基于视频扫描河流表面流量测量方法及测量装置与流程
本发明涉及水文测流,具体涉及一种基于视频扫描河流表面流量测量方法及测量装置。
背景技术:
1、天然河道与人工渠道中的水流监测是防范山洪等地质灾害的重要监测手段。视频测流是一种利用视频技术来测量水流速度和流量的方法。它基于图像处理和分析技术,通过捕捉水面上的特征点或纹理变化,进而估算出水流的速度和流量,现有技术如专利文献cn110530441a、cn112686204a、cn117058219a等都提供了相应的视频测流方法。对于窄水面,流速分布可能相对均匀,摄像头可以更容易地捕捉到整个断面的水流情况,使得视频测流的测量结果更为稳定可靠;但是,面对宽河道时,视频测流方式会存在以下几点更加深刻和复杂的问题:1、目前用于视频测流的各种算法在计算和分析流速时,都无法很好地应对整个河道的全部流速范围,难以给出一个全面和准确的测量结果;2、由于视频拍摄画面的固定性质,一般无法同时捕捉较宽河流断面的全部流动情况,这对于进行全面和准确的测流工作是一大挑战。此外,由于河道较宽,光线和视角的限制也会对视频画面的质量和分辨率产生一定影响,从而降低了测流的准确度。
2、总体来说,面对宽河流,当前视频测流方式和算法的应用还存在一定局限性,需要进一步改进以提高测量的全面性和准确性。
技术实现思路
1、有鉴于此,本发明提供基于视频扫描河流表面流量测量方法,通过视频扫描和特征点轨迹跟踪,能够实时获取河流表面流速信息,结合像素单元分辨率和特征点轨迹计算实际流速,从而准确计算河流流量。
2、基于上述目的,本发明提供如下技术方案:
3、一方面,本发明提供基于视频扫描河流表面流量测量方法,包括如下步骤:
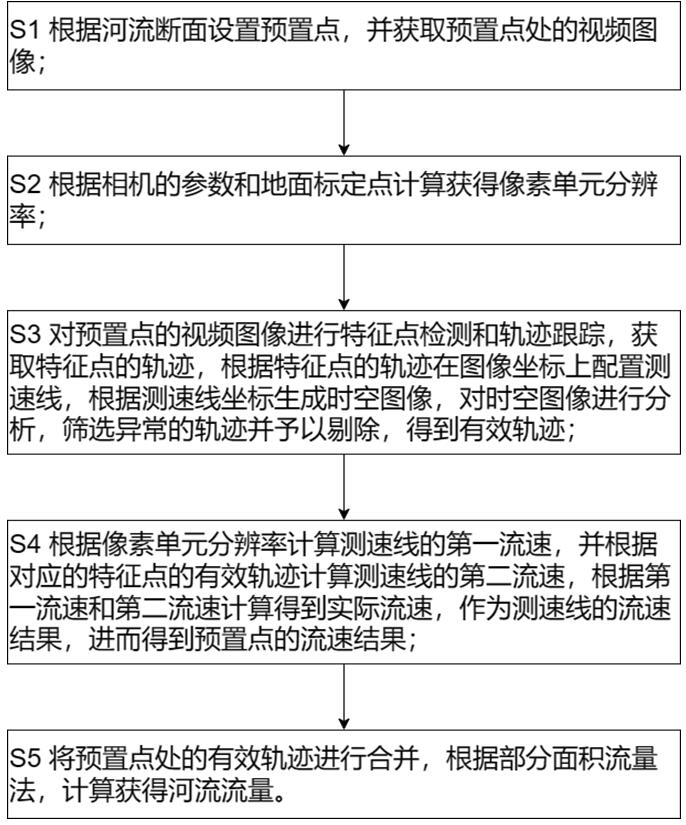
4、s1 根据河流断面设置预置点,并获取预置点处的视频图像;
5、s2 根据相机的参数和地面标定点计算获得像素单元分辨率;
6、s3 对预置点的视频图像进行特征点检测和轨迹跟踪,获取特征点的轨迹,根据特征点的轨迹在图像坐标上配置测速线,根据测速线坐标生成时空图像,对时空图像进行分析,筛选异常的轨迹并予以剔除,得到有效轨迹;
7、s4 根据像素单元分辨率计算测速线的第一流速,并根据对应的特征点的有效轨迹计算测速线的第二流速,根据第一流速和第二流速计算得到实际流速,作为测速线的流速结果,进而得到预置点的流速结果;
8、s5 将预置点处的有效轨迹进行合并,根据部分面积流量法,计算获得河流流量。
9、进一步地,预置点的个数至少为1个。
10、进一步地,步骤s3包括:
11、s301 针对预置点处的视频图像,获取视频图像中第一帧的特征点,对特征点进行二值化处理,基于二值化图像提取特征点的轮廓,根据轮廓阈值筛除异常特征点,利用特征跟踪算法跟踪筛选后的特征点,得到特征点的轨迹;
12、s302 根据特征点的轨迹,在图像坐标上自动配置测速线,根据测速线坐标和透视变换矩阵合成时空图像,利用傅里叶变换,将时空图像从时域变换到频域,得到时空图像的幅度谱图像;
13、s303 利用筛选算法对幅度谱图像进行轨迹的异常筛选,将异常的轨迹予以剔除,得到有效轨迹。
14、进一步地,步骤s303包括:
15、步骤一、在幅度谱图像上设置等长的角度搜索线,角度搜索线的长度为图像最短边长的一半;
16、步骤二、求取中轴线上各个像素点在不同角度 θi下的能量积分值 e(x i ,θ i );
17、步骤三、获取中轴线上各能量积分值的最大值 e(x 1 ,θ 1 ),e(x 2 ,θ 2 ),e(x 3 , θ 3 ),··· e(x n ,θ n ),根据各能量积分值的最大值形成幅度谱图像的最大能量值 max(e(x 1 , θ 1 ),e(x 2 ,θ 2 ),e(x 3 ,θ 3 ),···e(x n ,θ n ));
18、步骤四、判断最大能量值对应的位置是否与幅度谱图像的中心重合,若不重合,则剔除对应的轨迹,若重合,则将对应的轨迹加入过滤轨迹集合中;
