一种基于ADS-B的航空器自主间隔控制方法
一种基于ads-b的航空器自主间隔控制方法
技术领域
1.本发明涉及一种航空器自主间隔控制方法,具体涉及一种基于ads-b的航空器自主间隔控制方法。
背景技术:
2.目前因空中交通管理模式发展不充分、职能责任发挥不充足原因导致的航班延误损失将无法估计,究其根本原因在于以地面管制为中心、航空器完全受管控的空中交通模式存在固有的不足。目前集中式空中交通管理模式所能采用的技术和管理手段已经发挥其极致。空地协同的分布式空中交通管理在预战术阶段由地面管制员为航空器提供无冲突四维航迹和跟随间隔,飞行机组可以采用飞行管理系统fms等机载自动化技术实现控制到达时间,在战术阶段由航空器自主保持间隔系统asas提供间隔保障,允许将一部分间隔保持责任由地面管制中心转移至飞行机组。在高密度、大流量空域或航路上,利用空中自主运行与地面引导相协同的分布式空中交通管理,将部分的管制责任移交至航空器是提高空域航空器运行效率与航空器飞行密度的有效途径。与以地面为中心的集中式空中交通管理相比,空地协同空中交通管理方式是实现了航空安全性与飞行效率间的平衡,是解决未来大交通流量情况下空中交通管理的有效手段,航空器的自主间隔控制方法是保证航空器空中自主运行安全的基础。
技术实现要素:
3.发明目的:本发明针对现有航路航行航空器间间隔控制完全依赖地面空管系统而无法进行自主地间隔控制的问题,提供一种基于ads-b的航空器自主间隔控制方法,结合空管系统的集中式航空器控制管理,能实现空域航行航空器间的有效自主间隔控制,将部分间隔责任移交至航空器,提高空域航空器航行密度与效率。
4.技术方案:本发明提供一种基于ads-b的航空器自主间隔控制方法,包括以下步骤:
5.(1)依据ads-b航空器航行状态信息及空管预计航空器飞行路径信息,生成航路水平轨迹;
6.(2)计算各航路点距自主间隔计划终止点的沿水平轨迹航行行程距离dtg,生成各航路点序列间不同轨迹段地速剖面并得到航路航行参考轨迹;
7.(3)利用参考轨迹中航路距离信息及速度信息及航空器ads-b定位信息中的当前航行经纬度点匹配参考轨迹的位置点,基于基本运动学原理结合地速剖面图计算得到本机航空器和目标航空器从当前航路位置点到达自主间隔计划终止点的目标到达时间ttg;
8.(4)计算本机航空器与目标航空器间的预测间距间隔;
9.(5)计算航空器飞行自主间隔实现阶段的控制律速度;
10.(6)计算航空器飞行自主间隔保持阶段的控制律速度。
11.进一步地,所述步骤(1)包括以下步骤:
12.(11)依据预计飞行路径信息元素得到航空器预计飞行航线上的各航路点的经纬度、速度、高度信息,并初步得到各航路点序列;
13.(12)利用各航路点序列信息依次判断得出航路点间航段的直线或转弯的类型,计算本机航空器与目标航空器的航段信息元素并依次连接航路点序列得到水平轨迹。
14.进一步地,所述步骤(2)实现过程如下:
15.依据各航路点元素间的距离值依次累加计算各个航路点到自主间隔计划终止点的沿水平轨迹航行行程距离:
[0016][0017][0018]
其中,(x0,y0)为自主间隔计划终止点坐标,dtgi为由自主间隔计划终止点向后推第i个航路点距自主间隔计划终止点的行程距离长度;
[0019]
依据航路点序列中各航路点的预计速度信息v及计算得到的各航路点的dtg,生成各航路点序列间不同轨迹段的航空器速度v关于距离dtg的地速剖面;结合水平轨迹与地速剖面,水平轨迹各点对应坐标与地速值,得到航路航行参考轨迹。
[0020]
进一步地,所述步骤(3)实现过程如下:
[0021]
