停车区生成方法、装置、计算机设备和存储介质与流程
本技术涉及人工智能,特别是涉及一种停车区生成方法、装置、计算机设备、存储介质和计算机程序产品。
背景技术:
1、随着共享经济的发展,共享车辆入驻越来越多的城市。在运营共享车辆的过程中,共享车辆的管理的重要性不言而喻。为了避免用户乱停乱放,也为了方便管理共享车辆,一般会划定停车区。只有将共享车辆停放至停车区,用户才能还车成功。
2、然而,传统的停车区生成方法中,主要依靠工作人员的个人经验,人工确定停车区的位置和范围。因此,传统的停车区生成方法需要耗费大量的时间,效率低下。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高效率的停车区生成方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种停车区生成方法,包括:
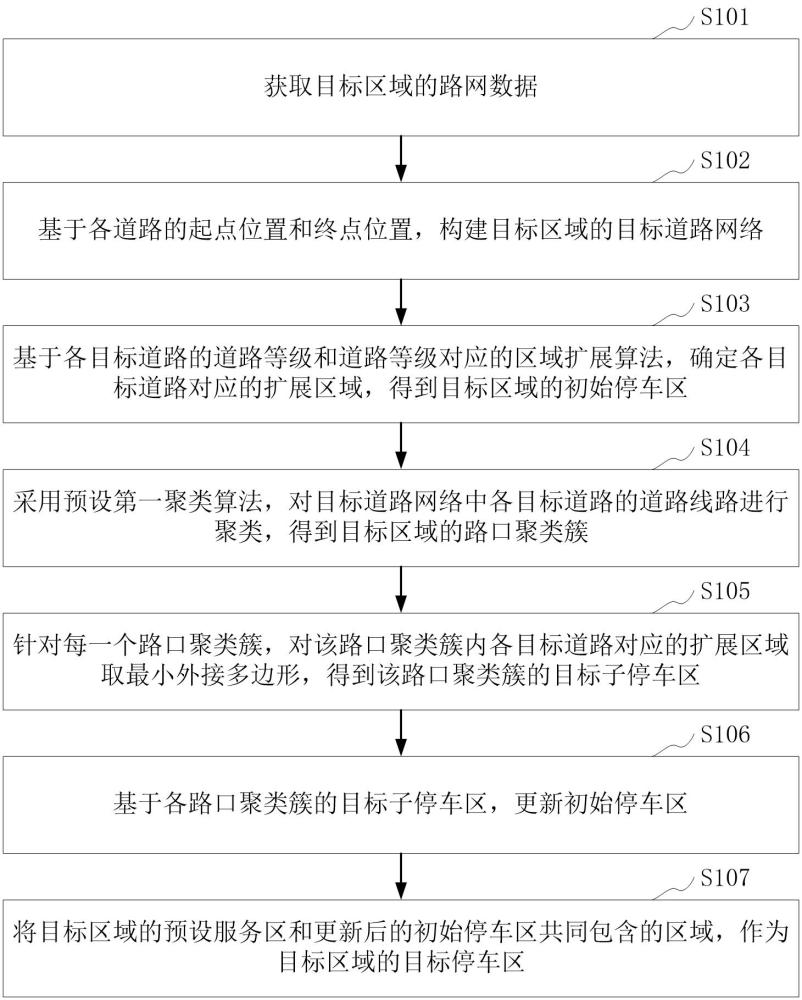
3、获取目标区域的路网数据;所述路网数据包括各道路的起点位置、终点位置和道路等级;
4、基于所述各道路的起点位置和终点位置,构建所述目标区域的目标道路网络;所述目标道路网络包含所述各道路中目标道路的道路线路;
5、基于各所述目标道路的道路等级和所述道路等级对应的区域扩展算法,确定各所述目标道路对应的扩展区域,得到所述目标区域的初始停车区;
6、采用预设第一聚类算法,对所述目标道路网络中各所述目标道路的道路线路进行聚类,得到所述目标区域的路口聚类簇;
7、针对每一个路口聚类簇,对所述路口聚类簇内各所述目标道路对应的扩展区域取最小外接多边形,得到所述路口聚类簇的目标子停车区;
8、基于各所述路口聚类簇的目标子停车区,更新所述初始停车区;
9、将所述目标区域的预设服务区和更新后的初始停车区共同包含的区域,作为所述目标区域的目标停车区。
10、在其中一个实施例中,所述基于所述各道路的起点位置和终点位置,构建所述目标区域的目标道路网络,包括:
11、根据所述各道路的起点位置和终点位置,构建所述目标区域的各备选道路的道路线路;
12、基于所述各备选道路的道路线路,确定所述目标区域的目标道路网络。
13、在其中一个实施例中,所述根据所述各道路的起点位置和终点位置,构建所述目标区域的各备选道路的道路线路,包括:
14、确定道路等级满足预设筛选条件的道路,作为备选道路;
15、针对每一个备选道路,连接所述备选道路的起点位置和终点位置,得到所述备选道路的道路线路。
16、在其中一个实施例中,所述基于所述各备选道路的道路线路,确定所述目标区域的目标道路网络,包括:
17、基于所述各备选道路的起点位置、终点位置和道路线路,在所述各备选道路的道路线路中,确定非联通线路;
18、根据除非联通线路以外的所述各备选道路的道路线路,确定所述目标区域的目标道路网络。
19、在其中一个实施例中,所述方法还包括:
20、针对每一个兴趣点,在预设的兴趣点和禁停影响范围的映射关系中,查询所述兴趣点对应的禁停影响范围;
