一种基于无人机的电力线路全景图像生成方法及系统与流程
本发明属于数据处理,具体涉及一种基于无人机的电力线路全景图像生成方法及系统。
背景技术:
1、随着电网信息化建设的不断发展和深入开展精细化管理需求,电网系统越来越重视全景信息的综合展现,在电力线路监测方面,构建全景图像有助于工作人员了解电力线整体布局,并监测电力线路和电线支架的情况,及时发现异常。
2、现有技术中,比如中国专利申请cn115150548a,公开了一种基于云台输出输电线路全景图像的方法、设备及介质,获取云台的当前位置,并响应于输电线路中全景图像的输出指令,确定云台从当前位置旋转到指定位置对应的旋转指令,向云台下发对应的旋转指令,控制云台按照预设角度进行旋转录像,获取云台旋转录制的图像,并对图像进行拼接处理,得到输电线路对应的全景图像。再比如中国专利申请cn117078513a,公开了全景图像生成方法、装置及存储介质,将待生成全景图像按照纬度划分为n个子区域,其中,不同的子区域之间的纬度范围不同,对待生成全景图像配置映射表,获取原始图像;根据所有目标映射规则、所有目标插值规则和原始图像生成全景图像。
3、上述两种方法均是通过摄像设备拍摄图像,对拍摄到的图像进行拼接生成全景图像。通过拍摄图像的方法生成全景图像,需要提前规划并设置多个拍摄点,并安装摄像头,耗时耗力增加花费,且还具有操作过程繁琐、拍摄质量不佳等问题,这些问题的存在急迫地需要采用更加现代化的手段,进一步提升全景信息展现水平。
4、近年来,随着国家无人机行业的不断发展,无人机得到了越来越多的应用,通过无人机进行空中摄影也得到了快速发展。因此,提供一种基于无人机的电力线路全景图像生成方法及系统,以提高生成电力线路全景图像的准确率和效率,是亟待解决的问题。
技术实现思路
1、针对上述提出的技术问题,本发明提供一种基于无人机的电力线路全景图像生成方法及系统。
2、第一方面,本发明提供了一种基于无人机的电力线路全景图像生成方法,该方法包括:
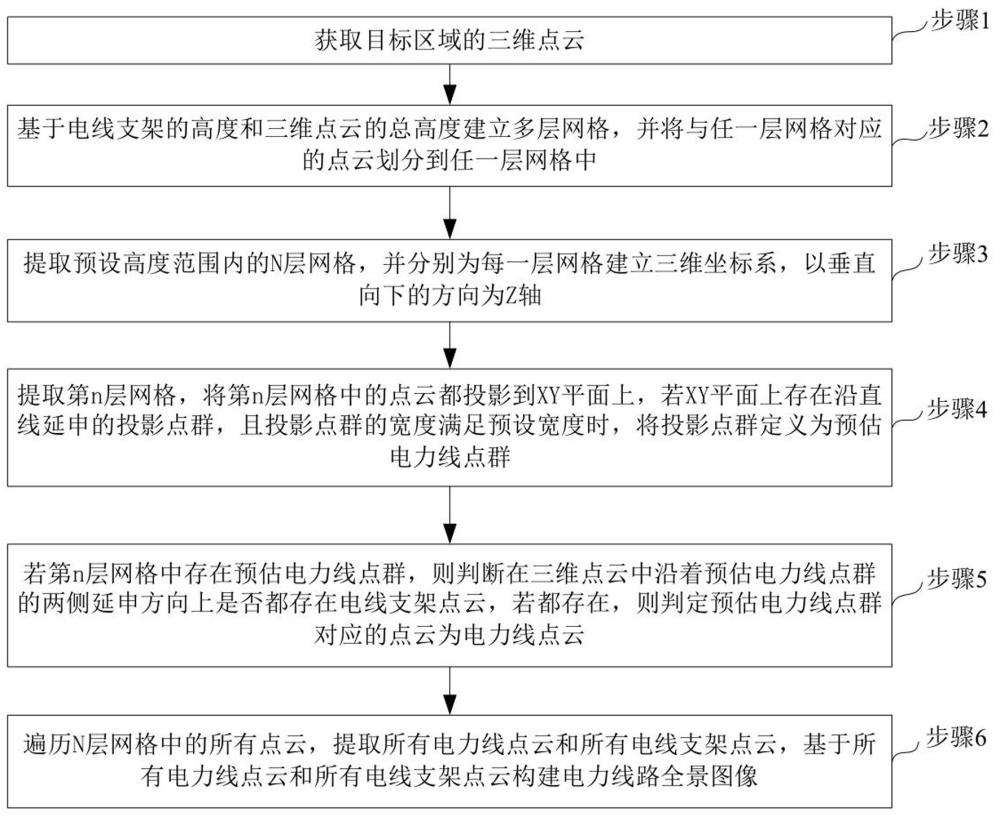
3、步骤1、获取目标区域的三维点云;
4、步骤2、基于电线支架的高度和三维点云的总高度建立多层网格,并将与任一层网格对应的点云划分到任一层网格中;
5、步骤3、提取预设高度范围内的n层网格,并分别为每一层网格建立三维坐标系,以垂直向下的方向为z轴;
6、步骤4、提取第n层网格,将第n层网格中的点云都投影到xy平面上,若xy平面上存在沿直线延申的投影点群,且投影点群的宽度满足预设宽度时,将投影点群定义为预估电力线点群,其中,n为1~n的正整数;
7、步骤5、若第n层网格中存在预估电力线点群,则判断在三维点云中沿着预估电力线点群的两侧延申方向上是否都存在电线支架点云,若都存在,则判定预估电力线点群对应的点云为电力线点云;
8、步骤6、遍历n层网格中的所有点云,提取所有电力线点云和所有电线支架点云,基于所有电力线点云和所有电线支架点云构建电力线路全景图像。
9、具体地,步骤1包括:
10、步骤11、获取通过无人机从高空对目标区域进行扫描得到的第一高空激光雷达点云,并获取从地面对目标区域进行扫描得到的第一地面激光雷达点云;
