一种气雾喷雾器喷头安装辅助定位方法与流程
本发明涉及气雾喷雾器喷头安装位置图像增强,具体涉及一种气雾喷雾器喷头安装辅助定位方法。
背景技术:
1、气雾喷雾器是一种将液体药物或其他物质以微小液滴的形式喷射到空气中的设备,在医疗、清洁用品等领域均有广泛应用。喷头的安装位置和角度对喷雾效果有很大影响,为了提高气雾喷雾器的喷雾效果,需要在安装过程中对喷头进行准确的定位。
2、随着计算机视觉技术的发展,一些先进的喷雾器生产线开始尝试使用视觉定位系统来辅助安装喷头。这种系统可以通过摄像头捕捉到喷头的图像,然后通过图像处理算法来确定喷头的位置,从而实现自动化的喷头安装。但是在现有技术中,对喷头进行安装时,可能会出现由于机械臂移动造成图像采集过程中出现模糊区域,干扰目标识别检测的结果,因此需要在检测之前对图像进行增强处理。但是,现有的非盲去卷积增强算法,在实际使用的过程中需要图像损失过程作为参数,而在实际安装过程中,周围的光线变化、机械臂移动造成的图像损失都是不可预知的,无法得到相对理想的增强效果,导致安装位置的边缘和区域特征难以识别,从而无法准确安装喷雾器喷头。
技术实现思路
1、为了解决对喷头进行安装时,可能会出现由于机械臂移动造成图像采集过程中出现模糊区域,导致安装位置的边缘和区域特征难以识别,从而无法得到相对理想的增强效果,进而无法准确安装喷雾器喷头的技术问题,本发明的目的在于提供一种气雾喷雾器喷头安装辅助定位方法,所采用的技术方案具体如下:
2、一种气雾喷雾器喷头安装辅助定位方法,该方法包括:
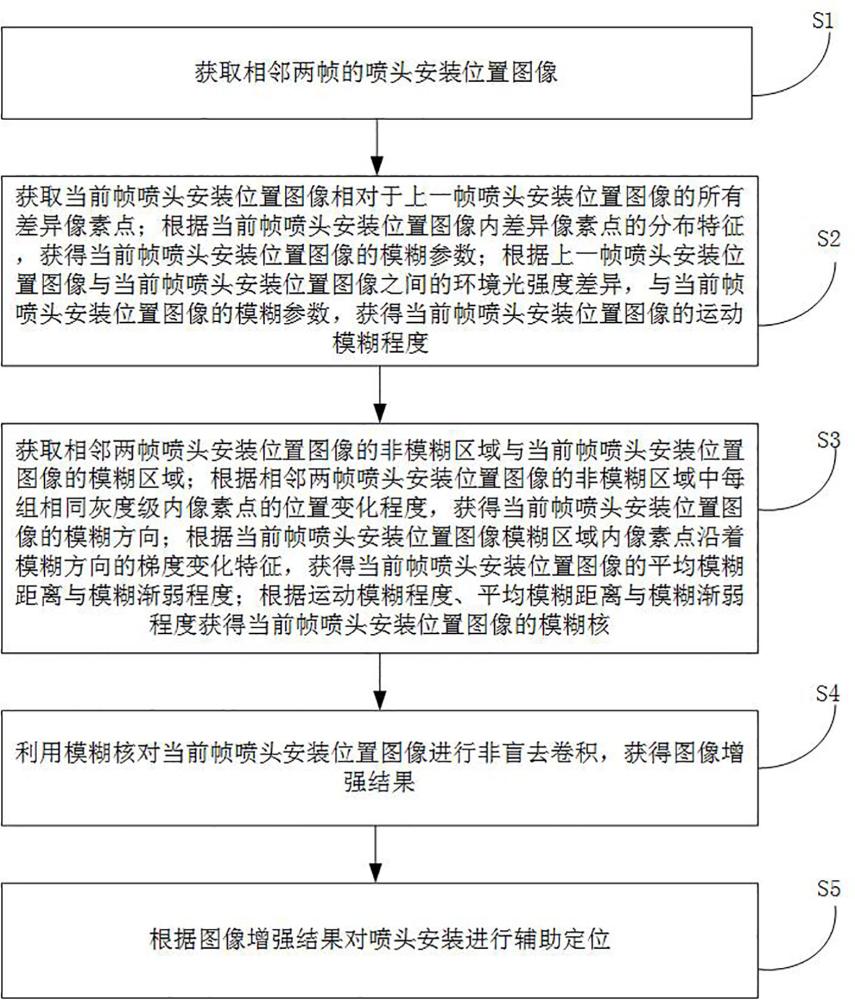
3、获取相邻两帧的喷头安装位置图像;
4、获取当前帧喷头安装位置图像相对于上一帧喷头安装位置图像的所有差异像素点;根据当前帧喷头安装位置图像内差异像素点的分布特征,获得当前帧喷头安装位置图像的模糊参数;根据上一帧喷头安装位置图像与当前帧喷头安装位置图像之间的环境光强度差异,与当前帧喷头安装位置图像的所述模糊参数,获得当前帧喷头安装位置图像的运动模糊程度;
5、获取相邻两帧喷头安装位置图像的非模糊区域与当前帧喷头安装位置图像的模糊区域;根据相邻两帧喷头安装位置图像的非模糊区域中每组相同灰度级内像素点的位置变化程度,获得当前帧喷头安装位置图像的模糊方向;根据当前帧喷头安装位置图像模糊区域内像素点沿着模糊方向的梯度变化特征,获得当前帧喷头安装位置图像的平均模糊距离与模糊渐弱程度;根据所述运动模糊程度、所述平均模糊距离与所述模糊渐弱程度获得当前帧喷头安装位置图像的模糊核;
6、利用所述模糊核对当前帧喷头安装位置图像进行非盲去卷积,获得图像增强结果;
7、根据所述图像增强结果对喷头安装进行辅助定位。
8、进一步地,所述模糊参数的获取方法包括:
9、根据当前帧喷头安装位置图像的每个差异像素点相对于差异像素点整体的离散程度,获得当前帧喷头安装位置图像差异像素点的位置分布特征;
