点云数据处理方法、装置、电子设备及存储介质与流程
本发明涉及计算机处理,具体而言,涉及一种点云数据处理方法、装置、电子设备及存储介质。
背景技术:
1、在tft-lcd产品生产过程中,cf生产中的ps(photo spacer),其作用是用来维持cf和tft的gap的柱子,向由这些形成的空间注入液晶。这些柱子高度需要进行控制。被测柱体在um级别。被测目标的检测精度需要控制在nm级别,测量过程中接触测量会影响产品质量,采用非接触测量的方式。
2、目前对半导体领域产品质量管控,采用白光干涉检测方式。测量工件的高度,以监测生产工艺中的质量问题。白光干涉仪扫描工件时,x、y轴方向,在步进机构驱动下,形成可控分辨率网格采样点云数据。
3、但现有的tft-lcd产品质量检测方式直接在点云数据的基础上进行高度测量,然后将处于预设高度范围内的连通域均视为目标测量区域,这样的高度测量由于点云数据的噪声、周边环境的影响等因素,存在测量结果不精确的问题。
技术实现思路
1、有鉴于此,本技术实施例的目的在于提供一种点云数据处理方法、装置、电子设备及存储介质,能够改善现有工件高度测量方式存在测量结果不精确的问题。
2、为实现上述技术目的,本技术采用的技术方案如下:
3、第一方面,本技术实施例提供了一种点云数据处理方法,所述方法包括:
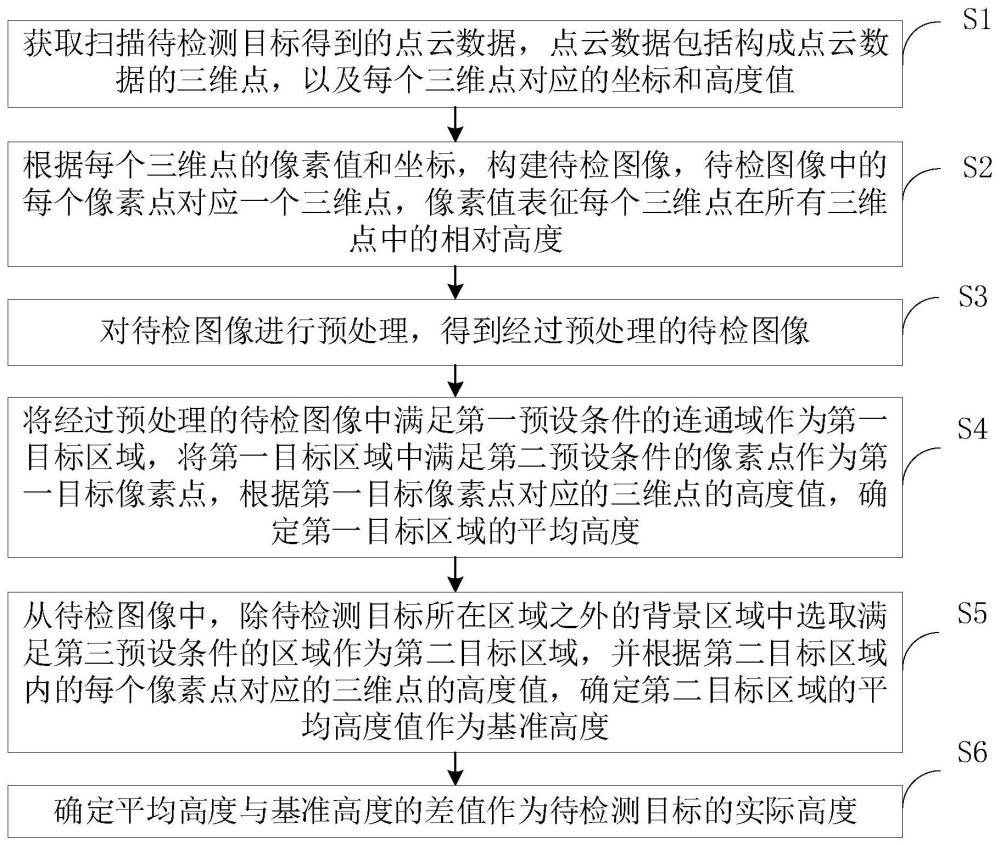
4、s1、获取扫描待检测目标得到的点云数据,所述点云数据包括构成所述点云数据的三维点,以及每个所述三维点对应的坐标和高度值;
5、s2、根据每个所述三维点的像素值和所述坐标,构建待检图像,所述待检图像中的每个像素点对应一个所述三维点,所述像素值表征每个所述三维点在所有所述三维点中的相对高度;
6、s3、对所述待检图像进行预处理,得到经过预处理的待检图像;
7、s4、将所述经过预处理的待检图像中满足第一预设条件的连通域作为第一目标区域,将所述第一目标区域中满足第二预设条件的像素点作为第一目标像素点,根据所述第一目标像素点对应的所述三维点的所述高度值,确定所述第一目标区域的平均高度;
8、s5、从所述待检图像中,除所述待检测目标所在区域之外的背景区域中选取满足第三预设条件的区域作为第二目标区域,并根据所述第二目标区域内的每个像素点对应的所述三维点的所述高度值,确定所述第二目标区域的平均高度值作为基准高度;
9、s6、确定所述平均高度与所述基准高度的差值作为所述待检测目标的实际高度。
10、结合第一方面,在一些可选的实施方式中,步骤s2包括:
11、确定每个所述三维点的所述坐标作为每个所述三维点对应的像素点的二维坐标;
12、根据每个所述三维点的所述高度值,确定每个所述三维点对应的像素点的所述像素值:
13、
14、式中,p表示像素点的像素值,h表示当前三维点的高度值,hmin表示所有三维点的高度值中的最小值,hmax表示所有三维点的高度值中的最大值;
15、根据所述二维坐标和所述像素值,构建所述待检图像。
16、结合第一方面,在一些可选的实施方式中,步骤s3包括:
17、将所述待检图像中,数量最多的所述像素值对应的像素点作为第二目标像素点,所述第二目标像素点对应的所述三维点的所述高度值作为目标高度值,根据所述目标高度值,通过预设图像重构策略,对所述待检图像进行图像重构,得到重构后的待检图像;
