一种基于点云数据的安全监控系统及方法与流程
本发明涉及点云数据处理,更具体地说,它涉及一种基于点云数据的安全监控系统及方法。
背景技术:
1、目前施工现场的安全监控主要依赖于视频监控,然而视频监控存在以下缺陷:1.视频监控通常依赖人工观察施工现场,然而人工观察监控视频不仅需要大量的人力资源,而且在观察的过程中监控人员还容易出现疲劳状态,导致无法及时发现施工现场的安全隐患;2.视频监控依赖人工主观意识判断施工现场是否存在安全隐患,然而不同监控人员的安全意识也不相同,对施工现场的安全情况的判断存在差异,同样容易造成监控人员忽略施工现场的安全隐患;3.视频监控容易受到环境因素的影响,例如夜间光线较弱影响人工观察,或者存在障碍物遮挡目标物体的情况,导致无法判断被遮挡部分的目标物体的安全情况。
2、因此亟需一种安全监控系统以解决上述问题。
技术实现思路
1、本发明提供一种基于点云数据的安全监控系统及方法,解决上述背景技术中的技术问题。
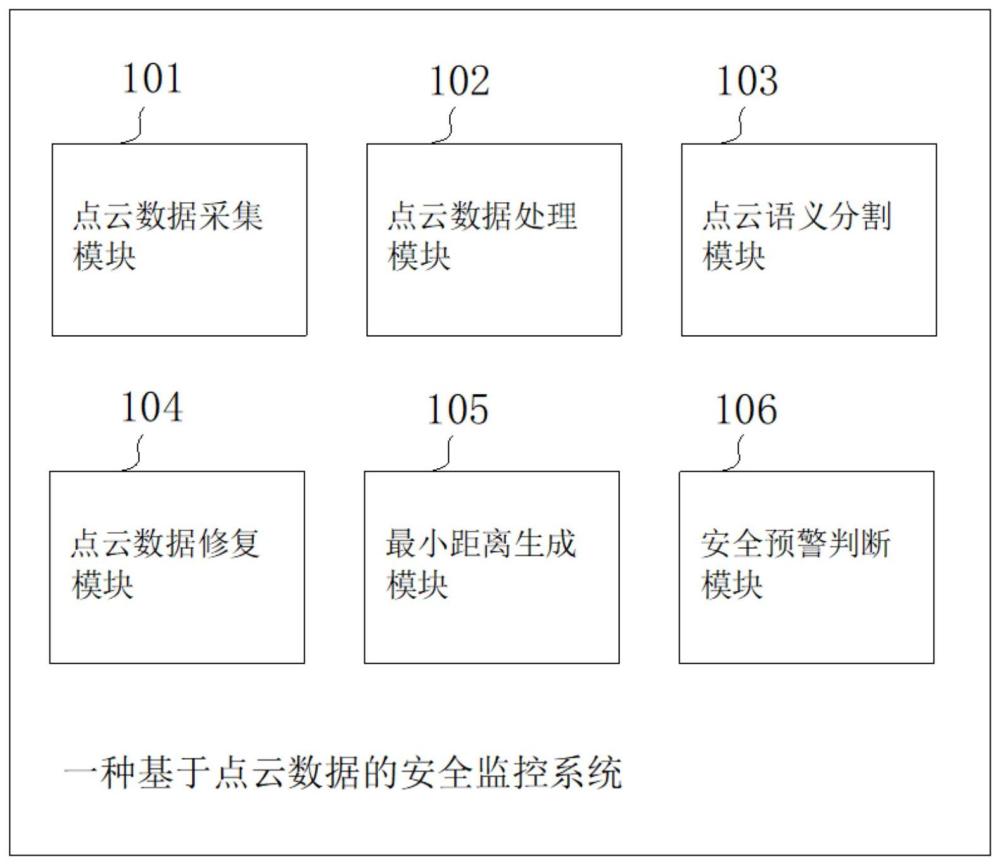
2、本发明提供了一种基于点云数据的安全监控系统,包括:
3、点云数据采集模块,其用于采集施工现场的三维点云数据;
4、三维点云数据的每个数据点通过笛卡尔三维坐标系的x轴分量值、y轴分量值和z轴分量值表示:
5、点云数据处理模块,其用于将施工现场的三维点云数据进行处理获得第一点云数据;第一点云数据的每个数据点和三维点云数据的每个数据点的表示相同;
6、点云语义分割模块,其用于将第一点云数据进行语义分割获得由不同语义单位组成的待修复点云数据;待修复点云数据的每个语义单位的每个数据点通过笛卡尔三维坐标系的x轴分量值、y轴分量值、z轴分量值、物体类型标签和遮挡标签表示;物体类型标签包括:施工车辆、施工人员和施工设备;遮挡标签通过0或者1表示,其中0表示数据点不存在遮挡,1表示数据点存在遮挡;
7、点云数据修复模块,其用于将待修复点云数据输入点云数据修复模型,输出已修复点云数据;已修复点云数据的每个语义单位的每个数据点与修复点云数据的每个语义单位的每个数据点的表示相同;已修复点云数据的每个数据点的遮挡标签都通过0来表示;
8、最小距离生成模块,其用于根据已修复点云数据计算获得相邻的语义单位对应的数据点之间的最小距离;
9、安全预警判断模块,其用于判断当相邻的语义单位对应的数据点之间的最小距离小于安全距离阈值,则采取安全预警措施。
10、进一步地,三维点云数据进行处理获得第一点云数据,包括以下步骤:
11、步骤s201,通过高斯滤波器去除三维点云数据中的噪声点;
12、步骤s202,通过将去噪后的三维点云数据进行网格化划分,获得m个同样大小的子区域,对每个子区域生成一个随机数,表示该子区域所保留数据点的数量,随机数的取值范围为1到去噪后的三维点云数据的密度值之间,当该子区域的数据点的数量小于等于该随机数,则直接保留该子区域的所有数据点,当该子区域的数据点的数量大于该随机数,则保留该子区域的随机数个的数据点,直至遍历完每个子区域获得第一点云数据,其中m为自定义参数。
