一种iToF校正图像获取及校正方法、系统、存储介质、设备与流程
本发明涉及图像校正,具体为一种itof校正图像获取及校正方法、系统、存储介质、设备。
背景技术:
1、在图像采集过程中,由于相机透镜和感光元件的特性,会导致图像出现畸变。这种畸变会使图像失真,影响后续的图像处理和分析任务。因此,在进行图像处理之前,需要进行畸变校正。
2、在相机畸变校正中,常采用张正友标定方法,其最少需要三张不同角度的图像,才能进行畸变校正;其中三张不同角度的图像,需要对静止的棋盘格进行采集,若采集的图像存在模糊阴影等,会影响校正准确度,并且最少需要三张图片其准确采集会花费一定时间,从而导致标定时间增加。
3、因此现在急需一种itof校正图像获取及校正方法、系统、存储介质、设备,能利用模糊图像进行标定,并通过一张图像解析出两组图像,提升fps(画面每秒传输帧数)速度,加快标定,减少标定时间。
技术实现思路
1、本发明的目的之一在于提供一种itof校正图像获取及校正方法,能利用模糊图像进行标定,并通过一张图像解析出两组图像,提升fps速度,加快标定,减少标定时间。
2、本发明提供的基础方案一:一种itof校正图像获取及校正方法,包括如下内容:
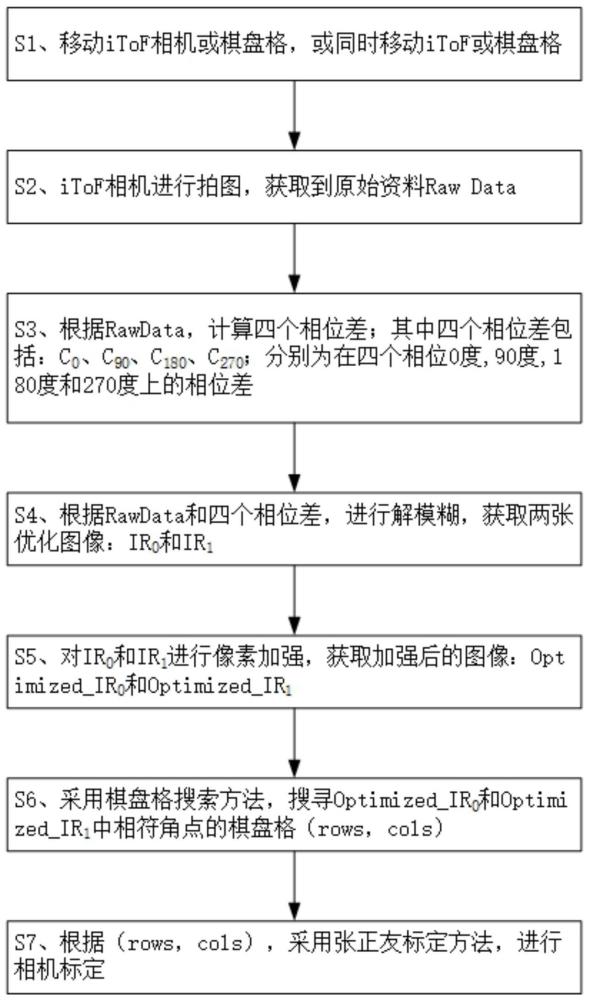
3、s1、移动itof相机或棋盘格,或同时移动itof或棋盘格;
4、s2、itof相机进行拍图,获取到原始资料raw data;
5、s3、根据raw data,计算四个相位差;其中四个相位差包括:c0、c90、c180、c270;分别为在四个相位0度,90度,180度和270度上的相位差;
6、s4、根据raw data和四个相位差,进行解模糊,获取两张优化图像:ir0和ir1;
7、s5、对ir0和ir1进行像素加强,获取加强后的图像:optimized_ir0和optimized_ir1;
8、s6、采用棋盘格搜索方法,搜寻optimized_ir0和optimized_ir1中相符角点的棋盘格(rows,cols);
9、s7、根据(rows,cols),采用张正友标定方法,进行相机标定。
10、基础方案一的有益效果:镜头在快速移动时候,受到曝光时间(积分时间)的影响,会产生画面的模糊,通常模糊的图像是不能使用的,而本方案中首先移动itof相机或棋盘格,或同时移动itof或棋盘格,通过itof相机进行拍图,获取到原始资料raw data,即模糊的图像;由于itof相机和棋盘格相对移动,因此模糊的图像中包含了棋盘格在不同位置的图像进信息;
11、然后根据raw data,计算四个相位差;其中四个相位差包括:c0、c90、c180、c270;其为在四个相位0度,90度,180度和270度上的相位差,因为itof是利用红外光,飞行时间计算深度距离,其在感光模组(sensor)上利用两个电容接收的红外光,电容的接收过程,会进行四次延迟(delay),以0-360度进行分割,分别为0度,90度,180度和270度(四个相位),通过两个电容值的差,可以获取四个相位延迟(0度,90度,180度和270度),通常利用电容值的和作为ir图像;
12、再然后根据raw data和四个相位差,进行解模糊,获取两张优化图像:ir0和ir1,从而在同一张图像画面中,解析出两组图像,加快图像画面的取得,将fps提升至两倍速度,加快了三张不同角度的棋盘格的寻算,减少标定时间;
13、再然后本方案对ir0和ir1进行像素加强,获取加强后的图像:optimized_ir0和optimized_ir1,加强后的图像棋盘格更容易搜寻,进一步减少标定时间;
