一种基于视觉的地质调查中裂缝轮廓提取方法与流程
本发明涉及地质图像轮廓提取,具体涉及一种基于视觉的地质调查中裂缝轮廓提取方法。
背景技术:
1、地质调查是研究地球表面地质结构和地质演化的基础性工作。裂缝是地壳中常见的构造特征,对地质调查具有重要意义。裂缝轮廓提取是地质调查中的一个关键步骤,可以有效地识别出裂缝的位置、形态和长度等信息,为后续的地质研究提供重要的数据支持。然而,传统的地质调查方法往往需要耗费大量的人力、物力和时间,且无法实现对大规模地质区域的快速、高效、准确的勘探。因此,如何利用计算机视觉技术实现裂缝轮廓提取,提高地质调查的效率和精度,具有重要的理论和实际意义。
2、采集的地质图像除了噪声以外,还会出现由于地壳挤压导致裂缝周围产生一定程度的截面,而截面不属于正常的裂缝特征。又因为截面的灰度值特征与裂缝的灰度值特征比较相似,如果对地质图像直接进行轮廓提取,会导致轮廓提取结果有较大误差。因此首先需要对地质图像进行去噪处理,现有技术中常用非局部均值滤波进行去噪,它在计算过程中每一个待滤波点的搜素窗口的中心值都是待滤波点本身。对于地质图像而言,如果待滤波点位于裂缝区域的边缘时,以待滤波点本身构建搜索窗口时会导致正常地面的大部分像素点划分在搜索窗口中,待滤波点和正常地面的灰度值混合,进而导致边缘模糊,影响轮廓提取结果。
技术实现思路
1、为了解决利用非局部均值滤波算法对地质图像进行增强时,会出现截面与裂缝像素点被划分在搜索窗口中,导致增强后的图像边缘模糊,进而影响裂缝轮廓提取效果的技术问题,本发明的目的在于提供一种基于视觉的地质调查中裂缝轮廓提取方法,所采用的技术方案具体如下:
2、一种基于视觉的地质调查中裂缝轮廓提取方法,所述方法包括:
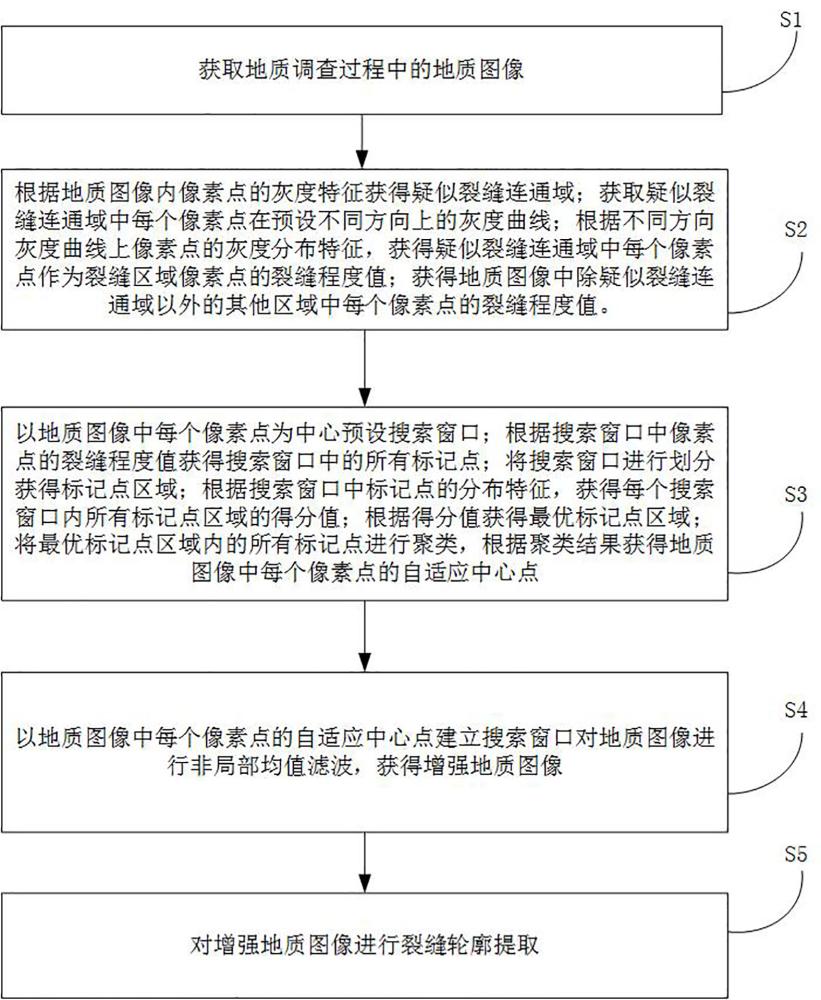
3、获取地质调查过程中的地质图像;
4、根据所述地质图像内像素点的灰度特征获得疑似裂缝连通域;获取所述疑似裂缝连通域中每个像素点在预设不同方向上的灰度曲线;根据不同方向所述灰度曲线上像素点的灰度分布特征,获得所述疑似裂缝连通域中每个像素点作为裂缝区域像素点的裂缝程度值;获得地质图像中除疑似裂缝连通域以外的其他区域中每个像素点的裂缝程度值;
5、以所述地质图像中每个像素点为中心预设搜索窗口;根据所述搜索窗口中像素点的裂缝程度值获得所述搜索窗口中的所有标记点;将所述搜索窗口进行划分获得标记点区域;根据所述搜索窗口中标记点的分布特征,获得每个搜索窗口内所有所述标记点区域的得分值;根据所述得分值获得最优标记点区域;将所述最优标记点区域内的所有标记点进行聚类,根据聚类结果获得所述地质图像中每个像素点的自适应中心点;
6、以所述地质图像中每个像素点的自适应中心点建立搜索窗口对所述地质图像进行非局部均值滤波,获得增强地质图像;
7、对所述增强地质图像进行裂缝轮廓提取。