依据航路点序列中各航路点的预计速度信息v及计算得到的各航路点的dtg,生成各航路点序列间不同轨迹段的航空器速度v关于距离dtg的地速剖面,结合水平轨迹与所对应地速剖面得到航路航行参考轨迹;利用参考轨迹中航路距离信息及速度信息,依据航空器ads-b定位信息中的当前航行经纬度点匹配参考轨迹的位置点;基于基本运动学原理结合地速剖面图计算得到本机航空器和目标航空器从当前航路位置点到达自主间隔目标点的到达时间ttg:
[0022][0023]
其中,v
gs
为航空器飞行地速,为地速剖面图中得到的地速对于点(x0,y0)到点(xi,yi)的距离s的积分;进而基于目标到达时间ttg的航空器自主间隔控制算法来进行im自主间隔在实现阶段的间隔预测与速度保持控制。
[0024]
进一步地,所述步骤(4)包括以下步骤:
[0025]
(41)在目标航空器到达预先设定的目标实现点之前,时间t时的预测时间间隔psi
t
(t)是指,在时间t时本机航空器到达目标实现点的目标到达时间ttg与目标航空器到达目标实现点的ttg之间的差值,用方程式表示:
[0026]
psi
t
(t)=etao(t)-eta
t
(t)=ttgo(t)-ttg
t
(t)
[0027]
其中,psi
t
(t)为预测时间间隔,etao(t)为本机航空器预计到达目标实现点的时间,eta
t
(t)为目标航空器预计到达目标实现点的时间,ttgo(t)为本机航空器的目标到达时间,ttg
t
(t)为目标航空器的目标到达时间;
[0028]
(44)目标航空器已通过目标实现点但本机航空器并未到达目标实现点,时间t时
的预测间隔psi
t
(t)为本机航空器在目标实现点的预计到达时间eta与目标航空器在到达目标实现点时的所实际到达时间ata之间的差值,用方程式表示:
[0029]
psi
t
(t)=etao(t)-ata
t
=(ttgo(t)+t)-ata
t
[0030]
其中,ata
t
为目标航空器到达目标实现点时的实际到达时间;在时间t时航空器的航行位置点正交投影到水平路径上,可获得时刻t时的沿轨迹位置点,以确定在时间t时本机航空器和目标航空器的目标到达时间ttg;
[0031]
(45)时间t时距离的预测间距间隔psis(t)是指当目标航空器预计飞越目标实现点时,本机航空器在t时刻距目标实现点的预计沿轨迹距离的长度,用方程式表示:
[0032][0033]
其中,psis(t)为距离预测间隔,s
abp
为目标实现点处的距离值,ttgo(t)-ttg
t
(t)是依据本机航空器的参考轨迹得到的本机航空器沿航路位置点处的目标到达时间,为本机航空器的参考轨迹位置点距目标实现点的距离。
[0034]
进一步地,所述步骤(5)实现过程如下:
[0035]
在基于时间的指定间隔
△
t
的自主间隔控制实现阶段,确定本机航空器的参考目标到达时间后,分别映射计算本机航空器参考轨迹上的沿航路位置点和该位置校准空速计算航空器自主间隔控制律校准空速用方程式表示为用于计算判断沿路径位置和当前位置的校准空速;其中,k
ttg
是等于0.008sec-1
的控制增益;
[0036]
本机航空器的参考目标到达时间的确定方法为,如果|e(t)|《e
threshold
(|so(t)-s
abp
|),则否则其中e
threshold
(|so(t)-s
abp
|)为本机航空器当前沿路径位置到目标实现点间距离的误差阈值,误差阈值e
threshold
(|so(t)-s
abp
|)是本机航空器到目标实现点的沿水平轨迹距离的线性函数;预测间距误差项e(t)为ttg与指定间隔
△
t
间的差值,此值相当于时间预测间距间隔psi
t
(t)与指定间隔
△
t
之间的差值,方程式表示为e(t)=ttgo(t)-(ttg
t
(t)+
△
t
);
[0037]
在基于距离的指定间隔
△s的自主间隔控制实现阶段,该控制方法与基于时间的指定间隔
