一种基于可变限速的长上坡交通流稳定性提升方法与流程
1.本发明属于智能交通技术领域,尤其涉及一种基于可变限速的长上坡交通流稳定性提升方法。
背景技术:
2.近年来,智慧交通飞速发展,交通管控手段如匝道控制、交通诱导、动态限速等通过改变有限的道路资源的分配方式,减缓了交通拥堵,提升了交通运输效率和出行体验。然而目前以上手段及其拓展版本都没有聚焦于长上坡交通流的不稳定性,根据研究[tu xu; jorge laval*; driver reactions to uphill grades: inference from a stochastic car
‑
following model, transportation research record, 2020, 2674(11): 343
‑
351.],车辆的爬坡速度受引擎动力限制,小于其自由流速度,因此速度的突变会造成单车的“时停时走”现象与车队的交通震荡现象[j. a. laval, c. s. toth, and y. zhou,
ꢀ“
a parsimonious model for the formation of oscillations in car
‑
following models,
”ꢀ
transp. res. part b methodol., vol. 70, pp. 228
–
238, 2014.]。以上现象不仅加剧了交通拥堵中的经济损失、环境污染,更带来了交通安全的隐患。
[0003]
目前虽然有很多可变限速的研究,但其大多只用于快速路上下游的速度调和,以减少交通事故,或用于匝道合流处的通行效率提升。
技术实现要素:
[0004]
本发明目的在于针对现有长上坡交通流管控技术的不足和交通流稳定性低的问题,提供一种基于可变限速的长上坡交通流稳定性提升方法。
[0005]
本发明的目的是通过以下技术方案来实现的:一种基于可变限速的长上坡交通流稳定性提升方法,包括如下步骤:s1:根据路段的上下游关系与坡度数据,对路段进行编码划分,并进行设备安装;s2:依托安装的设备,进行数据采集与分析,根据s1中路段的编码,得到路段不同区域的车道级交通流指标;s3:依托s2中获取的车道级交通流指标,构建车辆跟驰模型,为小客车与货车分别赋予不同的参数;同时根据交通流量密度速度,确立仿真的初始条件与边界条件,搭建交通仿真环境;s4:输出s3中车道级仿真结果,依托交通流稳定性与车辆排放的相关三项指标,选择最优可变限速情报并发布。
[0006]
进一步地,步骤s1包括以下子步骤:s1.1:获取道路交通信息数据,道路信息数据包括车道数、高程与路段桩号的对应关系;s1.2:将高程数据转化为坡度数据,并对路段进行编码划分,具体为:首先将路段分为三大部分:区域fu、区域u、区域f;区域u为长上坡路段,区域fu为
长上坡路段的下游路段,区域f为长上坡路段的上游路段;其次,根据到区域u的距离,对区域f进行细分:上坡路段起点至上坡路段上游500米计为区域f1;上坡路段上游500米至1000米计为区域f2;上坡路段上游1000米至1500米计为区域f3;上坡路段上游1500米至2000米计为区域f4;s1.3:在长上坡路段内以及长上坡路段上游2000米内布设交通流数据采集设备:一台设备针对一车道,探测断面间距设为500米;具体摆放位置为五个区域的分界处,一组设备负责一个区域;每隔一段时间采集监控区间内的交通信息;s1.4:布设可变限速指令发布设备,位于区域f1与f2的交界处横断面;其中区域f1为限速区域。
[0007]
进一步地,步骤s1.1中,通过高德地图或地理国情监测云平台获取道路交通信息数据。
[0008]
进一步地,步骤s1.3中,选择摄像头作为交通流数据采集设备;每隔1秒采集监控区间内的交通信息;交通信息包括交通流密度、流量、速度、占有率。