14、最后采用棋盘格搜索方法,搜寻optimized_ir0和optimized_ir1中相符角点的棋盘格(rows,cols),根据(rows,cols),采用张正友标定方法,进行相机标定。
15、综上所述,本方案能利用模糊图像进行标定,在模糊的棋盘格图像中,找到清晰的棋盘格影像,并通过一张图像解析出两组图像,提升fps速度,加快标定,减少标定时间。
16、进一步,所述c0=a0-b0,c90=a90-b90,c180=a180-b180,c270=a270-b270;其中a0,b0,a90,b90,a180,b180,a270,b270为itof感光模组上两个电容a和b在四个相位0度,90度,180度和270度上的电容值。
17、有益效果:itof是利用红外光,飞行时间计算深度距离,其在感光模组(sensor)上利用两个电容接收的红外光,两个电容分别定义为a和b;电容的接收过程,会进行四次延迟(delay),以0-360度进行分割,分别为0度,90度,180度和270度(四个相位),所以电容分别定义电容值为a0,b0,a90,b90,a180,b180,a270,b270;将两个电容值的差,依据四个相位延迟(0度,90度,180度和270度)分别定义,通常利用电容值的和作为ir图像,如因此本方案中四个相位为c0=a0-b0,c90=a90-b90,c180=a180-b180,c270=a270-b270。
18、与现有技术相比,本方案不能用于dtof,结构光,rgb等相机,也不能使用相对静止物体,需要itof或者棋盘格在移动状态下,产生模糊才能进行校正;其中rgb,结构光,dtof的储存光的原理,都只需要一颗电容,而itof是利用两颗电容储存,故在硬件上是不相同的,且itof有延迟收光技术,所以四个延迟的相位,需要进行四次收图。
19、进一步,所述s4,包括:
20、将四个相位差,以0度和180度与90度和270度两组相反相位进行相加,获取相加后的两组图像t0和t90:t0=c0+c180与t90=c90+c270;
21、分别对t0和t90的像素取绝对值abs_t0和abs_t90:abs_t0=abs(t0),abs_t90=abs(t90);
22、计算t0和t90像素的平均值,并将t0和t90中小于平均值的像素设为0,获取两张优化图像:ir0和ir1。
23、有益效果:本方案中可以进行解模糊像素的原因是0度与180度为相反相位,当0度相位数值为1时,180度相位数值为-1,当物体静止时,0度与180度的数值相加为0,而本方案中利用移动时候,相位延迟会使物体出现不同的像素坐标,所以会出现的相加的数字不为0的情况,利用模糊解析,处理不为0的像素坐标,可以得到棋盘格边界,以此类推90度与270度也是相同原理;且平均值的计算和判断可以减少环境中的杂讯。
24、进一步,所述s5,包括:
25、对ir0和ir1采用霍夫转换搜寻线段,获得(p,θ),其中p为坐标原点(0,0)的距离,θ为以弧度为单位的线旋转角度;
26、采用直线方程式y=ax+b进行像素搜寻,获取加强后的图像:optimized_ir0和optimized_ir1,其中像素搜索为对符合预设要求的像素进行加强。
27、有益效果:采用霍夫转换进行加强,加强后的图像棋盘格更容易搜寻。
28、本发明的目的之二在于提供一种itof校正图像获取及校正系统,能利用模糊图像进行标定,并通过一张图像解析出两组图像,提升fps速度,加快标定,减少标定时间。
29、本发明提供基础方案二:一种itof校正图像获取及校正系统,包括:itof相机、棋盘格和处理器;