19、步骤五、针对过滤轨迹集合中的每个轨迹,计算其幅度谱图像的中心点在不同角度下的能量积分值的平均值;
20、步骤六、计算最大能量值 max(e(x 1 ,θ 1 ),e(x 2 ,θ 2 ),e(x 3 ,θ 3 ),···e(x n ,θ n ))与平均值的比值,若比值小于能量阈值,则剔除对应的轨迹,若比值大于或等于能量阈值,则将对应的轨迹加入有效轨迹集合。
21、进一步地,步骤s4包括:
22、s401 根据像素单元分辨率 s x,按照第一公式计算测速线的第一流速 v1;
23、s402 根据特征点的有效轨迹获取其在图像坐标中的坐标序列,计算每条有效轨迹中相邻轨迹点之间的像素距离,作为像素长度,根据相机的参数将像素长度转换为实际长度l,利用实际长度l,按照第二公式计算测速线的第二流速 v2;
24、s403 根据第一流速和第二流速,利用融合公式计算实际流速,作为测速线的流速结果;
25、s404 重复步骤s401-s403,计算得到所有测速线的流速结果,每条测速线按照其所属视频图像所在起点距进行拼接,得到预置点的流速结果。
26、进一步地,第一公式如下:
27、 v 1 =tanθ·s x ·fps;
28、式中, θ为测速线的倾斜角度, fps为视频图像的帧率。
29、进一步地,第二公式如下:
30、;
31、式中,l为实际长度,t为测流时的时刻。
32、进一步地,融合公式如下:
33、;
34、式中,v实为实际流速,v1为第一流速,v2为第二流速;
35、河流流量的计算公式为:
36、;
37、式中,q为河流流量,单位为m3/s;j为第j条测速线;kj为第j条测速线的垂线水面流速系数;vj为第j条测速线的流速结果,单位为m/s;aj为河流断面的第 j个部分的河流面积,单位为m2。
38、进一步地,当预置点为多个时,步骤s1中,在获取预置点处的视频图像之前,包括:
39、获取相机的像元尺寸 p,相机安装位置的起点距 x0,高程 l0;
40、基于 x0设置测流的断面起点距 x1, x2, x3,..., x i,获取 t时刻时河流的水位 l t;
41、计算预置点的相机俯仰角 α:
42、;
43、根据相似三角形原理,将预置点的相机焦距 f设置为:
44、;
45、其中,k为相机的一个参数,用于调整焦距与实际水位变化之间的比例关系。
46、进一步地,相邻两个预置点拍摄的视频图像,其重叠范围不小于单个视频图像画面范围的5%,单个视频图像历时为5-30s。
47、进一步地,当预置点为1个时,采用非云台相机或云台相机不转动拍摄待测河流表面,预置点即相机的角点,其位于所测河道断面中线的中点处。
48、另一方面,本发明提供一种用于上述基于视频扫描河流表面流量测量方法的装置,所述装置包括:
49、视频采集终端模块,用于采集预置点处的视频图像;所述视频采集终端模块根据预置点的个数采用是否包含云台及角度传感器的相机。
50、图像处理模块,用于对采集到的视频图像进行处理,包括提取特征点、生成特征点的轨迹和筛选得到有效轨迹;
51、边缘计算模块,用于在设备边缘执行计算任务,包括计算测速线的第一流速和第二流速,并将第一流速和第二流速进行融合,得到实际流速,根据合并后的有效轨迹和实际流速,计算获得河流流量;
52、供电单元及传输模块,用于提供稳定的电源供应,并将处理后的数据传输至端侧或总控中心。
53、本发明的方法相对于现有技术具有以下有益效果:
54、(1)本发明通过视频扫描和特征点轨迹跟踪,能够实时获取河流表面流速信息,结合像素单元分辨率和特征点轨迹计算实际流速,相较于单一方法测速,所获得的流速结果更符合实际情况;
55、(2)本发明能够根据调整相机参数,以使其能够应对不同流速级别下图像测流技术所需要的最优的图像像素单元分辨率 s x,通过该方式使得图像测流技术在面对低流速、中流速以及高流速的情况下,均能获得更加准确的流速结果;
56、(3)本发明面对宽河面,采用多个预置点进行流速图像数据获取,通过相邻预置点之间的叠加,构建全河面图像数据,进而获取全断面的流速数据。
- 还没有人留言评论。精彩留言会获得点赞!