21、基于所述兴趣点的位置和所述兴趣点对应的禁停影响范围,确定所述兴趣点对应的禁停子区域;
22、将所述目标停车区中除各所述兴趣点对应的禁停子区域以外的区域,作为更新后的目标停车区。
23、在其中一个实施例中,所述方法还包括:
24、获取预设历史时间段内的违停订单信息;所述违停订单信息包括违停位置;
25、采用预设第二聚类算法,对各所述违停位置进行聚类,得到多个违停位置集合;
26、针对每一个违停位置集合,将所述违停位置集合的最小外接多边形,作为所述违停位置集合对应的违停子区域;
27、基于各所述违停位置集合对应的违停子区域,更新所述目标区域的目标停车区。
28、在其中一个实施例中,所述方法还包括:
29、获取目标事件信息;所述目标事件信息包括事件标识和事件时间;
30、基于所述事件标识,确定所述目标事件信息对应的临时禁停区;
31、在所述事件时间,基于所述临时禁停区,更新所述目标区域的目标停车区。
32、第二方面,本技术还提供了一种停车区生成装置,包括:
33、第一获取模块,用于获取目标区域的路网数据;所述路网数据包括各道路的起点位置、终点位置和道路等级;
34、构建模块,用于基于所述各道路的起点位置和终点位置,构建所述目标区域的目标道路网络;所述目标道路网络包含所述各道路中目标道路的道路线路;
35、第一确定模块,用于基于各所述目标道路的道路等级和所述道路等级对应的区域扩展算法,确定各所述目标道路对应的扩展区域,得到所述目标区域的初始停车区;
36、第一聚类模块,用于采用预设第一聚类算法,对所述目标道路网络中各所述目标道路的道路线路进行聚类,得到所述目标区域的路口聚类簇;
37、第二确定模块,用于针对每一个路口聚类簇,对所述路口聚类簇内各所述目标道路对应的扩展区域取最小外接多边形,得到所述路口聚类簇的目标子停车区;
38、第一更新模块,用于基于各所述路口聚类簇的目标子停车区,更新所述初始停车区;
39、第三确定模块,用于将所述目标区域的预设服务区和更新后的初始停车区共同包含的区域,作为所述目标区域的目标停车区。
40、在其中一个实施例中,所述构建模块,具体用于:
41、根据所述各道路的起点位置和终点位置,构建所述目标区域的各备选道路的道路线路;
42、基于所述各备选道路的道路线路,确定所述目标区域的目标道路网络。
43、在其中一个实施例中,所述构建模块,具体用于:
44、确定道路等级满足预设筛选条件的道路,作为备选道路;
45、针对每一个备选道路,连接所述备选道路的起点位置和终点位置,得到所述备选道路的道路线路。
46、在其中一个实施例中,所述构建模块,具体用于:
47、基于所述各备选道路的起点位置、终点位置和道路线路,在所述各备选道路的道路线路中,确定非联通线路;
48、根据除非联通线路以外的所述各备选道路的道路线路,确定所述目标区域的目标道路网络。
49、在其中一个实施例中,所述装置还包括:
50、查询模块,用于针对每一个兴趣点,在预设的兴趣点和禁停影响范围的映射关系中,查询所述兴趣点对应的禁停影响范围;
