一种托盘格口定位检测方法、系统、装置及介质与流程
本申请涉及一种图像定位检测,尤其涉及一种托盘格口定位检测方法、系统、装置及介质。
背景技术:
1、近几年,由于新能源汽车具有低成本和环保优势,其市场份额不断增加。作为新能源汽车的重要组成部分之一,电池备受关注。随着新能源汽车的普及,电池的运输和保护环节变得尤为重要,自动化生产已成为必然趋势。
2、目前,电池的运输和保护主要采用高密度泡沫托盘,托盘上冲压出多个格口用于放置电池。电池从生产线输送到指定位置,由附近的机械手抓取并放置到托盘中。抓取步骤通过机械臂示教位进行,依靠输送线末端的限位机构提供稳定的电池位置;放置步骤则主要依赖于视觉引导。然而,目前的视觉引导方案主要基于2d视觉存在以下根本性问题:
3、成像稳定性较差。由于白色泡沫难以打光,光源对距离和位置变化敏感,而实际情况下,托盘的位置精度无法保证始终稳定。
4、算法稳定性较差。考虑到第一点,视觉算法对光照变化敏感,当光照发生变化时,成像也会发生变化,从而可能需要重新设计定位算法。
5、目前迫切需要解决如何准确定位托盘格口的位置,以确保成像稳定和算法稳定。这一问题的解决将提高电池的运输和保护环节的效率和可靠性。
技术实现思路
1、本申请的目的在于提供一种托盘格口定位检测方法、系统、装置及介质,以至少解决相关技术中如何准确定位托盘格口的位置,以确保成像稳定和算法稳定的问题。
2、本申请第一方面提供一种托盘格口定位检测方法,应用于3d成像相机,所述方法包括:
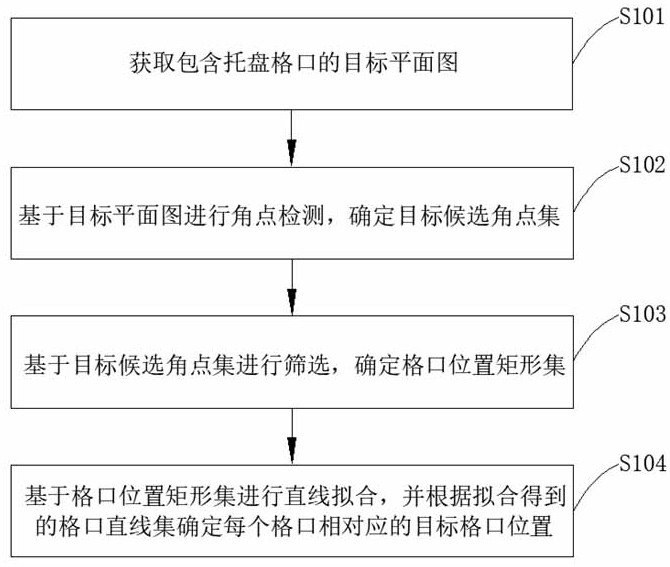
3、获取包含托盘格口的目标平面图;
4、基于所述目标平面图进行角点检测,确定目标候选角点集;
5、基于所述目标候选角点集进行筛选,确定格口位置矩形集;
6、基于所述格口位置矩形集进行直线拟合,并根据拟合得到的格口直线集确定每个格口相对应的目标格口位置。
7、在一个实施例中,所述获取包含托盘格口的目标平面图,包括:
8、根据获取到的包含托盘格口的深度图进行处理,得到三维点云数据;
9、基于所述三维点云数据进行预处理,得到目标托盘图像;
10、基于所述目标托盘图像进行投影,得到所述目标平面图。
11、在一个实施例中,所述基于所述三维点云数据进行预处理,得到目标托盘图像,包括:
12、根据所述三维点云数据进行平面拟合,得到第一图像集;
13、根据所述第一图像集进行面积筛选,得到第二图像集;
14、根据所述第二图像集进行高度筛选,确定初始托盘图像;
15、基于所述初始托盘图像进行补全处理,得到所述目标托盘图像。
16、在一个实施例中,所述基于所述目标托盘图像进行投影,得到所述目标平面图,包括:
17、根据所述目标托盘图像,确定边界范围;
18、根据所述边界范围,确定投影平面;
19、根据所述目标托盘图像在所述投影平面上的投影,得到所述目标平面图。
20、在一个实施例中,所述基于所述目标平面图进行角点检测,确定目标候选角点集,包括:
21、根据所述目标平面图进行角点检测确定包含格口的第一候选角点集;
22、根据所述第一候选角点集进行角度筛选,确定第二候选角点集;
23、根据所述第二候选角点集,采用预设矩形尺寸进行筛选,确定所述目标候选角点集。
24、在一个实施例中,所述基于所述目标候选角点集进行筛选,确定格口位置矩形集,包括:
25、根据所述目标候选角点集中每个目标候选角点,确定相对应的近邻角点;
26、根据所述目标候选角点和相对应的所述近邻角点确定所述格口位置矩形集。
27、在一个实施例中,所述基于所述格口位置矩形集进行直线拟合,并根据拟合得到的格口直线集确定每个格口相对应的目标格口位置,包括:
28、根据所述格口位置矩形集进行直线拟合,得到初始格口直线集;
29、根据所述初始格口直线集中相邻格口直线之间的角度进行筛选,确定目标格口直线集;
30、根据所述目标格口直线集,采用克莱姆法确定每个格口相对应的所述目标格口位置。