△s的控制方法相同,控制律的设计是用于实时计算匹配控制参考位置点和本机航空器参考轨迹的校准空速cas,参考位置点和cas是由参考目标到达时间ttg*映射得到,用方程式表示为
[0038]
在确定方程式中本机航空器的参考目标到达时间时,如果则否则,表示从沿航路位置s=s
abp
‑△s到目标实现点的本机航空器的参考轨迹上的ttg。
[0039]
进一步地,所述步骤(6)实现过程如下:
[0040]
在基于时间的指定间隔
△
的自主间隔控制保持阶段,使用基于时间的控制算法:保持阶段本机航空器和目标航空器航行于同一条航线上,然后与目标航空器在时间t
‑△
t
时的地速匹配,时间控制算法是以地速作为控制值,用方程式表示为:
[0041][0042]
其中,控制增益k
th
为0.005sec-1
,指定目标间隔
△
t
为自主间隔控制中本机航空器与目标航空器之间需要保持的最小间距间隔;时间控制算法误差e(t)是目标航空器在时间t
‑△
t
上沿航路位置点和时间t时的本机航空器的沿航路位置点之间的差值e(t)=s
t
(t
‑△
t
)-so(t);
[0043]
在基于距离的指定间距目标的自主间隔控制的保持阶段,使用距离保持算法:保持阶段本机航空器和目标航空器航行于同一条航线上,然后与目标航空器的地速相匹配;距离保持算法的输出值同为地速,用方程式表示为:
[0044][0045]
其中,距离保持算法控制增益k
sk
为0.005sec-1
,算法误差e(t)是在时间t时目标航空器和所本机航空器的沿航路位置点与指定间隔目标
△s之间的差e(t)=s
t
(t)-so(t)
‑△s。
[0046]
有益效果:与现有技术相比,本发明的有益效果:本发明在两航空器之间计算机动飞行控制律实现航空器间的自主间隔控制以保持航空器间有效间隔空间,可实现将空中交通管制员所承担的间隔保证任务部分或完全授权给机组承担,有效提升空域航行航空器的航行效率与运行密度。
附图说明
[0047]
图1是本发明的流程图;
[0048]
图2是水平轨迹的生成示意图;
[0049]
图3是生成地速剖面的流程示意图;
[0050]
图4是生成参考轨迹的流程示意图;
[0051]
图5是实现阶段两航空器位于不同航路且即将交汇于同一航路的时间间隔控制方法示意图;
[0052]
图6是实现阶段两航空器基于时间的位于同一航路航行的时间间隔控制方法示意图;
[0053]
图7是实现阶段两航空器的距离间隔控制方法示意图;
[0054]
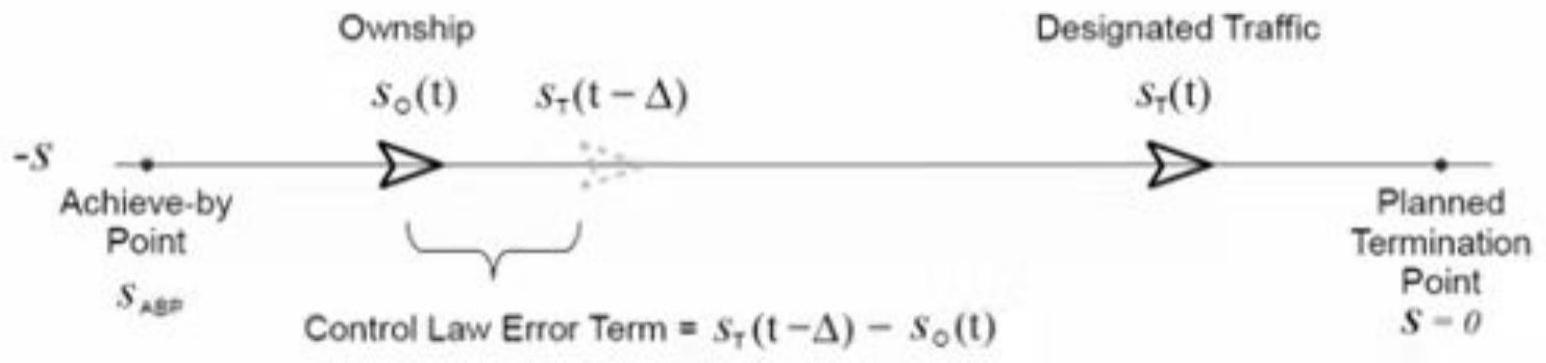
图8是保持阶段两航空器的指定时间间隔控制方法示意图;
[0055]
图9是保持阶段两航空器的指定距离间隔控制方法示意图。
具体实施方式
[0056]
下面结合附图对本发明做进一步详细说明。
[0057]
本发明提供一种基于ads-b的航空器自主间隔控制方法,接收ads-b航空器航行状态信息并依据空管导航数据库中的预计飞行路径信息ifpi,得到航路水平轨迹与地速剖面以生成航空器参考轨迹;利用参考轨迹中航路距离信息及速度信息,依据航空器ads-b定位信息中的当前航行经纬度点匹配参考轨迹的位置点,基于基本运动学原理结合地速剖面图计算得到本机航空器和目标航空器从当前航路位置点到达自主间隔计划终止点的目标到达时间ttg,进而基于目标到达时间ttg的自主间隔控制律算法来进行im自主间隔控制。如
图1所示,具体包括以下步骤:
[0058]
步骤1:依据ads-b航空器航行状态信息及空管预计航空器飞行路径信息,生成航路水平轨迹。
[0059]
依据预计飞行路径信息ifpi元素得到航空器预计飞行航线上的各航路点的经纬度、速度、高度信息,并以此信息初步得到航路点序列。
[0060]
利用各航路点序列信息依次判断得出航路点间航段的直线或转弯的类型,计算本机航空器与目标航空器的航段信息元素并依次连接航路点序列得到水平轨迹。