13、进一步地,将第一点云数据输入到三维点云语义分割模型获得由不同语义单位组成的待修复点云数据,三维点云语义分割模型的训练样本的样本标签与物体类型标签相同。
14、进一步地,获取待修复点云数据的每个语义单位的每个数据点的遮挡标签,包括以下步骤:
15、步骤s301,判断当待修复点云数据的每个语义单位的物体类型标签为施工车辆的数据点的总数小于第一总数阈值,则该语义单位的数据点的遮挡标签通过1来表示,否则通过0来表示,所述第一总数阈值为自定义参数;
16、步骤s302,判断当待修复点云数据的每个语义单位的物体类型标签为施工人员的数据点的总数小于第二总数阈值,则该语义单位的数据点的遮挡标签通过1来表示,否则通过0来表示,所述第二总数阈值为自定义参数;
17、步骤s303,判断当待修复点云数据的每个语义单位的物体类型标签为施工设备的数据点的总数小于第三总数阈值,则该语义单位的数据点的遮挡标签通过1来表示,否则通过0来表示,所述第三总数阈值为自定义参数;
18、步骤s304,重复步骤s301~步骤s303,直至遍历完待修复点云数据的每个语义单位。
19、进一步地,点云数据修复模型的训练过程中连接一个判别器,点云数据修复模型和判别器联合对抗训练的损失函数的计算公式包括:
20、点云数据修复模型的损失函数gloss的计算公式如下:
21、gloss=-log(d(g(a))),其中a表示待修复点云数据,g(a)表示输入待修复点云数据到点云数据修复模型输出的已修复点云数据,d(g(a))表示输入已修复点云数据到判别器输出的已修复点云数据属于真实点云数据的概率值;
22、判别器的损失函数dloss的计算公式如下:
23、dloss=-log(d(b))-log(1-d(g(a))),其中a表示待修复点云数据,b表示真实点云数据,g(a)表示输入待修复点云数据到点云数据修复模型输出的已修复点云数据,d(g(a))表示输入已修复点云数据到判别器输出的已修复点云数据属于真实点云数据的概率值,d(b)表示输入真实点云数据到判别器输出的真实点云数据属于真实点云数据的概率值;
24、判别器输出的已修复点云数据属于真实点云数据的概率值per的计算公式如下:其中u表示已修复点云数据或者真实点云数据中语义单位的总数,v表示已修复点云数据或者真实点云数据中语义单位的数据点的总数,表示已修复点云数据的第i个语义单位的第j个数据点的x轴分量值、y轴分量值和z轴分量值,表示真实点云数据的第i个语义单位的第j个数据点的x轴分量值、y轴分量值和z轴分量值,表示已修复点云数据的第i个语义单位的数据点的数量,表示真实点云数据的第i个语义单位的数据点的数量,σ表示sigmoid激活函数。
25、进一步地,根据已修复点云数据计算获得相邻的语义单位对应的数据点之间的最小距离,包括以下步骤:
