基于速度、角速度、航向角的车辆变道检测方法与流程
本发明涉及交通安全中的驾驶行为分析领域,特别是基于速度、角速度、航向角的车辆变道检测方法。
背景技术:
1、随着全国机动车数量持续增加,交通事故数量也在逐年增加,而引发交通事故的主要原因之一就是车辆违章变道。如果对驾驶员的驾驶行为能够有效地分析,不仅可以在一定程度上预防交通事故的发生,还可以对事故的分析提供依据。目前市面上的驾驶行为分析主要是针对急加速、急减速和急转弯,对于车辆变道的行为少有监控。
2、现有的变道检测方法主要是图像识别技术:在车头部安装摄像头对车道线进行拍摄,通过视频中车道线的位置变化来判断车辆是否变道,还有一些车辆通过视频中车道线与车身夹角来判断是否变道。
3、依靠摄像头拍摄的方式,对处理视频的硬件要求较高,成本较大,而且在强反光、黑暗和雨雾等恶劣天气容易出现无法识别车道以及误判等情况。
技术实现思路
1、为了克服上述现有技术的不足,本发明提供了基于速度、角速度、航向角的车辆变道检测方法。
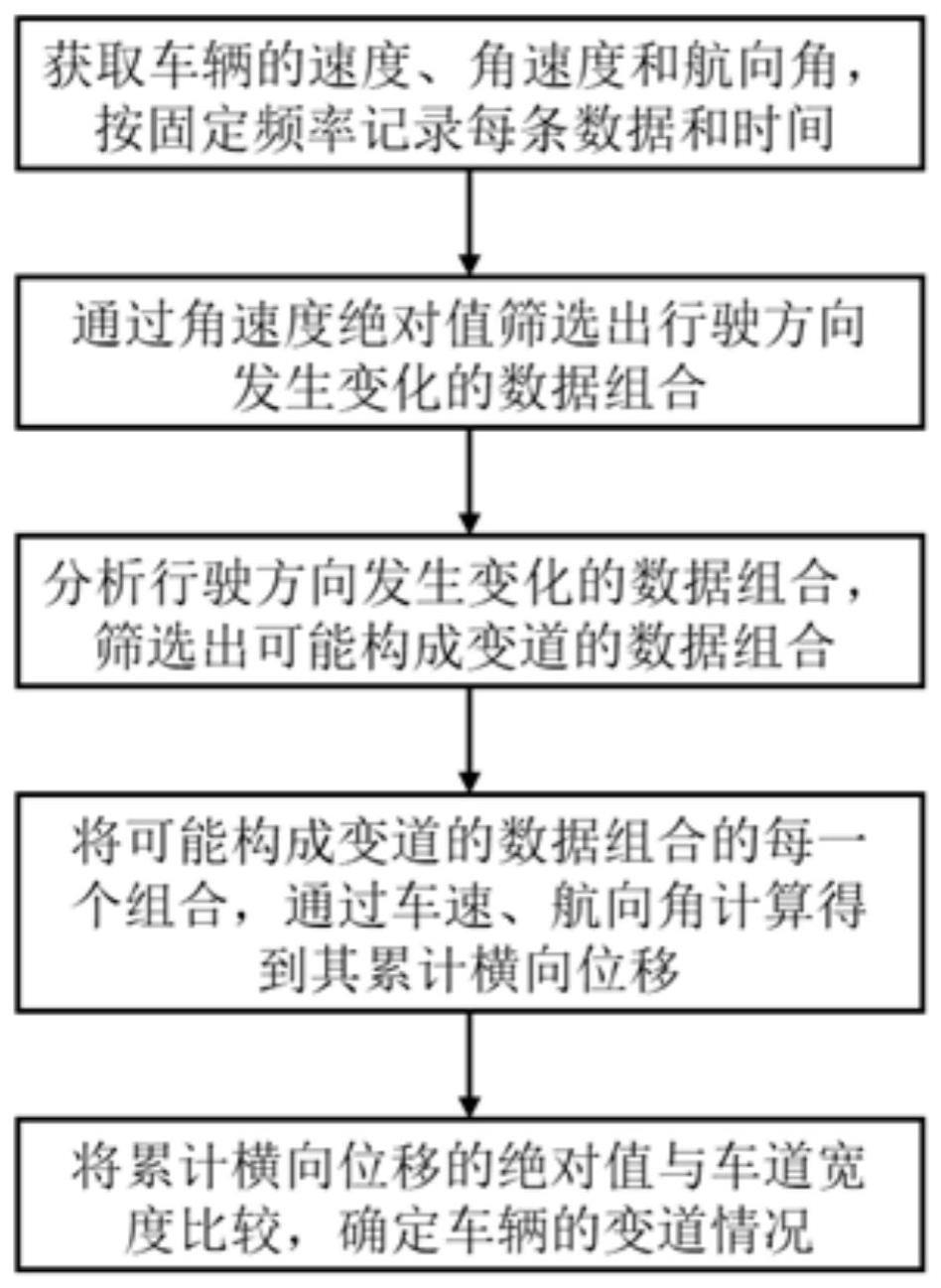
2、本发明所采用的技术方案包括如下步骤:s1.获取车辆的速度、角速度和航向角,记录每条数据和时间;s2.通过角速度绝对值筛选出行驶方向发生变化的数据组合;s3.分析行驶方向发生变化的数据组合,筛选出可能构成变道的数据组合;s4.将可能构成变道的数据组合的每一个组合,通过车速、航向角计算得到其累计横向位移;s5.将累计横向位移的绝对值与车道宽度比较,确定车辆的变道情况。
3、优选的,步骤1获取车辆的速度、角速度和航向角,记录每条数据和时间,其具体方法为:通过九轴陀螺仪获取实时角速度和航向角,通过obd数据采集设备获取车辆的行驶速度,数据采样周期为△t,采样频率为采样周期越短,数据越准确。每次采样的速度、角速度、航向角以及采样时间都保存到数据采集设备内置的存储芯片中。
4、上述九轴陀螺仪是集成了三轴加速度计、三轴磁场传感器、三轴陀螺仪为一体的陀螺仪,具有检测三轴加速度、三轴角速度和三轴角度的功能。其中三轴定义如下:以车辆质心o为坐标原点,以车辆纵轴为x轴,车头方向为x轴正方向,x轴逆时针旋转90°为y轴,z轴垂直于平面xoy,车顶方向为正方向。
5、优选的,步骤2通过角速度绝对值筛选出行驶方向发生变化的数据组合,具体步骤如下:将z轴角速度的绝对值大于阈值ω的连续多条数据,分别向前、后各追加一条数据(如果有),合并为一个数据组合,得到i组行驶方向发生变化的数据组合。
