基于图像处理的水泥砂浆搅拌过程视觉检测方法与流程
本发明涉及图像数据处理,具体涉及基于图像处理的水泥砂浆搅拌过程视觉检测方法。
背景技术:
1、水泥砂浆在搅拌过程中会引入一些气泡,通常搅拌速度越大,引入的气泡越多且体积越大;通常泡径小、分布均匀且构造稳定的气泡是有益气泡;反之泡径大、尺寸不一、不均匀且不稳定的气泡是有害气泡;因此在混凝土中引入气泡,并通过适当控制减水剂来控制气泡的数量与质量可以使混凝土的抗渗性、耐久性得到较大地提高;因此需要在水泥砂浆搅拌过程中,根据过程中产生的气泡情况,对搅拌过程进行控制,进而实现对水泥砂浆质量的控制。
2、现有方法中通常利用基于图像处理的计算机视觉来对气泡区域进行识别,根据图像中像素点的灰度值及分布位置通过fcm算法进行聚类,得到像素点的隶属度,进而获取像素点的气泡隶属度;然而气泡隶属度在图像中分布不均匀,存在其他干扰项导致无法准确获取气泡的全部区域,进而无法准确地根据气泡质量对水泥砂浆质量进行控制;其中砂砾区域即是对于气泡隶属度判断的最大干扰项,因此需要在获取隶属度后,需要根据气泡区域与砂砾区域在边缘表现上的差异来修正气泡隶属度,进而获取准确的气泡区域并完成水泥砂浆质量的控制。
技术实现思路
1、本发明提供基于图像处理的水泥砂浆搅拌过程视觉检测方法,以解决现有的水泥砂浆气泡区域识别不准确而影响水泥砂浆质量控制的问题,所采用的技术方案具体如下:
2、本发明一个实施例提供了基于图像处理的水泥砂浆搅拌过程视觉检测方法,该方法包括以下步骤:
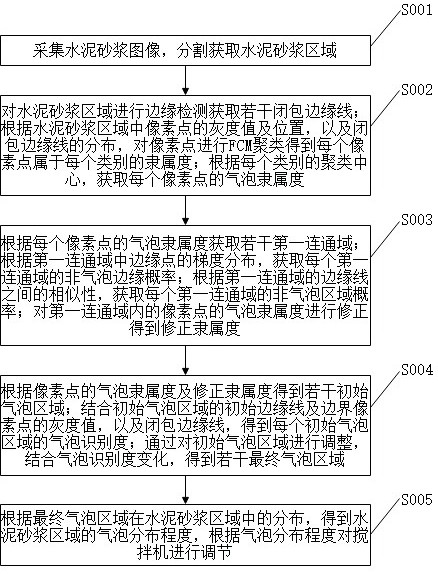
3、采集水泥砂浆图像,分割获取水泥砂浆区域;
4、对水泥砂浆区域进行边缘检测获取若干闭包边缘线;根据水泥砂浆区域中像素点的灰度值及位置,以及闭包边缘线的分布,对像素点进行fcm聚类得到每个像素点属于每个类别的隶属度;根据每个类别的聚类中心,获取每个像素点的气泡隶属度;
5、根据每个像素点的气泡隶属度获取若干第一连通域;根据第一连通域中边缘点的梯度分布,获取每个第一连通域的非气泡边缘概率;根据第一连通域的边缘线之间的相似性,获取每个第一连通域的非气泡区域概率;对第一连通域内的像素点的气泡隶属度进行修正得到修正隶属度;
6、根据像素点的气泡隶属度及修正隶属度得到若干初始气泡区域;结合初始气泡区域的初始边缘线及边界像素点的灰度值,以及闭包边缘线,得到每个初始气泡区域的气泡识别度;通过对初始气泡区域进行调整,结合气泡识别度变化,得到若干最终气泡区域;
7、根据最终气泡区域在水泥砂浆区域中的分布,得到水泥砂浆区域的气泡分布程度。
8、进一步的,所述对水泥砂浆区域进行边缘检测获取若干闭包边缘线,包括的具体方法为:
9、对水泥砂浆区域通过canny算法进行边缘检测,得到水泥砂浆区域中的若干边缘像素点;
10、通过边缘像素点的分布得到若干边缘线,对于任意一条边缘线,若该条边缘线上每个边缘像素点的八邻域范围内,其他边缘像素点的数量均大于或等于闭包阈值,将该条边缘线记为一条闭包边缘线;若存在任意一个边缘像素点的八邻域范围内其他边缘像素点的数量小于闭包阈值,该条边缘线不作为闭包边缘线;得到若干闭包边缘线。
11、进一步的,所述根据水泥砂浆区域中像素点的灰度值及位置,以及闭包边缘线的分布,对像素点进行fcm聚类得到每个像素点属于每个类别的隶属度;根据每个类别的聚类中心,获取每个像素点的气泡隶属度,包括的具体方法为:
12、对于任意一条闭包边缘线,该条闭包边缘线包围出一个区域,记为该条闭包边缘线的包围区域,获取包围区域的中心,记为该条闭包边缘线的中心;获取每条闭包边缘线的包围区域及中心;