[0061]
将航路点纬度和经度转换为x、y坐标,即坐标系之间进行转换。确定航路点序列后,将航路点坐标从大地坐标(纬度和经度)转换为东-北-天(enu)坐标系(站心坐标系),其中x表示东方向的位置,y表示北方向的位置。大地坐标首先转换为地心地固(ecef)坐标系,然后ecef坐标转换为本地enu坐标。假定航路点序列中的最后一个航路点的坐标为(x,y,z)=(0,0,0).每个航路点的enu坐标通过添加(dx
i-1
,dy
i-1
,dz
i-1
)至(xi,yi,zi),从最后一个航路点开始,直到到达航路点序列中的第一个航路点。
[0062]
如果自主间隔净空类型为最终进近间距,使用直线段交点方程计算交汇点,直线段由最终进近航线和截获最终进近航线矢量上航空器的地面航迹投影定义。最终进近航向上航空器的直线投影由航空器在最终进近航段上的投影位置(x1,y1)和目标实现点(x2,y2)确定。截获最终进近航线矢量上航空器的直线投影由航空器的当前位置(x3,y3)和沿θ
merge
的航线在d=50nm处的位置(x4,y4)定义,用方程式表示然后使用四个点计算交汇点位置,用方程式表示:
[0063][0064][0065]
其中,点(x
merge
,y
merge
)为最终进近交汇点坐标;计算交汇点(x
merge
,y
merge
)位置后,生成矢量上航空器的航路点序列和参考轨迹,确定航路点之间的航向变化角度。使用每个航路点的(x,y)坐标计算两航路点之间的航向,用方程式表示为
[0066]
计算自主间隔航空器转弯时的转弯半径。如果转弯半径是通过rf段或frt指定的,则可以由转弯中心到终点的距离作为转弯半径。否则,两条连续航向改变的航段之间的转弯半径的计算方法为转弯时假定的地速和转弯时假定的倾斜角度的函数,用方程式表示:
[0067][0068]
其中,v
gs
为假定的地速,g为重力加速度,以及φ是转弯时假定的倾斜角度,用方程式表示
[0069]
计算自主间隔航空器转弯的起点、终点和中心点。如果将转弯指定为rf段,则在导航数据库中指定转弯中心和转弯终点,并将转弯起点定义为先前一段的终点。否则,使用转
弯半径和各航段之间的航向变化,相对于航路点和转弯中心计算转弯的起点和终点。
[0070]
确定自主间隔航空器航行的水平路径。对于两条连续的直线段,水平轨迹转换点(hpt)为两条直线段之间的航路点。从第j
th
hpt到计划终止点的沿航路距离是第(j-1)
th
hpt的沿航路距离与第j
th
和第(j-1)
th
hpt之间的距离之和。对于未指定为rf航段的两条航段之间的转弯段,有两个hpt标记每个转弯的开始和结束。从转弯起点开始的沿航路距离是从最后一个hpt到转弯终点的距离加上从最后一个hpt到计划终点的沿航路距离,如图2所示。
[0071]
步骤2:计算各航路点距自主间隔计划终止点的沿水平轨迹航行行程距离dtg,生成各航路点序列间不同轨迹段地速剖面并得到航路航行参考轨迹。
[0072]
依据各航路点元素间的距离值依次累加计算各个航路点到自主间隔计划终止点的沿水平轨迹航行行程距离:
[0073][0074][0075]
其中,(x0,y0)为方法所设定的自主间隔计划终止点坐标,dtgi为由自主间隔计划终止点向后推第i个航路点距自主间隔计划终止点的行程距离长度。
[0076]
依据航路点序列中各航路点的预计速度信息v及计算得到的各航路点的dtg,生成各航路点序列间不同轨迹段的航空器速度v关于距离dtg的地速剖面,如图3所示。地速剖面是通过积分一组沿航路位置、高度和真空速随时间变化的常微分方程生成的。地速剖面是通过组合轨迹段来构建的,轨迹段是使用基本运动学关系定义的。每个轨迹段的输出是沿航路位置(ds/dt)、高度(dh/dt)和tas(dv