[0009]
进一步地,步骤s1.4中,可变限速信号板作为可变限速指令发布设备,布设于交通龙门架上。
[0010]
进一步地,步骤s2包括以下子步骤:s2.1:处理道路信息数据,得到长上坡路段u的长度与平均坡度;s2.2:根据区域f的交通流数据,获取车道级交通流指标,计算水平路段的自由流速度、关键密度、拥堵密度、交通波速度、拥堵间距,构建水平路段常态下的交通流基本图;s2.3:根据区域u的交通流数据,获取车道级交通流指标,计算上坡路段的自由流速度、关键密度、拥堵密度、交通波速度、拥堵间距,构建上坡路段常态下的交通流基本图;s2.4:根据区域f4的交通信息数据,以预设时长为颗粒度,获取路段实时重型车辆占比与实时交通密度。
[0011]
进一步地,步骤s2中,上坡路段中,轻型车辆与重型车辆的交通流基本图不相同。
[0012]
进一步地,步骤s3包括以下子步骤:s3.1:仿真区域为区域f的起点至区域fu的终点;s3.2:仿真中的车辆从f的起点开始生成,初始间距符合s2.2中获取的区域f的交通流密度信息;车辆的初始速度为s2.2中获取的f区域的该车型的自由流速度;车辆生成的车型分布符合s2.4中的比例;s3.3:确定仿真车辆的初始与边界条件后,建立车道级车辆跟驰模型,动态更新车辆的位置、速度、加速度、排放;每条不同车道上的车辆单独编码,单个车道上,第一辆进入仿真区域f4的id为,从下游到上游,车辆的id依次增加;s3.4:车道级的车辆跟驰模型如下:其中,表示时刻,为车道上id为的车辆在时刻的位置,为仿真的步长,为拥堵间距,为自由流状态下id为的车辆预期前进的路程;s3.5:自由流状态下车辆预期前进的路程通过求解如下微分方程组得到:
其中,为车辆在时刻的速度,为车辆的爬坡速度,为弛豫时间的倒数,为维纳过程,为扩散系数;s3.6:车辆的爬坡速度为:其中,无限速时,为车辆的自由流速度;有限速时,为限速值;为无量纲常数,为重力加速度常数,g为坡度;s3.7:计算车辆排放。
[0013]
进一步地,步骤s3.7具体为:采用美国国家环境保护局发布的moves排放模型,在仿真过程中,计算当前车辆的秒级二氧化碳排放信息。
[0014]
进一步地,步骤s4包括以下子步骤:s4.1:设置控制周期,每隔一段时间运行一次交通仿真;s4.2:每条车道根据s2中处理得到的实时交通流信息,按照s3中的方法生成车辆,对无限速与不同限速场景进行车道级仿真推演;s4.3:每次仿真结束后,得到三项指标:车道级车队间平均速度的标准差、车道级单车速度的标准差的平均值、车道级二氧化碳排放的总和;s4.4:限速值单位为km/h,值必须为5的倍数;若s4.4中的三项指标相比无限速均提升5%以上,则应用可变限速值,否则维持无限速状态;若有多个限速值满足提升要求,则应用速度最高的限速值;可变限速值不得低于70km/h。
[0015]
本发明的有益效果:本发明通过对车辆的跟驰行为进行建模,解释了快速路长上坡处的交通问题,找到了造成长上坡路段处交通震荡现象的原因。基于理论分析与仿真实证,本发明通过情报板发布可变限速信息,引导长上坡上游车辆适当提前减速,避免因上坡路段引擎动力不足造成的速度突变,从而减缓快速路长上坡路段的交通震荡现象。本发明显著提升了交通流稳定性,从而降低了安全隐患,提高交通效率,同时该方法显著降低了长上坡路段的车辆排放污染。
附图说明
[0016]
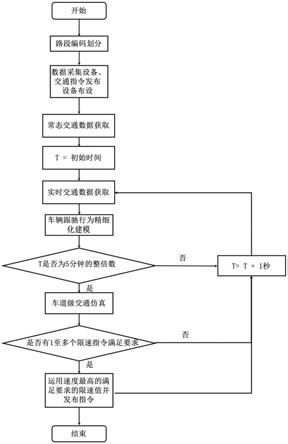
图1是本发明的总流程图;图2是本发明的路段划分编码与设备安装示意图;图3是本发明实施例的路段划分编码与设备安装示意图。
具体实施方式
[0017]
下面根据附图和优选实施例详细描述本发明,本发明的目的和效果将变得更加明白。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0018]