11、步骤12、基于第一高空激光雷达点云和第一地面激光雷达点云计算点云调整密度,点云调整密度的计算公式为: ,
12、其中,为所述点云调整密度,k1和k2为参数权重系数,k1+k2=1,为所述第一高空激光雷达点云的密度,为所述第一地面激光雷达点云的密度;
13、步骤13、基于第一高空激光雷达点云中高空激光雷达点的三维坐标,获取第一地面激光雷达点云中与任一高空激光雷达点位于同一平面,且距离小于等于预设距离a1的地面激光雷达点,遍历完所有高空激光雷达点后获取第二地面激光雷达点云;
14、步骤14、基于点云调整密度对第一高空激光雷达点云的密度进行调整得到第二高空激光雷达点云,并基于点云调整密度对第二地面激光雷达点云的密度进行调整得到第三地面激光雷达点云,随后将第三地面激光雷达点云添加到第二高空激光雷达点云中以生成修正点云;
15、步骤15、当修正点云中与任一高空激光雷达点位于同一平面,且距离小于等于预设距离a2的范围内存在地面激光雷达点时,删除预设距离a2范围内存在地面激光雷达点,遍历完所有高空激光雷达点后生成三维点云,其中,a2<a1。
16、具体地,电线支架包括m类,网格层数为m+2,步骤2中,基于电线支架的高度和三维点云的总高度建立多层网格包括:
17、步骤21、基于电线支架的高度将m类电线支架进行升序排序;
18、步骤22、根据第1类电线支架的高度计算第2个网格下边线距离地面的高度,计算公式为:,
19、其中,hgl2为所述第2个网格下边线距离地面的高度,为参数权重系数,,he1为所述第1类电线支架的高度;
20、步骤23、根据第m类电线支架的高度计算第m+1个网格下边线距离地面的高度,第m+1个网格下边线距离地面的高度满足如下公式:,且,
21、其中,hglm+1为所述第m+1个网格下边线距离地面的高度,为参数权重系数,,hem为所述第m类电线支架的高度,hem-1为所述第m-1类电线支架的高度,m为2~m的正整数;
22、步骤24、根据第m类电线支架的高度计算第m+1个网格上边线距离地面的高度,计算公式为:,
23、其中,hgm+1为所述第m+1个网格上边线距离地面的高度,为参数权重系数,。
24、具体地,步骤4中,若xy平面上存在沿直线延申的投影点群,且投影点群的宽度满足预设宽度时,将与投影点群对应的点云投影到与投影点群延申方向平行的平面上,获取第二投影点群,若第二投影点群的高度满足预设高度时,将投影点群定义为预估电力线点群。
25、具体地,步骤5包括:
26、步骤51、获取预估电力线点群的外接矩形,将外接矩形的长度作为预估电力线点群的长度;
27、步骤52、基于预估电力线点群的长度计算搜索半径,计算公式为:,
28、其中,rs为搜索半径,l为预估电力线点群的长度,β为参数权重系数,r为基于预估电力线点群所在网格设置的预设半径;
29、步骤53、将外接矩形垂直于宽边的中分线定义为第一中分线,以外接矩形两端的宽边中点为起始点,分别在外接矩形两侧生成半径为搜索半径,夹角为预设角度,第一中分线为夹角平分线的搜索区域,在搜索区域内判断是否存在电线支架点云。