8、进一步地,所述灰度曲线的获取方法包括:
9、将每个疑似裂缝连通域中的每个像素点作为基准像素点;获取每个疑似裂缝连通域中的每个基准像素点预设不同方向上的所有像素点的灰度值;以每个方向上每个像素点的位置作为横轴,每个方向上每个像素点的灰度值作为纵轴,获得疑似裂缝连通域内不同方向上所有像素点灰度值组成的灰度曲线。
10、进一步地,疑似裂缝连通域中每个像素点的所述裂缝程度值的获取方法包括:
11、以所述基准像素点为中心,在两个相反方向上的两个灰度波动曲线中,将灰度值均值最小的灰度波动曲线作为目标灰度波动曲线,另一个作为非目标灰度波动曲线;所述基准像素点同时存在于目标灰度波动曲线与非目标灰度波动曲线;
12、将目标灰度曲线与非目标灰度曲线组成每个基准像素点的灰度曲线;根据每条灰度曲线上目标灰度波动曲线与非目标灰度波动曲线的像素点灰度变化特征,计算所述基准像素点在每条灰度曲线上的灰度特征值;
13、将所述基准像素点在每条灰度曲线的灰度特征值求平均并进行归一化处理,获得疑似裂缝连通域中每个像素点的所述裂缝程度值。
14、进一步地,灰度特征值的获取方法包括:
15、根据灰度特征值计算公式获取所述灰度特征值,所述灰度特征值计算公式如下所示:
16、;式中,表示疑似裂缝连通域内第个像素点在第条灰度曲线上的灰度特征值;表示疑似裂缝连通域内第个像素点在第条灰度曲线上目标灰度波动曲线像素点的灰度值均值;表示疑似裂缝连通域内第个像素点的灰度值;表示疑似裂缝连通域内第个像素点在第条灰度曲线上非目标灰度波动曲线像素点的灰度值均值;表示疑似裂缝连通域内第个像素点在第条灰度曲线上目标灰度波动曲线两个端点的灰度值差异;表示疑似裂缝连通域内第个像素点在第条灰度曲线上目标灰度波动曲线两个端点连接直线的斜率;表示疑似裂缝连通域内第个像素点在第条灰度曲线上非目标灰度波动曲线两个端点的灰度值差异;表示疑似裂缝连通域内第个像素点在第条灰度曲线上非目标灰度波动曲线两个端点连接直线的斜率;表示以自然常数为底的指数函数。
17、进一步地,获得地质图像中除疑似裂缝连通域以外的其他区域中每个像素点的裂缝程度值,包括:
18、将地质图像中除疑似裂缝连通域以外的其他区域中每个像素点的裂缝程度值设置为所述疑似裂缝连通域中像素点的最小裂缝程度值的。
19、进一步地,所述标记点的获取方法包括:
20、计算每个搜索窗口中所有像素点的裂缝程度值的均值作为程度阈值;
21、当搜索窗口中心点的裂缝程度值大于所述程度阈值时,将所述搜索窗口中裂缝程度值大于所述程度阈值的所有像素点作为标记点;
22、当搜索窗口中心点的裂缝程度值小于所述程度阈值时,将所述搜索窗口中裂缝程度值小于所述程度阈值的所有像素点作为标记点。
23、进一步地,将所述搜索窗口划分为标记点区域,包括:
24、以搜索窗口中心点为中心将所述搜索窗口平均分为8个区域,将每个区域作为每个标记点区域。