10、将所述位置分布特征与差异像素点数量的乘积作为当前帧喷头安装位置图像的模糊参数。
11、进一步地,所述位置分布特征的获取方法包括:
12、获取所述差异像素点的横坐标平均值与纵坐标平均值;
13、计算每个差异像素点的横坐标与所述横坐标平均值的差异作为第一差异;计算每个差异像素点的纵坐标与所述纵坐标平均值的差异作为第二差异;将所述第一差异与所述第二差异的乘积作为每个差异像素点相对于差异像素点整体的离散程度;
14、将每个差异像素点的所述离散程度求平均并进行负相关映射归一化处理获得每个差异像素点的位置分布特征。
15、进一步地,所述运动模糊程度的获取方法包括:
16、将所述环境光强度差异与所述模糊参数的乘积进行归一化处理,获得当前帧喷头安装位置图像的运动模糊程度。
17、进一步地,获取相邻两帧喷头安装位置图像的非模糊区域与当前帧喷头安装位置图像的模糊区域,包括:
18、计算当前帧喷头安装位置图像的所有差异像素点与所述差异像素点在上一帧喷头安装位置图像上的对应位置像素点的梯度值;将所述差异像素点按照梯度值大小顺序进行排序,选取序列中梯度值差值最大的相邻两个差异像素点中,梯度值最大的差异像素点作为标准像素点;
19、将梯度值大于所述标准像素点的差异像素点组成的区域作为当前帧喷头安装位置图像的非模糊区域,将梯度值小于所述标准像素点的差异像素点组成的区域作为当前帧喷头安装位置图像的模糊区域;
20、将对应位置像素点按照梯度值大小顺序进行排序,选取序列中梯度值差值最大的相邻两个对应位置像素点中,梯度值最大的对应位置像素点作为参考像素点,将梯度值大于所述参考像素点的对应位置像素点组成的区域作为上一帧喷头安装位置图像的非模糊区域。
21、进一步地,所述位置变化程度的获取方法包括:
22、计算当前帧喷头安装位置图像与上一帧喷头安装位置图像内所述非模糊区域之间的灰度均值差值,作为非运动因素导致的灰度变化程度;
23、将当前帧喷头安装位置图像非模糊区域内每个灰度级内的像素点作为第一类像素点,并根据所述灰度变化程度获取所有所述第一类像素点在上一帧喷头安装位置图像的相同灰度级的像素点作为第二类像素点;
24、将每个第一类像素点与距离最近的第二类像素点进行连线,并将所述第一类像素点作为顶点,计算所有连线与横坐标轴之间的角度均值,作为相邻两帧喷头安装位置图像的非模糊区域内每组相同灰度级内像素点的位置变化程度。
25、进一步地,所述模糊方向的获取方法包括:
26、将每个灰度级像素点的位置变化程度求平均获得当前帧喷头安装位置图像非模糊区域的所述模糊方向。
27、进一步地,所述平均模糊距离与所述模糊渐弱程度的获取方法包括:
28、在所述模糊区域中,沿着所述模糊方向选取梯度值小于上一个像素点梯度值的每个模糊区域像素点作为起始点,从每个起始点沿着模糊方向进行遍历,选取梯度值小于下一个像素点的模糊区域像素点作为每个起始点的对应终点;
