一种无人驾驶观光车的数据记录系统及方法与流程
本发明属于汽车智能驾驶,具体涉及一种无人驾驶观光车的数据记录系统及方法。
背景技术:
1、目前公开专利没有针对无人驾驶观光车的数据记录系统的案例,在已知的公开专利中,公开号cn 109240155 a的专利提供了一种多数据源汽车数据采集系统及方法,主要提供一种可配置化数据采集系统开发技术,解决了数据采集应用依赖于数据采集设备开发人员的问题,但是对于无人驾驶观光车的适用性很低,无人驾驶所具备的数据自动筛选需求也没有涉及。
2、现有观光车数据记录系统,一般仅为运营图像视频记录,主要用于出现事故后调取视频回放用于事后的故障分析,不能为提供更为详细的分析数据。并且现有传统汽车数据记录系统,主要用于运营车辆数据本地记录,数据一般限于常规的未经处理的原始数据,不加区分的数据记录造成数据存储量巨大,不利于数据传输,也不利于数据云端存储。
3、因此,现阶段需设计一种无人驾驶观光车的数据记录系统及方法,来解决以上问题。
技术实现思路
1、本发明目的在于提供一种无人驾驶观光车的数据记录系统及方法,用于解决上述现有技术中存在的技术问题,本发明对比现有车辆数据记录方案,在无人驾驶观光车应用场景中使用简便,整车数据记录过程中无需人工操作而自动完成,必要时可通过调整少量系统参数满足不同数据记录需求,本发明所述系统和方法更利于实际无人驾驶车辆运营的维护和使用。
2、为实现上述目的,本发明的技术方案是:
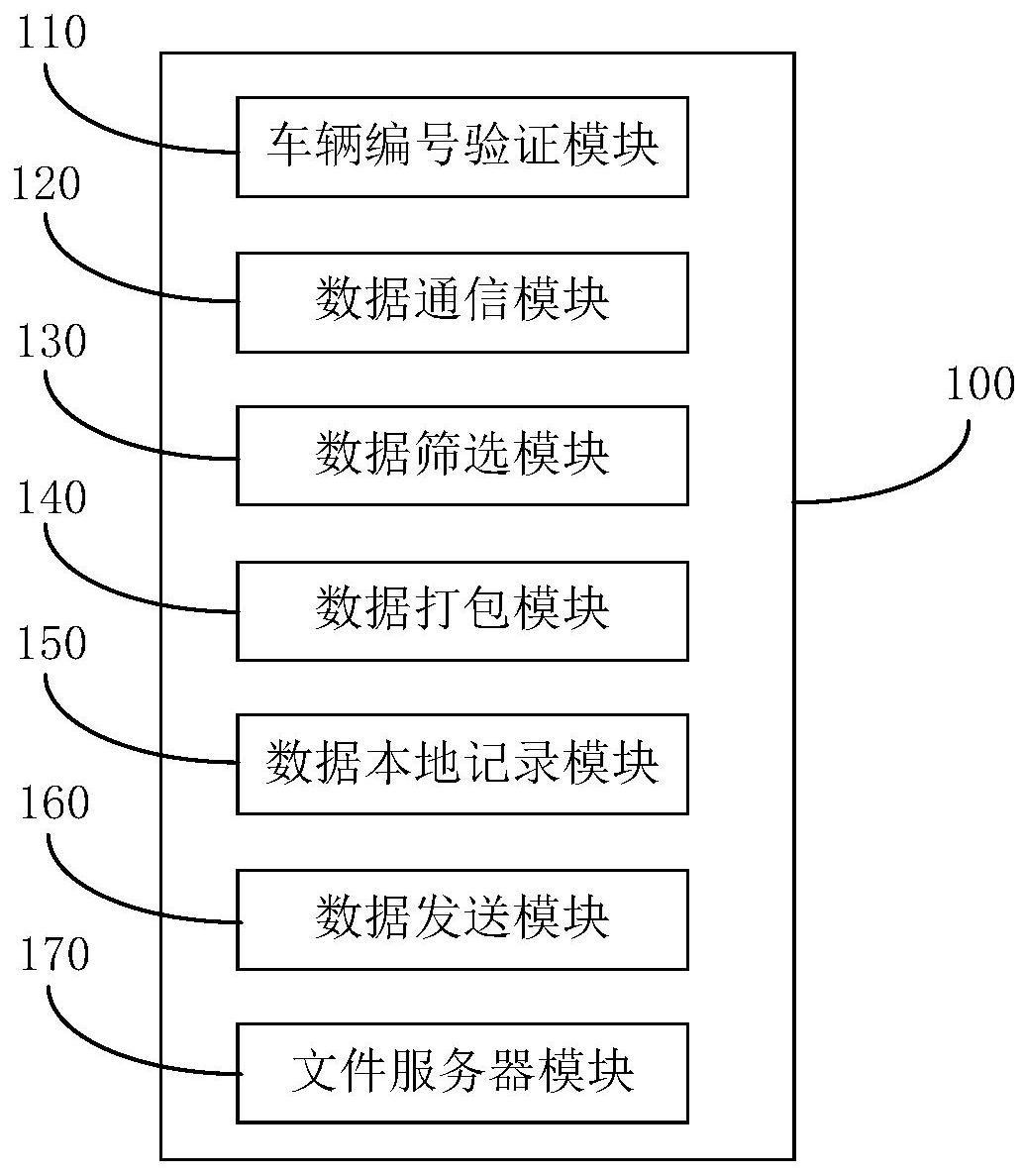
3、一种无人驾驶观光车的数据记录系统,包括:
4、车辆编号验证模块,用于车辆编号有效性的验证,所述有效性是指对象是否存在以及是否编号格式符合设定要求,所述设定要求由车辆编号验证模块设定;
5、数据通信模块,用于接收车辆数据信息,并根据需要把不同格式数据转换为相同格式数据;
6、数据筛选模块,用于将数据划分为两类,一类是完整的原始数据,另一类是有车辆运动特征的数据;
7、数据打包模块,用于将经过分类的数据,分配与数据分类相关的时间间隔,并分配与车辆编号和记录时间相关的文件名称,分配与记录时间相关的本地文件路径;
8、数据本地记录模块,根据数据打包模块分配的文件名称和本地文件路径在车载电脑本地进行存储;
9、数据发送模块,在一个数据包完成数据本地记录后,延迟一个固定时间,然后将数据包压缩后,使用互联网功能发送至文件服务器模块;