25、进一步地,获得每个搜索窗口内所有所述标记点区域的得分值,包括:
26、计算搜索窗口内每个所述标记点区域的像素点裂缝程度值的平均值作为第一平均值;计算每个所述标记点区域的第一平均值与所有标记点区域内第一平均值总和之间的比值作为程度比例;
27、当搜索窗口中心点的裂缝程度值大于所述程度阈值时,将每个所述标记点区域内的标记点数量与所述程度比例之间的乘积作为每个所述标记点区域的得分值;
28、当搜索窗口中心点的裂缝程度值小于所述程度阈值时,将每个所述标记点区域的所述程度比例进行负相关映射,并与每个所述标记点区域内的标记点数量进行相乘,作为每个所述标记点区域的得分值。
29、进一步地,最优标记点区域的获取方法包括:
30、将搜索窗口中得分值最高的所述标记点区域作为最优标记点区域。
31、进一步地,根据聚类结果获得所述地质图像中每个像素点的自适应中心点,包括:
32、利用聚类算法将所述最优标记点区域内的所有标记点分为两类;将标记点数量大的聚类簇作为目标簇;将所述目标簇中标记点的裂缝程度值的平均值作为基准值;
33、将所述最优标记点区域内与所述基准值差异最小的裂缝程度值对应的标记点作为地质图像中每个像素点的自适应中心点。
34、本发明具有如下有益效果:
35、本发明获取地质调查过程中的地质图像;由于裂缝区域、截面区域与正常地质区域的灰度特征存在不同,所以根据地质图像内像素点的灰度特征对地质图像进行阈值分割,获得疑似裂缝连通域;为了对裂缝区域与截面区域作出区分,需要对每个疑似裂缝连通域的每个像素点有关的灰度波动情况进行分析,所以获取疑似裂缝连通域中每个像素点在预设不同方向上的灰度曲线;获得地质图像中每个像素点的裂缝程度值,裂缝程度值能够直接反映不同区域像素点的灰度特征;以地质图像中每个像素点为中心预设搜索窗口;将与搜索窗口中心点的裂缝程度值的特征相似的像素点作为标记点,根据搜索窗口中像素点的裂缝程度值获得搜索窗口中的所有标记点;将搜索窗口进行划分获得标记点区域;根据搜索窗口中标记点的分布特征,获得每个搜索窗口内所有标记点区域的得分值,不同标记点区域的得分值可以通过搜索窗口中心点的裂缝程度值的特征以及与中心点裂缝程度值特征相似的像素点分布,寻找到最有可能存在自适应中心点的最优标记点区域;将最优标记点区域内的所有标记点进行聚类,根据聚类结果获得地质图像中每个像素点的自适应中心点,自适应中心点可以保证搜索窗口中可以尽可能多地包含裂缝区域的灰度信息,降低截面区域像素点与裂缝区域像素点融合的概率,提高滤波的效果;以地质图像中每个像素点的自适应中心点建立搜索窗口对地质图像进行非局部均值滤波,获得增强地质图像;对增强地质图像进行裂缝轮廓提取。本发明能够获得地质图像中每个像素点的自适应中心点来建立搜索窗口以获得去噪效果良好,且图像特征清晰的增强地质图像,提高了裂缝轮廓提取的准确性。
- 还没有人留言评论。精彩留言会获得点赞!