18、从所述重构后的待检图像中,选取至少一组参考区域,每组所述参考区域包括以所述待检测目标为对称中心、相互对称的第一参考子区域和第二参考子区域;
19、根据所述第一参考子区域和所述第二参考子区域中的每个像素点对应的高度值,确定所述待检测目标在所述第一参考子区域的一侧、与所述第二参考子区域所在的另一侧的高度差,并根据所述高度差矫正所述重构后的待检图像,得到矫正后的待检图像;
20、根据所述矫正后的待检图像中的每个像素点的所述像素值,对所述矫正后的待检图像进行二值化处理,得到所述经过预处理的待检图像。
21、结合第一方面,在一些可选的实施方式中,将所述待检图像中,数量最多的所述像素值对应的像素点作为第二目标像素点,所述第二目标像素点对应的所述三维点的所述高度值作为目标高度值,根据所述目标高度值,通过预设图像重构策略,对所述待检图像进行图像重构,得到重构后的待检图像,包括:
22、根据所述目标高度值,对所述待检图像中的每个像素点进行像素重构:
23、
24、式中,p表示当前像素点重构后的像素值,h表示当前像素点对应的高度值,h0表示目标高度值,δhup表示预设上限冗余区间,δhdown表示预设下限冗余区间;
25、当当前像素点对应的高度值大于(h0+δhup)时,将当前像素点的像素值置为255;
26、当当前像素点对应的高度值小于(h0-δhdown)时,将当前像素点的像素值置为0。
27、结合第一方面,在一些可选的实施方式中,根据所述第一参考子区域和所述第二参考子区域中的每个像素点对应的高度值,确定所述待检测目标在所述第一参考子区域的一侧、与所述第二参考子区域所在的另一侧的高度差,并根据所述高度差矫正所述重构后的待检图像,得到矫正后的待检图像,包括:
28、根据所述第一参考子区域中的每个像素点对应的所述高度值,确定所述第一参考子区域的第一高度均值;
29、根据所述第二参考子区域中的每个像素点对应的所述高度值,确定所述第二参考子区域的第二高度均值;
30、将所述第一高度均值和所述第二高度均值之差作为所述高度差,根据所述高度差,确定所述待检测目标的单步长倾斜差:
31、sd=cpx/(a2x-a1x)
32、式中,sd表示单步长倾斜差,cpx表示高度差,(a2x-a1x)表示第一参考子区域到第二参考子区域之间的像素点的数量,所述单步长倾斜差表征第一参考子区域到第二参考子区域之间的任一像素点与相邻像素点之间的高度差;
33、根据所述单步长倾斜差,沿所述第一参考子区域到所述第二参考子区域方向调整所述重构后的待检图像中的每个像素点的所述高度值。
34、结合第一方面,在一些可选的实施方式中,根据所述矫正后的待检图像中的每个像素点的所述像素值,对所述矫正后的待检图像进行二值化处理,得到所述经过预处理的待检图像,包括:
35、对所述矫正后的待检图像中的所有像素点的所述像素值进行数量排序,以确定所有像素点的所述像素值对应数量的最大值和次大值;
36、根据所述最大值和所述次大值对应的像素值,确定所述二值化处理的灰度阈值:
37、(hight1+hight2)/2
38、式中,hight1表示最大值对应的像素值,hight2表示次大值对应的像素值;