13、对于水泥砂浆区域中任意一个像素点,获取与该像素点距离最近的闭包边缘线,记为该像素点的参考闭包边缘线,将该像素点到参考闭包边缘线的距离记为该像素点的第一距离,将该像素点到参考闭包边缘线的中心的距离记为该像素点的第二距离,将第一距离与第二距离的乘积,记为该像素点的闭包距离;获取水泥砂浆区域中每个像素点的闭包距离;
14、对水泥砂浆区域中所有像素点进行fcm聚类,距离度量采用像素点之间灰度值的差异及闭包距离的差异的欧式范数,得到若干类别以及每个像素点属于每个类别的隶属度;
15、对于任意一个类别,将其质心记为聚类中心,将聚类中心的灰度值与闭包距离的乘积,记为该类别气泡评价因子;获取每个类别的气泡评价因子,将气泡评价因子最小的类别,作为气泡类别,将每个像素点属于气泡类别的隶属度,记为每个像素点的气泡隶属度。
16、进一步的,所述根据每个像素点的气泡隶属度获取若干第一连通域,包括的具体方法为:
17、对所有像素点的气泡隶属度通过最大类间方差法,获取分割阈值,将气泡隶属度大于分割阈值的像素点,记为气泡可能像素点,得到若干气泡可能像素点;对所有气泡可能像素点进行连通域分析,得到若干连通域,记为若干第一连通域。
18、进一步的,所述每个第一连通域的非气泡边缘概率,具体的获取方法为:
19、获取每个第一连通域的边缘,记为每个第一连通域的边缘线,将第一连通域的边缘上的像素点,记为每个第一连通域的若干边缘点;
20、对于任意一个第一连通域的任意一个边缘点,通过sobel算子获取该边缘点的梯度方向,获取梯度方向的垂线,将沿垂线逆时针的方向作为梯度方向的垂直方向,将垂直方向与水平右向形成的夹角,记为该边缘点的边缘角度;获取每个第一连通域的每个边缘点的边缘角度,对所有边缘点进行dbscan聚类,距离度量采用边缘角度之间的差值绝对值,得到若干聚簇,记为若干边缘点聚簇;
21、对于任意一个第一连通域中任意一个边缘点,获取该边缘点与相邻两个边缘点各自的边缘角度之间的差值绝对值,将两个差值绝对值中最大值记为该边缘点的相邻角度差异;若该边缘点与相邻两个边缘点中至少一个边缘点属于同一个边缘点聚簇,将该边缘点记为同向边缘点;该第一连通域的非气泡边缘概率的计算方法为:
22、
23、其中,表示该第一连通域中同向边缘点的数量,表示该第一连通域中边缘点的数量,表示该第一连通域中第个边缘点的相邻角度差异,为预设的角度差异阈值,为超参数,表示以自然常数为底的指数函数,表示向上取整。
24、进一步的,所述每个第一连通域的非气泡区域概率,具体的获取方法为:
25、对所有第一连通域的边缘线进行dbscan聚类,距离度量采用边缘线之间的不相似度,其中不相似度为边缘线之间的相似性通过反比例函数输出得到,边缘线之间的相似性通过形状上下文算法获取;得到若干聚簇,记为若干边缘线聚簇;
26、对于任意一个第一连通域,获取该第一连通域的边缘线与所属边缘线聚簇中每个边缘线之间的不相似度的均值,将均值作为该第一连通域的非气泡区域概率。
27、进一步的,所述对第一连通域内的像素点的气泡隶属度进行修正得到修正隶属度,包括的具体方法为:
28、对于任意一个第一连通域,该第一连通域中第个像素点的修正隶属度的计算方法为:
29、
30、其中,表示该第一连通域中第个像素点的气泡隶属度,表示该第一连通域的非气泡边缘概率,表示该第一连通域的非气泡区域概率。
31、进一步的,所述根据像素点的气泡隶属度及修正隶属度得到若干初始气泡区域,包括的具体方法为:
32、将所有第一连通域中,修正隶属度大于分割阈值的像素点,记为气泡初始像素点;对所有气泡初始像素点进行dbscan聚类,距离度量采用气泡初始像素点之间的欧式距离,得到若干聚簇,记为若干气泡聚簇;对每个气泡聚簇通过凸包运算,得到每个气泡聚簇的包围区域,将包围区域作为初始气泡区域,得到若干初始气泡区域。
