一种地面分割方法、装置、设备及存储介质与流程
本发明实施例涉及无人机,尤其涉及一种地面分割方法、装置、设备及存储介质。
背景技术:
1、在植保无人机的应用中存在大量地形不稳定的工作场景,例如山地、果园、高杆植物田等,需要无人机具备较强的地形的感知能力,对于无人机的飞行控制进行赋能,通常使用仿地雷达的单点测高技术辅助仿地飞行。由于仿地雷达的毫米波数据稀疏且噪声较大的传感器数据特性,单点测高技术带来的噪声数据无法稳定辅助植保无人机正常作业下应用中的定高仿地飞行。
技术实现思路
1、本发明提供了一种地面分割方法、装置、设备及存储介质,通过分割得到地面,以解决现有技术中无法正常仿地飞行作业的问题。
2、根据本发明的一方面,提供了一种地面分割方法,所述方法包括:
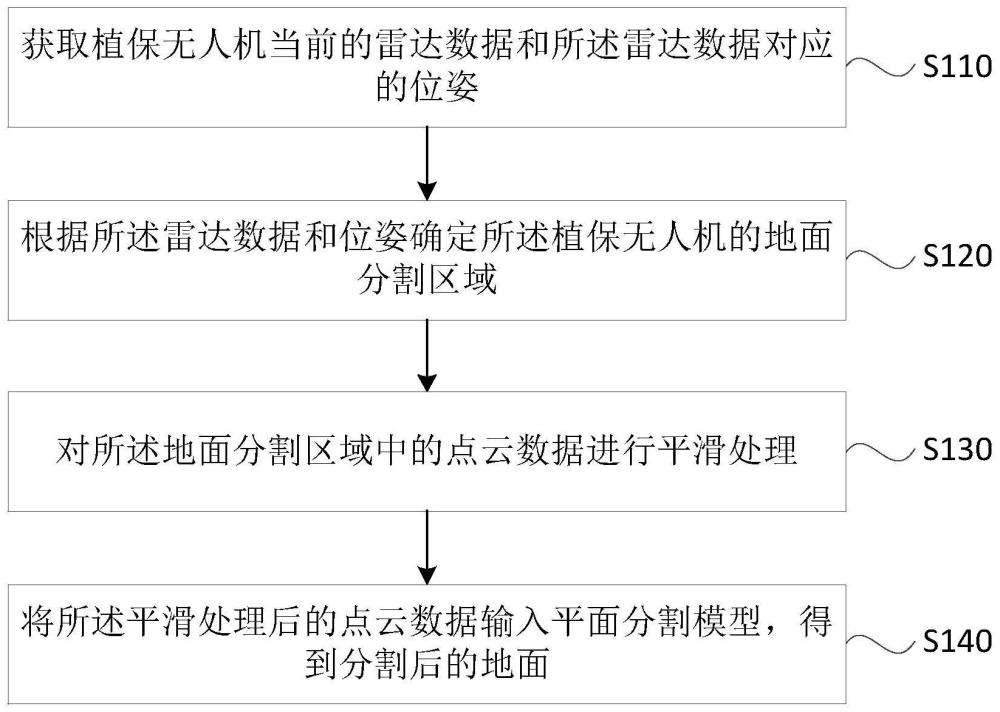
3、获取植保无人机当前的雷达数据和所述雷达数据对应的位姿;
4、根据所述雷达数据和位姿确定所述植保无人机的地面分割区域;
5、对所述地面分割区域中的点云数据进行平滑处理;
6、将所述平滑处理后的点云数据输入平面分割模型,得到分割后的地面。
7、根据本发明的另一方面,提供了一种地面分割装置,所述装置包括:
8、获取模块,用于获取植保无人机当前的雷达数据和所述雷达数据对应的位姿;
9、确定模块,用于根据所述雷达数据和位姿确定所述植保无人机的地面分割区域;
10、处理模块,用于对所述地面分割区域中的点云数据进行平滑处理;
11、分割模块,用于将所述平滑处理后的点云数据输入平面分割模型,得到分割后的地面。
12、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:至少一个处理器;以及
13、与所述至少一个处理器通信连接的存储器;其中,
14、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的地面分割方法。
15、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的地面分割方法。
16、本发明实施例的一种地面分割方法、装置、设备及存储介质,所述方法包括:获取植保无人机当前的雷达数据和所述雷达数据对应的位姿;根据所述雷达数据和位姿确定所述植保无人机的地面分割区域;对所述地面分割区域中的点云数据进行平滑处理;将所述平滑处理后的点云数据输入平面分割模型,得到分割后的地面。该方法通过根据植保无人机当前的雷达数据和位姿确定地面分割区域,并进行平滑数据,将平滑处理后的点云数据输入平面分割模型,能够准确地得到分割后的地面,从而保证植保无人机的正常仿地飞行作业。
17、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种地面分割方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述获取植保无人机当前的雷达数据和所述雷达数据对应的位姿,包括:
3.根据权利要求1所述的方法,其特征在于,所述根据所述雷达数据和位姿确定所述植保无人机的地面分割区域,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述当前作业区域确定地面分割区域,包括:
5.根据权利要求1所述的方法,其特征在于,所述对所述地面分割区域中的点云数据进行平滑处理,包括:
6.根据权利要求1所述的方法,其特征在于,所述将所述平滑处理后的点云数据输入平面分割模型,得到分割后的地面,包括:
7.根据权利要求6所述的方法,其特征在于,所述确定所述平滑处理后的点云数据中支持所述平面模型的点云数据的数量,包括:
8.一种地面分割装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,所述设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的地面分割方法。
技术总结
本发明公开了一种地面分割方法、装置、设备及存储介质。所述方法包括:获取植保无人机当前的雷达数据和所述雷达数据对应的位姿;根据所述雷达数据和位姿确定所述植保无人机的地面分割区域;对所述地面分割区域中的点云数据进行平滑处理;将所述平滑处理后的点云数据输入平面分割模型,得到分割后的地面。该方法通过根据植保无人机当前的雷达数据和位姿确定地面分割区域,并进行平滑数据,将平滑处理后的点云数据输入平面分割模型,能够准确地得到分割后的地面,从而保证植保无人机的正常仿地飞行作业。
技术研发人员:展志昊,戴源远
受保护的技术使用者:拓攻(南京)机器人有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!