30、itof相机和棋盘格均与处理器连接;
31、移动itof相机或棋盘格,或同时移动itof或棋盘格,itof相机进行拍图,获取到原始资料raw data,并发送给处理器;
32、处理器,用于根据raw data,计算四个相位差;其中四个相位差包括:c0、c90、c180、c270;其为在四个相位0度,90度,180度和270度上的相位差;
33、还用于根据raw data和四个相位差,进行解模糊,获取两张优化图像:ir0和ir1;
34、还用于对ir0和ir1进行像素加强,获取加强后的图像:optimized_ir0和optimized_ir1;
35、还用于采用棋盘格搜索方法,搜寻optimized_ir0和optimized_ir1中相符角点的棋盘格(rows,cols);
36、还用于根据(rows,cols),采用张正友标定方法,控制itof相机进行相机标定。
37、基础方案二的有益效果:镜头在快速移动时候,受到曝光时间(积分时间)的影响,会产生画面的模糊,通常模糊的图像是不能使用的,而本方案中首先移动itof相机或棋盘格,或同时移动itof或棋盘格,通过itof相机进行拍图,获取到原始资料raw data,即模糊的图像;由于itof相机和棋盘格相对移动,因此模糊的图像中包含了棋盘格在不同位置的图像进信息;
38、然后根据raw data,计算四个相位差;其中四个相位差包括:c0、c90、c180、c270;其为在四个相位0度,90度,180度和270度上的相位差,因为itof是利用红外光,飞行时间计算深度距离,其在感光模组(sensor)上利用两个电容接收的红外光,电容的接收过程,会进行四次延迟(delay),以0-360度进行分割,分别为0度,90度,180度和270度(四个相位),通过两个电容值的差,可以获取四个相位延迟(0度,90度,180度和270度),通常利用电容值的和作为ir图像;
39、再然后根据raw data和四个相位差,进行解模糊,获取两张优化图像:ir0和ir1,从而在同一张图像画面中,解析出两组图像,加快图像画面的取得,将fps提升至两倍速度,加快了三张不同角度的棋盘格的寻算,减少标定时间;
40、再然后本方案对ir0和ir1进行像素加强,获取加强后的图像:optimized_ir0和optimized_ir1,加强后的图像棋盘格更容易搜寻,进一步减少标定时间;
41、最后采用棋盘格搜索方法,搜寻optimized_ir0和optimized_ir1中相符角点的棋盘格(rows,cols),根据(rows,cols),采用张正友标定方法,进行相机标定。
42、综上所述,本方案能利用模糊图像进行标定,在模糊的棋盘格图像中,找到清晰的棋盘格影像,并通过一张图像解析出两组图像,提升fps(画面每秒传输帧数)速度,加快标定,减少标定时间。
43、进一步,所述c0=a0-b0,c90=a90-b90,c180=a180-b180,c270=a270-b270;其中a0,b0,a90,b90,a180,b180,a270,b270为itof感光模组上两个电容a和b在四个相位0度,90度,180度和270度上的电容值。
44、有益效果:itof是利用红外光,飞行时间计算深度距离,其在感光模组(sensor)上利用两个电容接收的红外光,两个电容分别定义为a和b;电容的接收过程,会进行四次延迟(delay),以0-360度进行分割,分别为0度,90度,180度和270度(四个相位),所以电容分别定义电容值为a0,b0,a90,b90,a180,b180,a270,b270;将两个电容值的差,依据四个相位延迟(0度,90度,180度和270度)分别定义,通常利用电容值的和作为ir图像,如因此本方案中四个相位为c0=a0-b0,c90=a90-b90,c180=a180-b180,c270=a270-b270。