30、具体地,步骤53中,在搜索区域内判断是否存在电线支架点云包括:
31、步骤531、判断三维点云中两侧的搜索区域内是否都存在柱状点云,若都存在,则获取每个柱状点云的点云高度;
32、步骤532、基于预估电力线点群所在的网格层数,获取与预估电力线点群对应的电线支架的支架高度,并获取与预估电力线点群对应的电线支架的支架间距;
33、步骤533、基于支架高度,分别判断两侧的柱状点云中是否都存在满足支架高度的柱状点云,若都存在,则将满足支架高度的柱状点云定义为第一柱状点云;
34、步骤534、判断两侧的第一柱状点云之间的距离是否满足支架间距,若满足,则判定在三维点云中沿着预估电力线点群的两侧延申方向上都存在电线支架点云,满足支架间距的第一柱状点云为与预估电力线点群对应的电线支架点云。
35、具体地,步骤1之前包括:
36、以无人机行驶方向为第一方向,第一激光雷达发射器以第一方向为轴,按照预设旋转角度在垂直于第一方向的平面上旋转并发射激光,其中,第一激光雷达发射器安装在无人机尾部或前方;
37、获取基于第一激光雷达发射器发射激光得到的高空激光雷达点云,提取与第一激光雷达发射器直线距离在第一预设距离范围内的第一激光雷达点,并依次连接第一激光雷达点,生成无人机实时路线;
38、基于无人机实时路线调整无人机的飞行路线。
39、第二方面,本发明还提供了一种基于无人机的电力线路全景图像生成系统,该系统包括:点云获取模块、网格划分模块、数据提取模块、数据分析模块和图像建立模块;
40、点云获取模块,用于获取目标区域的三维点云;
41、网格划分模块,用于根据电线支架的高度和三维点云的总高度建立多层网格,并将与任一层网格对应的点云划分到任一层网格中;
42、数据提取模块,用于提取预设高度范围内的n层网格,并分别为每一层网格建立三维坐标系,以垂直向下的方向为z轴;
43、数据分析模块,用于提取第n层网格,将第n层网格中的点云都投影到xy平面上,若xy平面上存在沿直线延申的投影点群,且投影点群的宽度满足预设宽度时,将投影点群定义为预估电力线点群,其中,n为1~n的正整数;若第n层网格中存在预估电力线点群,则判断在三维点云中沿着预估电力线点群的两侧延申方向上是否都存在电线支架点云,若都存在,则判定预估电力线点群对应的点云为电力线点云;
44、图像建立模块,用于遍历n层网格中的所有点云,提取所有电力线点云和所有电线支架点云,基于所有电力线点云和所有电线支架点云构建电力线路全景图像。
45、根据本发明技术方案,先对三维点云按层进行分格,随后提取预设高度范围内的n层网格,并逐格进行分析,根据在任一格中获取的沿直线延申的投影点群来获取该网格中的疑似电力线点云,再通过判断该疑似电力线点云两侧是否都存在电力线支架点云来判断该疑似电力线点云是否是正确的电力线点云,遍历n层网格中的所有点云,提取所有电力线点云和所有电线支架点云,基于所有电力线点云和所有电线支架点云构建电力线路全景图像。通过本发明的技术方案,能够提高无人机全景图像的处理效率,提高生成电力线路全景图像的准确率和效率。
- 还没有人留言评论。精彩留言会获得点赞!