自动驾驶车辆的操作方法与流程
本发明涉及一种自动驾驶车辆在路口区域内的操作方法。
背景技术:
1、由de 10 2016 203 086 a1公开一种司机辅助方法和一种司机辅助系统。该方法规定,主车自动执行驾驶操作,其中,在驾驶操作执行时识别主车周围环境内的对象。对象被分类,其中,形成狭窄点的静止对象和迎面驶来车辆被分类。接着预测主车运动和迎面驶来车辆运动。查明在形成狭窄点的静止对象周围环境中的空闲区,并且确定主车在狭窄点因迎面驶来车辆而无法继续行驶的第一封堵状态,和/或确定主车无法识别狭窄点结束的第二封堵状况,其中,在确定封堵状况时确定停止位置,主车停在该停止位置直到封堵状况解除。
技术实现思路
1、本发明的目的是实现一种自动驾驶车辆的操作方法。
2、根据本发明,该目的通过具有权利要求1所述的特征的方法来实现。
3、本发明的有利设计是从属权利要求的主题。
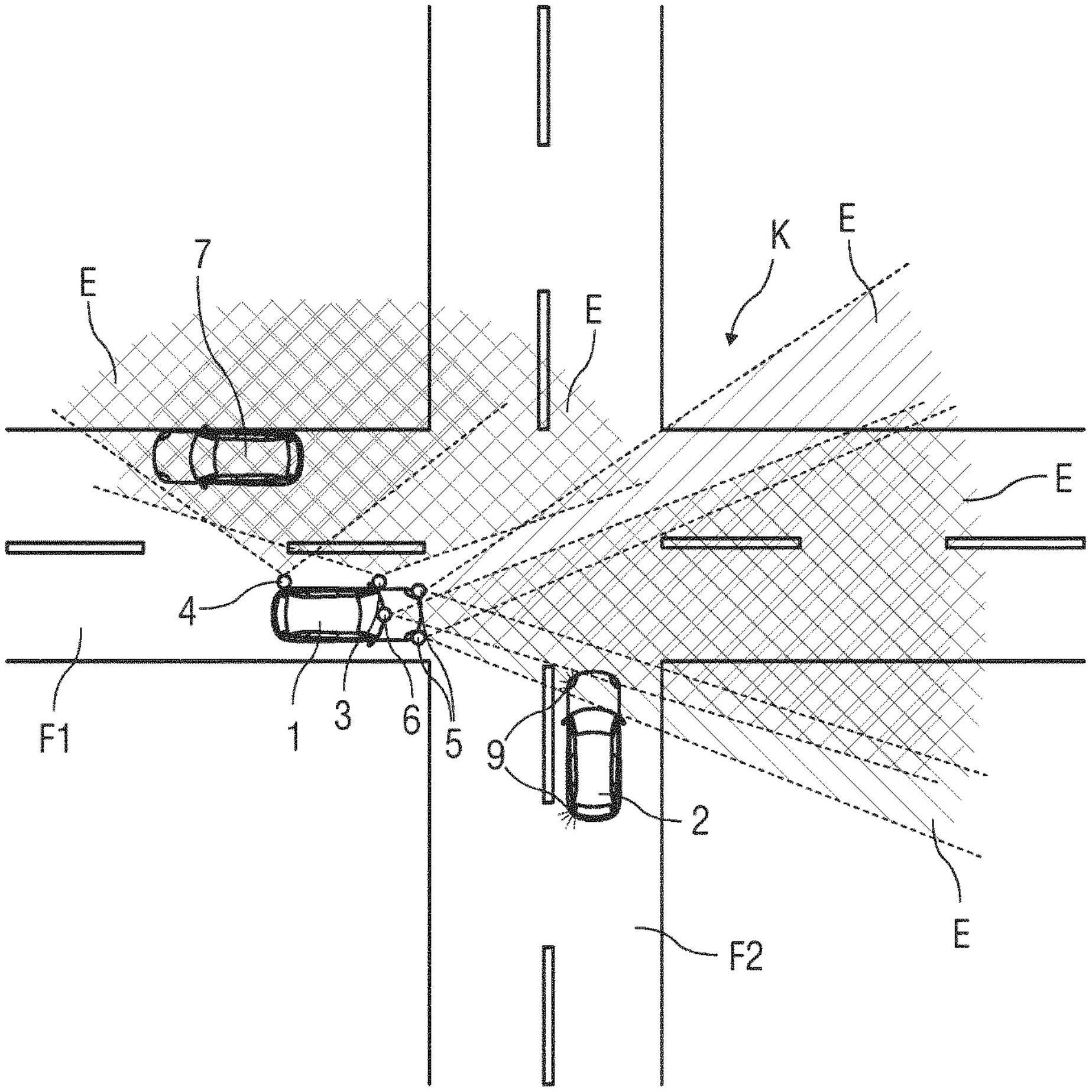
4、根据本发明,一种用于在路口区域中的自动驾驶、尤其是无司机驾驶的车辆的操作方法规定,测知在路口有先行权的另一车辆并且查明其既定的行驶路径。如果依据既定的行驶路径确定另一车辆在经过路口之后应该在车辆侧旁驶过,则查明另一车辆的行驶路径是否被障碍所封堵。如果确定另一车辆的行驶路径被封堵,则建立与另一车辆的通信连接,该车辆借助通信连接通知另一车辆:行驶路径被封堵。
5、通过使用该方法,两个车辆的封堵状况可被基本排除,尤其是针对下述情况:两个自动驾驶车辆停在让右路口,有先行权的其中另一车辆想要拐到主车辆所在的道路上并且该另一车辆不得不停在主车辆前,因为另一车辆例如由于一个停放车辆而无法在主车辆侧旁驶过,因而两个车辆在无其它措施的情况下在一段不确定的时间内滞留在那里,直到封堵状况例如可借助遥控操作人员被消除。
6、由于至少该车辆识别到即将出现的封堵状态并且相应与另一车辆通信以便能够找到解决方案,故还可以优化交通流量,因为可以抵制封堵状况的出现。
7、该方法的一个实施方式规定,协调两个车辆以何种顺序经过路口。尤其是,该顺序被协调以避免封堵状况,使得该车辆首先采取其驾驶操作以经过路口,尽管另一车辆有先行权。
8、在一个改进方案中,借助车辆还确定另一车辆看向阻断其行驶路径的障碍的视线是否被挡。尤其当确定另一车辆看向障碍的视线被挡时,立即建立在两个车辆之间的通信连接以避免另一车辆采取其行驶操作并由此出现针对两个车辆的封堵状态。
9、该方法的另一个设计方案规定,为了确定出现封堵状态,查明在车辆与阻断另一车辆的行驶路径的障碍之间的剩余道路宽度与另一车辆的宽度。在此,剩余道路宽度和另一车辆的宽度依据车辆的所采集信号被确定以执行比较。