6、上述z轴角速度为车辆行驶方向发生变化时产生的角速度的z轴分量,当车辆向左偏航时,z轴角速度大于0°/s,当车辆向右偏航时,z轴角速度小于0°/s,考虑到车辆在直线行驶中,由于车身震动和传感器漂移等原因,其z轴角速度会在0°/s附近变化,设定车辆行驶方向发生变化的z轴角速度阈值为ω,当z轴角速度绝对值小于等于ω时,判定车辆为直线行驶,当z轴角速度绝对值大于ω时,判定车辆为偏航行驶。将z轴角速度绝对值连续大于ω的多条数据,向前后各追加一条数据(如果有)后合并为一组数据,该组数据所在时间段内,车辆偏离原有方向行驶,用最后一条数据的航向角减去第一条数据的航向角,得到该组数据所在时间段内行驶方向变化的角度。
7、优选的,步骤3分析行驶方向发生变化的数据组合,筛选出可能构成变道的数据组合,相邻两组数据构成变道的必要条件如下:(1)两组数据为相邻的数据组,前一组数据的结束时间和后一组数据的开始时间相差小于t;(2)两组相邻数据始末航向角差值一个为正数,一个为负数,且两个始末航向角差值之和小于θ。将满足上述两个要求的相邻两组数据进行两两合并,得到可能构成变道的数据组合。
8、优选的,步骤4将可能构成变道的数据组合的每一个组合,通过车速、航向角计算得到其累计横向位移,具体步骤如下:
9、对于每一个可能构成变道的数据组合,将该组数据的第一条数据的航向角作为初始航向角θ1;
10、对于该组数据中每一个采样周期的数据,用该条数据的航向角θi加上下一条数据的航向角θi+1后取平均值再减去初始航向角θ1作为该条数据采样周期内航向角相对于初始航向角的偏差,用该条数据的车速vi加上下一条数据的车速vi+1后取平均值作为该条数据采样周期内的平均车速,结合数据采样周期△t,算出该条数据采样周期内的车辆横向位移:
11、
12、将该组数据内每个采样周期的横向位移相加,得到该组数据所在时间段内车辆的累计横向位移:
13、
14、优选的,步骤5将累计横向位移的绝对值与车道宽度比较,确定车辆的变道情况,分为如下情况(以下y表示累计横向位移,|y|表示累计横向位移的绝对值,c表示车道宽度):
15、当|y|<0.7c时,车辆正常直线行驶;
16、当0.7c<|y|≤1.5c时,车辆变一个车道,y>0表示向左变一个车道,y<0表示向右变一个车道;
17、当1.5c<|y|≤2.5c时,车辆变两个车道,y>0表示向左变两个车道,y<0表示向右变两个车道;
18、当|y|>2.5c时,车辆变三个车道,y>0表示向左变三个车道,y<0表示向右变三个车道;
19、变道开始时间为该组数据的第一条数据的采样时间,变道结束时间为该组数据的最后一条数据的采样时间。
20、本发明的工作原理为:通过连接在车辆obd接口的数据采集设备(内置九轴陀螺仪、obd解码芯片、数据存储芯片、网络通信模块、定位模块等)不断采集车辆的速度、角速度、方向角数据,存到存储设备并上传到服务器。对采集的数据进行筛选,首先通过z轴角速度判断找出车辆行驶方向发生变化的数据组,然后将这些数据组相邻的两两比较,找出可能发生变道的相邻数据组并进行合并,再通过计算该数据组所在时间段内车辆的横向位移,与车道宽度比较,分析出车辆的变道情况。