26、步骤s401,通过排序算法确定已修复点云数据中每个语义单位的8个顶点坐标,并构建每个语义单位的立方体表示;
27、步骤s402,计算每个语义单位的立方体表示的前面、后面、左面和右面的4个平面的中心点,其中一个平面的中心点的笛卡尔三维坐标系的x轴分量值、y轴分量值和z轴分量值即为所在该平面的4个顶点的笛卡尔三维坐标系的x轴分量值、y轴分量值和z轴分量值的平均值;
28、步骤s403,计算相邻的两个语义单位的立方体的4个平面的中心点之间的欧式距离,并选择其中欧式距离的最小值作为相邻的两个语义单位之间的最小距离。
29、进一步地,相邻的语义单位对应的数据点之间的最小距离包括:施工车辆与施工车辆之间的最小距离、施工车辆与施工人员之间的最小距离,施工车辆与施工设备之间的最小距离和施工人员与施工设备之间的最小距离。
30、进一步地,安全距离阈值包括:施工车辆与施工车辆之间的第一安全距离阈值、施工车辆与施工人员之间的第二安全距离阈值、施工车辆与施工设备之间的第三安全距离阈值和施工人员与施工设备之间的第四安全距离阈值,所述第一安全距离阈值、第二安全距离阈值、第三安全距离阈值和第四安全距离阈值均为自定义参数。
31、进一步地,安全预警措施包括:通过在施工现场设置警示灯或者语音报警装置来提示施工现场的施工人员;通过将安全预警信号发送至施工现场的负责人或者发送至后台监控人员,由后台监控人员联系施工现场的负责人前往施工现场来提示施工现场的施工人员。
32、本发明提供一种基于点云数据的安全监控方法用于执行上述的一种基于点云数据的安全监控系统,包括以下步骤:步骤s501,采集施工现场的三维点云数据;
33、步骤s502,将施工现场的三维点云数据进行处理获得第一点云数据;
34、步骤s503,将第一点云数据进行语义分割获得由不同语义单位组成的待修复点云数据;待修复点云数据的每个语义单位的每个数据点通过笛卡尔三维坐标系的x轴分量值、y轴分量值、z轴分量值、物体类型标签和遮挡标签表示;物体类型标签包括:施工车辆、施工人员和施工设备;遮挡标签通过0或者1表示,其中0表示数据点不存在遮挡,1表示数据点存在遮挡;
35、步骤s504,将待修复点云数据输入点云数据修复模型,输出已修复点云数据;已修复点云数据的每个语义单位的每个数据点与修复点云数据的每个语义单位的每个数据点的表示相同;已修复点云数据的每个数据点的遮挡标签都通过0来表示;
36、步骤s505,根据已修复点云数据计算获得相邻的语义单位对应的数据点之间的最小距离;
37、步骤s506,判断当相邻的语义单位对应的数据点之间的最小距离小于安全距离阈值,则采取安全预警措施。
38、本发明的有益效果在于:本发明通过联合对抗训练来生成目标物体的被遮挡部分,通过语义分割确定语义单位,并通过计算相邻的语义单位的立方体的每个面的中心点之间的最小的欧式距离作为相邻的语义单位之间的最小距离,最后通过设定安全距离阈值来判断是否采取安全预警措施,从而保障施工现场的安全。
- 还没有人留言评论。精彩留言会获得点赞!