tas
/dt)作为时间函数的导数,然后将其与时间进行积分。使用欧拉(一阶)积分方法对ds/dt、dh/dt和dv
ta
/dt进行积分。因为微分方程是相对于时间向后积分的,所以时间步长为负(
△
t=-1s);用方程式表示:
[0077][0078][0079][0080]
沿航路位置(s)、高度(h)、校准空速(v
cas
)、地速,气动飞行轨迹角和垂直速度(dh/dt)作为时间t的函数。
[0081]
结合水平轨迹与地速剖面,水平轨迹各点对应坐标与地速值,得到航路航行参考轨迹,如图4所示。
[0082]
步骤3:利用参考轨迹中航路距离信息及速度信息及航空器ads-b定位信息中的当前航行经纬度点匹配参考轨迹的位置点,基于基本运动学原理结合地速剖面图计算得到本机航空器和目标航空器从当前航路位置点到达自主间隔计划终止点的目标到达时间ttg。
[0083]
依据航路点序列中各航路点的预计速度信息v及计算得到的各航路点的dtg,生成各航路点序列间不同轨迹段的航空器速度v关于距离dtg的地速剖面,结合水平轨迹与所对应地速剖面得到航路航行参考轨迹;利用参考轨迹中航路距离信息及速度信息,依据航空器ads-b定位信息中的当前航行经纬度点匹配参考轨迹的位置点;基于基本运动学原理结
合地速剖面图计算得到本机航空器和目标航空器从当前航路位置点到达自主间隔目标点的到达时间ttg:
[0084][0085]
其中,v
gs
为航空器飞行地速,为地速剖面图中得到的地速对于点(x0,y0)到点(xi,yi)的距离s的积分;进而基于目标到达时间ttg的航空器自主间隔控制算法来进行im自主间隔在实现阶段的间隔预测与速度保持控制。
[0086]
步骤4:计算本机航空器与目标航空器间的预测间距间隔。
[0087]
间隔预测分别针对时间意义上的间隔管理与空间意义上的间隔管理,分为基于时间的间隔预测和基于距离的间隔预测。基于时间的间隔预测以时间预测间距为预测目标进行时间意义上的间隔预测。时间预测间距是指在目标航空器通过目标实现点后而本机航空器在到达目标实现点前,本机航空器在目标实现点的预计到达时间eta与目标航空器在到达目标实现点时的实际到达时间ata之间的差值。为了确定在时间t时本机航空器和目标航空器的ttg,将在时间t时各航空器的水平位置点正交投影到水平路径上,以获得在时刻t时的沿航迹位置。相同地,基于距离的指定目标间隔预测,是以距离为预测目标进行空间意义上的间隔预测。时间t时的空间预测间距间隔是指当目标航空器预计飞越目标实现点时,本机航空器在t时刻距目标实现点的预计沿轨迹距离的长度。当本机航空器与目标航空器即将汇聚进入同一航路航行,此时两航空器虽在两不同航路上航行但仍存在较大的航空器间冲突隐患问题,需对此情形进行自主间隔控制的模型建立,如图5所示。针对连接远程、繁忙航线城市对的空中高速路具有航路单向、无交叉的特点,当本机航空器和目标航空器位于飞往目标实现点的共同的航线上时如图6所示。
[0088]
在目标航空器到达预先设定的目标实现点之前,时间t时的预测时间间隔psi
t
(t)是指,在时间t时本机航空器到达目标实现点的目标到达时间ttg与目标航空器到达目标实现点的ttg之间的差值,用方程式表示:
[0089]
psi
t
(t)=etao(t)-eta
t
(t)=ttgo(t)-ttg
t
(t)
[0090]
其中,psi
t
(t)为预测时间间隔,etao(t)为本机航空器预计到达目标实现点的时间,eta
t
(t)为目标航空器预计到达目标实现点的时间,ttgo(t)为本机航空器的目标到达时间,ttg
t
(t)为目标航空器的目标到达时间;
[0091]
目标航空器已通过目标实现点但本机航空器并未到达目标实现点,时间t时的预测间隔psi