本发明一种基于可变限速的长上坡交通流稳定性提升方法,主要用于城市快速路或高速公路的长上坡路段。首先对路段根据坡度与上下游关系进行编码划分,将摄像头获
取的交通流密度、速度、车型信息等数据作为模型输入,构建双机制的车辆跟驰随机模型,搭建交通仿真平台进行交通仿真,通过网格搜索法获取可变限速的输出值,从而通过引导长上坡上游车辆适当提前减速,避免因上坡路段引擎动力不足造成的速度突变。如图1所示,具体包括以下步骤:s1:路段编码与设备安装:s1.1选择高德地图、地理国情监测云平台等获取道路交通信息数据,道路信息数据包括车道数、高程与路段桩号的对应关系。
[0019]
s1.2:将高程数据转化为坡度数据,并对路段进行编码划分,具体方法如下,首先将路段分为三大部分:水平路段fu(为长上坡路段的下游路段)、长上坡路段u、水平路段f(为长上坡路段的上游路段)。其次,根据到长上坡路段的距离,对长上坡路段上游的水平路段进行细分。上坡路段起点至上坡路段上游500米的区域计为区域f1、上坡路段上游500米至1000米的区域计为区域f2、上坡路段上游1000米至1500米的区域计为区域f3、上坡路段上游1500米至2000米的区域计为区域f4。见图2。
[0020]
s1.3:选择摄像头作为交通流数据采集设备,在长上坡路段内以及长上坡路段上游2000米内快速路布设,一台摄像头针对一车道,探测断面间距设为500米。具体摆放位置为五个区域的分界处,一组摄像头负责一个区域(多车道)。每隔1秒采集监控区间内的交通流密度、流量、速度、占有率等交通信息。
[0021]
s1.4:可变限速信号板作为可变限速指令发布设备,布设于交通龙门架上,位于区域f1与f2的交界处横断面。f1为限速区域。
[0022]
s2:数据采集与分析,得到车道级交通流指标:s2.1:处理道路信息数据,得到区域u的长度与平均坡度。
[0023]
s2.2:根据f区域的交通流数据,获取流量、密度、速度等车道级指标,计算水平路段的自由流速度、关键密度(critical density)、拥堵密度(jam density)、交通波速度(wave speed)、拥堵间距(jam spacing)等指标,构建水平路段常态下的交通流基本图,见图3。
[0024]
s2.3:根据u区域的交通流数据,获取流量、密度、速度等车道级指标,计算上坡路段的自由流速度、关键密度(critical density)、拥堵密度(jam density)、交通波速度(wave speed)、拥堵间距(jam spacing)等指标,构建上坡路段常态下的交通流基本图。尤其需要注意,轻型车辆与重型车辆的交通流参数(交通流基本图)不相同。
[0025]
s2.4:根据f4区域的交通信息数据,每隔一段时间,获取路段实时重型车辆占比与实时交通密度。
[0026]
s3:构建车辆跟驰模型、搭建仿真环境:s3.1:仿真区域为区域f的起点至区域fu的终点。
[0027]
s3.2:仿真中的车辆从f的起点开始生成,初始间距符合s2.2中获取的f区域的交通流密度信息。车辆的初始速度为s2.2中获取的f区域的该车型的自由流速度。车辆生成的车型分布符合s2.4中的比例。
[0028]
s3.3:确定仿真车辆的初始与边界条件后,建立车道级车辆跟驰模型,动态更新车辆的位置、速度、加速度、排放。每条不同车道上的车辆单独编码,单个车道上,第1辆进入仿真区域f4的id为,从下游到上游,车辆的id依次增加。
[0029]
s3.4:车道级的车辆跟驰模型如下:其中,为当前时刻,为该车道上id为的车辆在时刻的位置,为仿真的步长(1秒),为拥堵间距(jam spacing),为自由流状态下id为的车辆预期前进的路程。
[0030]