10、文件服务器模块,用于接收数据发送模块发送的数据,并在文件服务器中存储;文件服务器模块利用脚本程序,自动对过期数据文件进行清理。
11、进一步的,所述车辆运动特征包括但不限于:驾驶模式为自动驾驶、车速不为0、车速从非0变为0后停车时间不大于1分钟。
12、进一步的,还包括图像数据采集模块、编号位置检测模块、图像亮度检测模块、辅助照明调节模块、编号完整度检测模块、编号清晰度检测模块、控制模块;
13、所述控制模块分别与所述图像数据采集模块、编号位置检测模块、图像亮度检测模块、辅助照明调节模块、编号完整度检测模块、编号清晰度检测模块连接;
14、所述图像数据采集模块用于采集观光车车辆编号所在区域的实时图像数据;
15、所述编号位置检测模块用于检测所述实时图像数据中是否完全涵盖车辆编号位置;
16、所述图像亮度检测模块用于检测所述实时图像数据的亮度是否符合预设标准;
17、所述辅助照明调节模块用于调节观光车车辆编号位置的照明强度;
18、所述编号完整度检测模块用于检测所述实时图像数据中车辆编号是否完整;
19、所述编号清晰度检测模块用于检测所述实时图像数据中车辆编号是否清晰。
20、进一步的,所述控制模块控制所述图像数据采集模块、编号位置检测模块、图像亮度检测模块、辅助照明调节模块、编号完整度检测模块、编号清晰度检测模块常闭;
21、当所述车辆编号验证模块无法自动获取当前观光车的车辆编号时,所述控制模块控制所述图像数据采集模块、编号位置检测模块开启;
22、当所述编号位置检测模块检测到所述实时图像数据中完全涵盖车辆编号位置时,所述控制模块控制所述图像亮度检测模块开启;
23、当所述图像亮度检测模块检测到所述实时图像数据的亮度不符合预设标准时,所述控制模块控制所述辅助照明调节模块;当所述图像亮度检测模块检测到所述实时图像数据的亮度符合预设标准时,所述控制模块控制所述编号完整度检测模块、编号清晰度检测模块开启。
24、进一步的,还包括污浊检测模块、喷水清洁模块;
25、所述控制模块分别与所述污浊检测模块、喷水清洁模块连接;
26、所述污浊检测模块用于检测车辆编号位置是否存在污浊情况;
27、所述喷水清洁模块用于对车辆编号位置进行喷水清洁。
28、进一步的,所述控制模块控制所述还包括污浊检测模块、喷水清洁模块常闭;
29、当所述编号清晰度检测模块检测到所述实时图像数据中车辆编号不清晰时,所述控制模块控制所述污浊检测模块开启;