21、本发明与现有基于摄像头图像识别的技术相比,具有如下优点:传感器工作性能稳定、成本低廉,不受雨雾等天气影响。
技术特征:
1.基于速度、角速度、航向角的车辆变道检测方法,其特征在于,包括如下步骤:s1.获取车辆的速度、角速度和航向角,按固定频率记录每条数据和时间;s2.通过角速度绝对值筛选出行驶方向发生变化的数据组合;s3.分析行驶方向发生变化的数据组合,筛选出可能构成变道的数据组合;s4.将可能构成变道的数据组合的每一个组合,通过车速、航向角计算得到其累计横向位移;s5.将累计横向位移的绝对值与车道宽度比较,确定车辆的变道情况。
2.根据权利要求1所述的基于速度、角速度、航向角的车辆变道检测方法,其特征在于,所述角速度是指车辆z轴的角速度,所述z轴定义如下:以车辆质心o为坐标原点,以车辆纵轴为x轴,车头方向为x轴正方向,x轴逆时针旋转90°为y轴,z轴垂直于平面xoy,车顶方向为正方向。
3.根据权利要求1所述的基于速度、角速度、航向角的车辆变道检测方法,其特征在于,所述行驶方向发生变化的数据组合,具体如下:将z轴角速度的绝对值大于阈值ω的连续多条数据,分别向前、后各追加一条数据(如果有),合并为一个数据组合,得到i组行驶方向发生变化的数据组合。
4.根据权利要求1所述的基于速度、角速度、航向角的车辆变道检测方法,其特征在于,所述可能构成变道的数据组合,具体如下:对于上述i组数据组合的每一组数据,用该组数据的最后一条数据的航向角减去第一条数据的航向角得到该组数据始末航向角差值;若相邻两组数据的始末航向角差值一个为正数一个为负数,且它们的和小于θ,同时满足前一组数据的结束时间和后一组数据的开始时间相差小于t,则将这相邻的两组数据合并为一组数据,得到j组可能构成变道的数据组合。
5.根据权利要求1所述的基于速度、角速度、航向角的车辆变道检测方法,其特征在于,所述累计横向位移,计算步骤如下:
6.根据权利要求1所述的基于速度、角速度、航向角的车辆变道检测方法,其特征在于,所述车辆的变道情况,分为如下情况(以下y表示累计横向位移,y表示累计横向位移的绝对值,c表示车道宽度):
技术总结
本发明公开了基于速度、角速度、航向角的车辆变道检测方法,该方法包括:S1.获取车辆的速度、角速度和航向角,按固定频率记录每条数据和时间;S2.通过角速度绝对值筛选出行驶方向发生变化的数据组合;S3.分析行驶方向发生变化的数据组合,筛选出可能构成变道的数据组合;S4.将可能构成变道的数据组合的每一个组合,通过车速、航向角计算得到其累计横向位移;S5.将累计横向位移的绝对值与车道宽度比较,确定车辆的变道情况。本发明解决了依赖摄像头判断变道的成本高、准确度低的问题。
技术研发人员:李玉亮,熊开胜
受保护的技术使用者:苏州万特锐仪器有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!