39、根据所述灰度阈值,对所述矫正后的待检图像进行所述二值化处理,其中,当所述矫正后的待检图像中的像素点的所述像素值大于所述灰度阈值时,将所述像素值置为255,当所述矫正后的待检图像中的像素点的所述像素值小于所述灰度阈值时,将所述像素值置为0。
40、结合第一方面,在一些可选的实施方式中,所述方法还包括:
41、s7、循环步骤s1至步骤s6,以对所述待检测目标进行多次高度测量,直至循环的次数大于等于预设次数;
42、s8、根据循环过程中得到的所有所述实际高度,确定所述待检测目标对应的样本标准差:
43、
44、式中,σ表示样本标准差,u表示n次测量得到的实际高度的算术平均值,xi表示第i次测量得到的实际高度;
45、s9、根据所述样本标准差判断所述待检测目标的高度测量效果,得到表征所述待检测目标的高度测量是否准确的判断结果,其中,当所述样本标准差小于等于预设标准差时,确定所述判断结果为表征所述待检测目标的高度测量准确的第一判断结果。
46、第二方面,本技术实施例还提供一种点云数据处理装置,所述装置包括:
47、获取单元,用于获取扫描待检测目标得到的点云数据,所述点云数据包括构成所述点云数据的三维点,以及每个所述三维点对应的坐标和高度值;
48、构建单元,用于根据每个所述三维点的像素值和所述坐标,构建待检图像,所述待检图像中的每个像素点对应一个所述三维点,所述像素值表征每个所述三维点在所有所述三维点中的相对高度;
49、预处理单元,用于对所述待检图像进行预处理,得到经过预处理的待检图像;
50、第一确定单元,用于将所述经过预处理的待检图像中满足第一预设条件的连通域作为第一目标区域,将所述第一目标区域中满足第二预设条件的像素点作为第一目标像素点,根据所述第一目标像素点对应的所述三维点的所述高度值,确定所述第一目标区域的平均高度;
51、第二确定单元,用于从所述待检图像中,除所述待检测目标所在区域之外的背景区域中选取满足第三预设条件的区域作为第二目标区域,并根据所述第二目标区域内的每个像素点对应的所述三维点的所述高度值,确定所述第二目标区域的平均高度值作为基准高度;
52、第三确定单元,用于确定所述平均高度与所述基准高度的差值作为所述待检测目标的实际高度。
53、第三方面,本技术实施例还提供一种电子设备,所述电子设备包括相互耦合的处理器及存储器,所述存储器内存储计算机程序,当所述计算机程序被所述处理器执行时,使得所述电子设备执行上述的方法。
54、第四方面,本技术实施例还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,当所述计算机程序在计算机上运行时,使得所述计算机执行上述的方法。
55、采用上述技术方案的发明,具有如下优点:
56、在本技术提供的技术方案中,首先获取扫描待检测目标得到的点云数据,然后根据点云数据中每个三维点的像素值和坐标,构建待检图像,并对待检图像进行预处理,得到经过预处理的待检图像,然后从经过预处理的待检图像中确定第一目标区域的平均高度,以及,从待检图像中确定第二目标区域的平均高度值作为基准高度,最后确定平均高度与基准高度的差值作为待检测目标的实际高度。如此,可以改善现有工件高度测量方式存在测量结果不精确的问题。
- 还没有人留言评论。精彩留言会获得点赞!