10、在一个可能实施方式中,将剩余的道路宽度与另一车辆的宽度相比较以确定封堵状况的出现,从而能确定:当另一车辆首先经过路口时,剩余道路宽度是否足以供另一车辆在车辆旁且尤其在车辆与障碍之间驶过。
11、在此,在该方法的一个设计方案中,另一车辆的既定行驶路径依据被启用的行驶方向指示器和/或依据通过车对车通信所传输的信息被确定。因此,车辆被告知另一车辆有意行驶哪条行驶路径,从而能查明该车辆道路上的障碍是否影响到另一车辆的转弯过程。
12、借助另一车辆,为了核实另一车辆的宽度,其宽度以及所设定的行驶方向指示器的信号通过车对车通信被发送给该车辆。因此,另一车辆的行驶路径和在车辆与障碍之间的剩余道路宽度可被核实。
13、另一车辆也按自动驾驶方式无司机运行,因此两个车辆的车辆使用者无法沟通以尽量避免或消除封堵状况。
技术特征:
1.一种在路口(k)区域内的自动驾驶车辆(1)的操作方法,其特征是,
2.根据权利要求1所述的方法,其特征是,就这两个车辆(1,2)以何种顺序经过路口(k)进行协调。
3.根据权利要求1或2所述的方法,其特征是,借助该车辆(1)来查明该另一车辆(2)看向堵住其行驶路径的障碍的视线是否被挡。
4.根据前述权利要求中任一项所述的方法,其特征是,为了确定封堵状况的出现,查明在该车辆(1)与封堵该另一车辆(2)的行驶路径的障碍之间的剩余道路宽度以及该另一车辆(2)的宽度。
5.根据权利要求4所述的方法,其特征是,为了确定封堵状况的出现,将该剩余道路宽度与该另一车辆(2)的宽度相比较。
6.根据前述权利要求中任一项所述的方法,其特征是,该另一车辆(2)的既定行驶路径依据被启用的行驶方向指示器(8)和/或依据通过车对车通信所传输的信息来确定。
7.根据权利要求6所述的方法,其特征是,借助该另一车辆(2),将该另一车辆的宽度以及所设定的行驶方向指示器(9)的信号通过车对车通信传输给该车辆(1),用以核实该另一车辆(2)的宽度。
8.根据前述权利要求中任一项所述的方法,其特征是,该另一车辆(2)按自动驾驶方式无司机运行。
技术总结
本发明涉及一种在路口(K)区域内的自动驾驶车辆(1)的操作方法。本发明规定,测知在路口(K)有先行权的另一车辆(2)并查明其既定的行驶路径;如果依据既定的行驶路径确定另一车辆(2)在经过路口(K)后应该在车辆(1)侧旁驶过,则查明另一车辆(2)的行驶路径是否被障碍封堵;如果确定另一车辆(2)的行驶路径被障碍封堵,则建立与另一车辆(2)的通信连接,该车辆(1)借助通信连接通知另一车辆(2)行驶路径被封堵。
技术研发人员:K·A·赫尔曼
受保护的技术使用者:梅赛德斯-奔驰集团股份公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!