45、与现有技术相比,本方案不能用于dtof,结构光,rgb等相机,也不能使用相对静止物体,需要itof或者棋盘格在移动状态下,产生模糊才能进行校正;其中rgb,结构光,dtof的储存光的原理,都只需要一颗电容,而itof是利用两颗电容储存,故在硬件上是不相同的,且itof有延迟收光技术,所以四个延迟的相位,需要进行四次收图。
46、进一步,所述处理器包括:解模糊模块;
47、所述解模糊模块,用于获取输入c0、c90、c180和c270,输出ir0和ir1,具体处理包括:
48、将四个相位差,以0度和180度与90度和270度两组相反相位进行相加,获取相加后的两组图像t0和t90:t0=c0+c180与t90=c90+c270;
49、分别对t0和t90的像素取绝对值abs_t0和abs_t90:abs_t0=abs(t0),abs_t90=abs(t90);
50、计算t0和t90像素的平均值,并将t0和t90中小于平均值的像素设为0,获取两张优化图像:ir0和ir1。
51、有益效果:本方案中可以进行解模糊像素的原因是0度与180度为相反相位,当0度相位数值为1时,180度相位数值为-1,当物体静止时,0度与180度的数值相加为0,而本方案中利用移动时候,相位延迟会使物体出现不同的像素坐标,所以会出现的相加的数字不为0的情况,利用模糊解析,处理不为0的像素坐标,可以得到棋盘格边界,以此类推90度与270度也是相同原理;且平均值的计算和判断可以减少环境中的杂讯。
52、进一步,所述处理器包括:像素加强模块;
53、所述像素加强模块,用于获取输入ir0和ir1,输出optimized_ir0和optimized_ir1,具体处理包括:
54、对ir0和ir1采用霍夫转换搜寻线段,获得(p,θ),其中p为坐标原点(0,0)的距离,θ为以弧度为单位的线旋转角度;
55、采用直线方程式y=ax+b进行像素搜寻,获取加强后的图像:optimized_ir0和optimized_ir1,其中像素搜索为对符合预设要求的像素进行加强。
56、有益效果:采用霍夫转换进行加强,加强后的图像棋盘格更容易搜寻。
57、本发明的目的之三在于提供一种存储介质,能利用模糊图像进行标定,并通过一张图像解析出两组图像,提升fps速度,加快标定,减少标定时间。
58、本发明提供基础方案三:一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现所述itof校正图像获取及校正方法的步骤。
59、基础方案三的有益效果:本方案提供一种存储介质,存储介质上存储有计算机程序,计算机程序被处理器执行时实现所述itof校正图像获取及校正方法的步骤,便于itof校正图像获取及校正生成方法的应用和推广。
60、本发明的目的之四在于提供一种设备,能利用模糊图像进行标定,并通过一张图像解析出两组图像,提升fps速度,加快标定,减少标定时间。
61、本发明提供基础方案四:一种设备,采用上述itof校正图像获取及校正方法。
62、基础方案四的有益效果:本方案能利用模糊图像进行标定,在模糊的棋盘格图像中,找到清晰的棋盘格影像,并通过一张图像解析出两组图像,提升fps速度,加快标定,减少标定时间。
- 还没有人留言评论。精彩留言会获得点赞!