29、将每个起始点与对应终点之间的像素点数量作为模糊距离,将所有模糊距离求平均获得所述平均模糊距离;
30、将每个起始点与对应终点之间的所有像素点的梯度值求平均获得所述模糊渐弱程度。
31、进一步地,所述模糊核的获取方法包括:
32、根据所述模糊距离与所述模糊核最大尺寸获得当前帧喷头安装位置图像的模糊核尺寸;
33、根据所述模糊核尺寸、所述运动模糊程度与所述模糊渐弱程度设计模糊核。
34、进一步地,所述模糊核尺寸的获取方法包括:
35、根据模糊核尺寸计算公式获取所述模糊核尺寸,所述模糊核尺寸计算公式如下所示:
36、;式中,表示当前帧喷头安装位置图像模糊区域的模糊核尺寸;表示当前帧喷头安装位置图像模糊区域的平均模糊距离;表示当前帧喷头安装位置图像模糊区域的最大模糊距离;表示当前帧喷头安装位置图像模糊区域的预设模糊核最大值;表示将不是奇数的数值向上舍入为最接近的奇数的函数。
37、本发明具有如下有益效果:
38、本发明获取相邻两帧的喷头安装位置图像,以便于后续获得消除模糊区域的自适应参数;由于需要对相邻帧喷头安装位置图像的差异部分进行分析,所以获取当前帧喷头安装位置图像的所有差异像素点;由于差异像素点是由相机运动形成的,所以差异像素点的数量与位置分布特征能够反映出当前帧喷头安装位置图像的运动模糊程度,所以根据差异像素点的分布特征,获得当前帧喷头安装位置图像的模糊参数;由于相邻帧喷头安装位置图像的环境光强度不同,造成相邻帧喷头安装位置图像运动模糊程度不同,所以运动模糊程度与环境光强度差异和模糊参数有关;获取相邻两帧喷头安装位置图像的非模糊区域,通过非模糊区域的位置变化可以反映出模糊方向;获取当前帧喷头安装位置图像的模糊区域,方便后续对模糊区域进行分析获取模糊核;根据相邻两帧喷头安装位置图像的非模糊区域内每组相同灰度级内像素点的位置变化程度,获得当前帧喷头安装位置图像的模糊方向,位置变化程度反映出模糊区域的运动趋势;由于模糊区域像素点沿模糊方向上物体运动模糊的状态时逐渐变弱的,即像素点的梯度值会逐渐减小,所以通过当前帧喷头安装位置图像模糊区域内像素点沿着模糊方向的梯度变化特征,获得当前帧喷头安装位置图像的平均模糊距离与模糊渐弱程度;由于模糊程度、平均模糊距离与模糊渐弱程度均反映了模糊区域的特性,可以根据运动模糊程度、平均模糊距离与模糊渐弱程度获得当前帧喷头安装位置图像的模糊核;利用模糊核对当前帧喷头安装位置图像进行非盲去卷积,获得图像增强结果;根据图像增强结果可以得到消除模糊区域的喷头安装位置图像,能够对喷头安装进行辅助定位。本发明结合实际模糊变化规律和图像物理特征得到自适应模糊核,能够得到理想的图像增强结果,进而能够根据图像增强结果准确地安装喷头。
- 还没有人留言评论。精彩留言会获得点赞!