30、当所述污浊检测模块检测到车辆编号位置存在污浊情况时,所述控制模块控制所述喷水清洁模块开启。
31、进一步的,在所述数据打包模块中,记录时间为数据产生的当前时间,如果数据为一个时间段的数据,则记录时间为该时间段内的最早时间。
32、一种无人驾驶观光车的数据记录方法,包括以下步骤:
33、s101,所述数据记录系统启动后,车辆编号验证模块开始验证车辆编号是否有效,如果无效,则提示车辆操作人员进行处理,如果有效则执行步骤s102;
34、s102,通过数据通信模块对车辆各部分的数据进行接收,数据接收来源包括can协议数据、udp协议数据,如果存在udp协议数据,数据通信模块将udp协议数据进行解析并转换为can协议格式数据;然后执行步骤s103;
35、s103,通过数据筛选模块将数据接收模块得到的数据进行筛选处理,生成两类数据,并分配不同记录时间间隔,一类是完整原始数据,每隔10分钟对应1个文件,一类是带有运动特征的数据,每隔2分钟对应一个文件;然后执行步骤s104;
36、s104,通过数据打包模块,生成每个数据文件的文件名称和本地保存路径,所述文件名称包括车辆编号、精确到秒的数据时间、筛选类别,所述本地保存路径包括车辆编号和精确到天的数据时间;然后执行步骤s105;
37、s105,通过数据本地记录模块,将打包后的数据文件按照所述本地保存路径进行保存;然后延时1分钟执行步骤s106;
38、s106,通过数据发送模块将数据本地记录文件进行自动压缩,然后根据ftp文件传输规则,将压缩后的文件发送至文件服务器;然后执行步骤s107;
39、s107,通过文件服务器模块实现对数据压缩文件的远程记录功能。
40、与现有技术相比,本发明所具有的有益效果为:
41、对比现有车辆数据记录方案,在无人驾驶观光车应用场景中使用简便,整车数据记录过程中无需人工操作而自动完成,必要时可通过调整少量系统参数满足不同数据记录需求,本发明所述系统和方法更利于实际无人驾驶车辆运营的维护和使用。通过自动化车辆数据存储方法,同时实现数据的本地记录和云服务器远程记录,整个过程无需操作人员操作,同时考虑了网络中断时的数据存储安全性,让使用更为便捷有效,此外,对数据经过压缩后再传送至云端的方法也减少了对数据流量以及云端存储空间的需求。
- 还没有人留言评论。精彩留言会获得点赞!