s3.5:进一步的,针对特定的车辆,不考虑车辆id(忽略j),可以通过求解如下的微分方程组得到:其中,为车辆在时刻的速度,为车辆的爬坡速度,为弛豫时间的倒数,为维纳过程(wiener process),为扩散系数。
[0031]
s3.6:进一步的,车辆的爬坡速度为:其中,无限速时,为车辆的自由流速度;有限速时,为限速值;为无量纲常数,为重力加速度常数,g为坡度。
[0032]
s3.7:车辆排放计算:采用美国国家环境保护局发布的moves排放模型,在仿真过程中,根据车辆的类型、秒级速度、加速度、所在位置的坡度等参数计算当前车辆的秒级二氧化碳排放信息。
[0033]
s4:设计评价指标,输出车道级仿真结果,发布可变限速情报:s4.1:控制周期为5分钟,每5分钟运行一次交通仿真。
[0034]
s4.2:每条车道根据s2中处理得到的实时交通流信息,按照s3中的方法生成车辆,对无限速与不同限速场景进行车道级仿真推演。
[0035]
s4.3:每次仿真结束后,得到三项指标:车道级车队间平均速度的标准差、车道级单车速度的标准差的平均值、车道级二氧化碳排放的总和。
[0036]
s4.4:限速值单位为km/h,值必须为5的倍数。若s4.4中的三项指标相比无限速均提升5%以上,则应用可变限速值,否则维持无限速状态。若有多个限速值满足提升要求,则应用速度最高的限速值。可变限速值不得低于70km/h。
[0037]
本发明一种实施例,假设采集到的路况信息为:长上坡的长度为500米,平均坡度为5%。具体实施过程如下:第一步:首先,根据路况信息对路段进行划分编码,并将数据采集设备与动态限速指令发布设备布设在指定区域,见图3。其次,根据f区域最左侧车道的车道级交通流数据,分析得出f区域最左侧车道的车道级交通流特征如下:(1)交通流平均密度为40辆车/km,车辆的平均间距为25m;(2)小型汽车与大型汽车的自由流速度均为100km/h,弛豫时间的倒数为0.07,拥堵间距均为6m。
[0038]
在上坡区域u,车辆的爬坡速度相应下降,根据对区域u内交通轨迹数据的分析,小型客车的值为0.5,大型客车的值为1。另外,得到最近5分钟内,小型客车占比为80%,大型客车占比为20%。
[0039]
第二步:根据以上初始条件、边界条件与模型参数,设定不同的可变限速值,进行车道级交通流仿真。仿真对应的现实世界时长为200秒,路段长度为1500米,车辆数为50辆。输出为该车道的:车道级车队间平均速度的标准差、车道级单车速度的标准差的平均值、车道级二氧化碳排放的总和。
[0040]
第三步:根据仿真结果,对f1区域的可变限速值在100、95、
…
、70km/h中进行选择,得到最优限速指令为70km/h。在没有实施本发明方案的情况下,车队的平均速度的标准差的置信区间(以下均为95%置信区间)为[1.20,3.21]km/h,单车速度标准差的平均值的置信区间为[2.27,3.63]km/h,二氧化碳排放的总和的置信区间为[0.097,0.127]grams。在实施了最优限速指令70km/h的情况下,车队的平均速度的标准差的置信区间为[0.31,1.19]km/h,单车速度标准差的平均值的置信区间为[1.22,2.34]km/h,二氧化碳排放的总和的置信区间为[0.084,0.097]grams。三项指标分别提升(数值上下降)了66%、40%、19%。
[0041]
可以观察到本发明构建的具有优秀的实时性能,同时通过可变限速的指令,大大提升了车队在长上坡路段通行的稳定性,降低了二氧化碳的排放,在实际工程中带来重大效益。
[0042]
上述实施例用来解释说明本发明,而不是对本发明进行限制,在本发明的精神和权利要求的保护范围内,对本发明作出的任何修改和改变,都落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1