31、本申请第二方面提供一种托盘格口定位检测系统,应用于3d成像相机,所述系统包括:
32、获取目标平面图模块,用于获取包含托盘格口的目标平面图;
33、确定目标候选角点集模块,用于基于所述目标平面图进行角点检测,确定目标候选角点集;
34、确定格口位置矩形集模块,用于基于所述目标候选角点集进行筛选,确定格口位置矩形集;
35、确定目标位置模块,用于基于所述格口位置矩形集进行直线拟合,并根据拟合得到的格口直线集确定每个格口相对应的目标格口位置。
36、本申请第三方面提供一种托盘格口定位检测装置,包括:
37、3d成像相机;
38、存储器和一个或多个处理器,所述存储器中存储有可执行代码,所述一个或多个处理器执行所述可执行代码时,用于实现上述所述的托盘格口定位检测方法。
39、本申请第四方面提供一种计算机可读存储介质,其上存储有程序,该程序被处理器执行时,实现上述所述的托盘格口定位检测方法。
40、本申请实施例提供的一种托盘格口定位检测方法、系统、装置及介质至少具有以下技术效果。
41、通过使用基于3d成像相机的结构光方法获取包含托盘格口的目标平面图,随后进行角点检测和筛选,以确定目标平面图中包含的托盘格口。最后,利用所得格口位置矩形集进行直线拟合,并根据拟合得到的格口直线集确定每个格口相对应的目标格口位置。本申请能够稳定地确定被测托盘格口的三维信息,并具有更好的稳定性。
42、本申请的一个或多个实施例的细节在以下附图和描述中提出,以使本申请的其他特征、目的和优点更加简明易懂。
技术特征:
1.一种托盘格口定位检测方法,其特征在于,应用于3d成像相机,所述方法包括:
2.根据权利要求1所述的托盘格口定位检测方法,其特征在于,所述获取包含托盘格口的目标平面图,包括:
3.根据权利要求2所述的托盘格口定位检测方法,其特征在于,所述基于所述三维点云数据进行预处理,得到目标托盘图像,包括:
4.根据权利要求2所述的托盘格口定位检测方法,其特征在于,所述基于所述目标托盘图像进行投影,得到所述目标平面图,包括:
5.根据权利要求1所述的托盘格口定位检测方法,其特征在于,所述基于所述目标平面图进行角点检测,确定目标候选角点集,包括:
6.根据权利要求1所述的托盘格口定位检测方法,其特征在于,所述基于所述目标候选角点集进行筛选,确定格口位置矩形集,包括:
7.根据权利要求1所述的托盘格口定位检测方法,其特征在于,所述基于所述格口位置矩形集进行直线拟合,并根据拟合得到的格口直线集确定每个格口相对应的目标格口位置,包括:
8.一种托盘格口定位检测系统,其特征在于,应用于3d成像相机,所述系统包括:
9.一种托盘格口定位检测装置,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,其上存储有程序,该程序被处理器执行时,实现权利要求1-7中任一项所述的托盘格口定位检测方法。
技术总结
本发明公开了一种托盘格口定位检测方法、系统、装置及介质,包括:获取包含托盘格口的目标平面图;基于所述目标平面图进行角点检测,确定目标候选角点集;基于所述目标候选角点集进行筛选,确定格口位置矩形集;基于所述格口位置矩形集进行直线拟合,并根据拟合得到的格口直线集确定每个格口相对应的目标格口位置。本申请通过使用基于3D成像相机的结构光方法获取包含托盘格口的目标平面图,随后进行角点检测和筛选,以确定目标平面图中包含的托盘格口。最后,利用所得格口位置矩形集进行直线拟合,并根据拟合得到的格口直线集确定每个格口相对应的目标格口位置。本申请能够稳定地确定被测托盘格口的三维信息,并具有更好的稳定性。
技术研发人员:付伟男,王磊,卢锐佳
受保护的技术使用者:杭州灵西机器人智能科技有限公司
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!