33、进一步的,所述得到每个初始气泡区域的气泡识别度;通过对初始气泡区域进行调整,结合气泡识别度变化,得到若干最终气泡区域,包括的具体方法为:
34、将每个气泡聚簇的质心,作为每个初始气泡区域的中心;对于任意一个初始气泡区域,获取该初始气泡区域的边缘,记为该初始气泡区域的初始边缘线,将初始边缘线上的若干像素点,记为该初始气泡区域的若干边界像素点,沿逆时针遍历,获取每个边界像素点与相邻下一个边界像素点的灰度值之间的差值绝对值,将所有差值绝对值的均值,作为该初始气泡区域的边缘灰度变化因子;获取该初始气泡区域的中心的参考闭包边缘线,通过形状上下文算法获取该初始气泡区域的初始边缘线与该参考闭包边缘线的相似性,该初始气泡区域的气泡识别度的计算方法为:
35、
36、其中,表示该初始气泡区域中所有像素点的气泡隶属度或修正隶属度的均值,所述气泡隶属度或修正隶属度的均值计算过程中,不存在修正隶属度的像素点采用气泡隶属度参与计算,存在修正隶属度的像素点采用修正隶属度参与计算;表示该初始气泡区域的初始边缘线与该初始气泡区域的中心的参考闭包边缘线的相似性,表示该初始气泡区域的边缘灰度变化因子,为超参数,表示以自然常数为底的指数函数;
37、对该初始气泡区域获取最大内切圆及最小外接圆,获取最大内切圆的圆心及半径,记为初始内切半径,通过迭代步长对初始内切半径进行增加,圆心不变,停止阈值为最小外接圆的半径,得到若干内切半径;
38、对于任意一个内切半径,通过内切半径得到一个圆,记为该内切半径的内切圆,将该内切圆包含的像素点集合与该初始气泡区域包含的像素点集合的并集对应的区域,作为该内切半径下的修正气泡区域,每个内切半径得到一个修正气泡区域,根据每个修正气泡区域中像素点的气泡隶属度或修正隶属度、边缘及边缘上像素点的灰度值,对每个修正气泡区域计算气泡识别度,将所有修正气泡区域的气泡识别度及该初始气泡区域的气泡识别度中的最大值对应的初始气泡区域或修正气泡区域,作为该初始气泡区域的最终气泡区域,最终气泡区域对应的内切半径或初始内切半径,记为该最终气泡区域的最佳内切半径。
39、进一步的,所述得到水泥砂浆区域的气泡分布程度,包括的具体方法为:
40、预设一个搜索窗口,根据搜索窗口步长,从水泥砂浆区域左上角第一个像素点为起点,先行后列对水泥砂浆区域进行遍历,得到水泥砂浆区域中的若干窗口区域;统计每个窗口区域中包含最终气泡区域的数量,得到的结果记为每个窗口区域的气泡数量,水泥砂浆区域的气泡分布程度的计算方法为:
41、
42、其中,表示所有最终气泡区域的最佳内切半径的均值,表示预设的合格气泡半径,表示所有窗口区域的气泡数量的方差,为超参数,表示以自然常数为底的指数函数。
43、本发明的有益效果是:本发明通过拍摄搅拌过程中的水泥砂浆图像,根据其中水泥砂浆区域中像素点的灰度值及分布,量化得到若干最终气泡区域,通过最终气泡区域的大小及分布,完成气泡分布程度的获取,用以反映水泥砂浆中的气泡质量;其中最终气泡区域获取过程中,通过像素点之间灰度值的差异及与闭包边缘线得到的闭包距离,聚类分析得到气泡隶属度,通过气泡区域闭合边缘的特点初步量化各像素点为气泡区域像素点的可能性;再通过气泡隶属度得到第一连通域,通过第一连通域的边缘点梯度方向变化,以及边缘线之间的相似性,对气泡隶属度修正得到修正隶属度,使得砂砾区域的像素点不会对气泡隶属度造成过多影响,从而提高气泡隶属度或修正隶属度的准确性;再通过气泡隶属度及修正隶属度,以及像素点的位置分布,得到初始气泡区域,并根据气泡区域的形状特征,对初始气泡区域调整得到最终气泡区域,使得最终气泡区域更加符合气泡区域的外形轮廓特征,进而提高最终气泡区域量化的准确性,从而提高气泡分布程度最终量化的准确性。
- 还没有人留言评论。精彩留言会获得点赞!