51、第四确定模块,用于基于所述兴趣点的位置和所述兴趣点对应的禁停影响范围,确定所述兴趣点对应的禁停子区域;
52、第二更新模块,用于将所述目标停车区中除各所述兴趣点对应的禁停子区域以外的区域,作为更新后的目标停车区。
53、在其中一个实施例中,所述装置还包括:
54、第二获取模块,用于获取预设历史时间段内的违停订单信息;所述违停订单信息包括违停位置;
55、第二聚类模块,用于采用预设第二聚类算法,对各所述违停位置进行聚类,得到多个违停位置集合;
56、第五确定模块,用于针对每一个违停位置集合,将所述违停位置集合的最小外接多边形,作为所述违停位置集合对应的违停子区域;
57、第三更新模块,用于基于各所述违停位置集合对应的违停子区域,更新所述目标区域的目标停车区。
58、在其中一个实施例中,所述装置还包括:
59、第三获取模块,用于获取目标事件信息;所述目标事件信息包括事件标识和事件时间;
60、第六确定模块,用于基于所述事件标识,确定所述目标事件信息对应的临时禁停区;
61、第四更新模块,用于在所述事件时间,基于所述临时禁停区,更新所述目标区域的目标停车区。
62、第三方面,本技术还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述第一方面所述的步骤。
63、第四方面,本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面所述的步骤。
64、第五方面,本技术还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述第一方面所述的步骤。
65、上述停车区生成方法、装置、计算机设备、存储介质和计算机程序产品,获取目标区域的路网数据;所述路网数据包括各道路的起点位置、终点位置和道路等级;基于所述各道路的起点位置和终点位置,构建所述目标区域的目标道路网络;所述目标道路网络包含所述各道路中目标道路的道路线路;基于各所述目标道路的道路等级和所述道路等级对应的区域扩展算法,确定各所述目标道路对应的扩展区域,得到所述目标区域的初始停车区;采用预设第一聚类算法,对所述目标道路网络中各所述目标道路的道路线路进行聚类,得到所述目标区域的路口聚类簇;针对每一个路口聚类簇,对所述路口聚类簇内各所述目标道路对应的扩展区域取最小外接多边形,得到所述路口聚类簇的目标子停车区;基于各所述路口聚类簇的目标子停车区,更新所述初始停车区;将所述目标区域的预设服务区和更新后的初始停车区共同包含的区域,作为所述目标区域的目标停车区。这样,基于目标区域的路网数据,构建由目标道路的道路线路构成的目标道路网络,再基于道路等级,对各道路线路进行扩展,确定各目标道路对应的扩展区域,并用路口聚类簇对应的扩展区域的最小外接多边形代替该部分扩展区域,再将预设服务区和更新后的扩展区域共同包含的区域作为目标停车区自动确定目标区域的目标停车区,无需依赖人工,耗费时间短,能够提高停车区生成的效率。
- 还没有人留言评论。精彩留言会获得点赞!