t
(t)为本机航空器在目标实现点的预计到达时间eta与目标航空器在到达目标实现点时的所实际到达时间ata之间的差值,用方程式表示:
[0092]
psi
t
(t)=etao(t)-ata
t
=(ttgo(t)+t)-ata
t
[0093]
其中,ata
t
为目标航空器到达目标实现点时的实际到达时间;在时间t时航空器的航行位置点正交投影到水平路径上,可获得时刻t时的沿轨迹位置点,以确定在时间t时本机航空器和目标航空器的目标到达时间ttg;
[0094]
时间t时距离的预测间距间隔psis(t)是指当目标航空器预计飞越目标实现点时,
本机航空器在t时刻距目标实现点的预计沿轨迹距离的长度,用方程式表示:
[0095][0096]
其中,psis(t)为距离预测间隔,s
abp
为目标实现点处的距离值,ttgo(t)-ttg
t
(t)是依据本机航空器的参考轨迹得到的本机航空器沿航路位置点处的目标到达时间,为本机航空器的参考轨迹位置点距目标实现点的距离。
[0097]
步骤5:计算航空器飞行自主间隔实现阶段的控制律速度。
[0098]
在本机航空器与目标航空器进行跟随间隔控制的实现阶段,需要有合理的速度计算调整方法,以实现本机航空器与目标航空器间在不满足安全间距间隔情形下调整本机航空器速度以改变两航空器间的有效间距,以达到自主间隔安全有效的目的。在自主间隔控制方面分别针对时间意义上的间隔与空间意义上的间隔,以基于时间的和基于距离的间距间隔为依据信息,进行自主间隔的速度计算调整。
[0099]
在基于时间的指定间隔
△
t
的自主间隔控制实现阶段,确定本机航空器的参考目标到达时间后,分别映射计算本机航空器参考轨迹上的沿航路位置点和该位置校准空速计算航空器自主间隔控制律校准空速用方程式表示为用于计算判断沿路径位置和当前位置的校准空速;其中,k
ttg
是等于0.008sec-1
的控制增益;
[0100]
本机航空器的参考目标到达时间的确定方法为,如果|e(t)|《e
threshold
(|so(t)-s
abp
|),则否则其中e
threshold
(|so(t)-s
abp
|)为本机航空器当前沿路径位置到目标实现点间距离的误差阈值,误差阈值e
threshold
(|so(t)-s
abp
|)是本机航空器到目标实现点的沿水平轨迹距离的线性函数;预测间距误差项e(t)为ttg与指定间隔
△
t
间的差值,此值相当于时间预测间距间隔psi
t
(t)与指定间隔
△
t
之间的差值,方程式表示为e(t)=ttgo(t)-(ttg
t
(t)+
△
t
);
[0101]
在基于距离的指定间隔
△s的自主间隔控制实现阶段,该控制方法与基于时间的指定间隔
△s的控制方法相同,控制律的设计是用于实时计算匹配控制参考位置点和本机航空器参考轨迹的校准空速cas,参考位置点和cas是由参考目标到达时间ttg*映射得到,用方程式表示为
[0102]
在确定方程式中本机航空器的参考目标到达时间时,如果则否则,否则,表示从沿航路位置s=s
abp
‑△s到目标实现点的本机航空器的参考轨迹上的ttg,具体如图7所示。
[0103]
步骤6:计算航空器飞行自主间隔保持阶段的控制律速度。
[0104]
在基于时间的指定间隔
△
t
的自主间隔控制保持阶段,使用基于时间的控制算法:如图8所示,保持阶段本机航空器和目标航空器航行于同一条航线上,然后与目标航空器在时间t
‑△
t
时的地速匹配,时间控制算法是以地速作为控制值,用方程式表示为:
[0105][0106]
其中,控制增益k
th
为0.005sec-1
,指定目标间隔
△
t
为自主间隔控制中本机航空器与目标航空器之间需要保持的最小间距间隔;时间控制算法误差e(t)是目标航空器在时间t
‑△
t
上沿航路位置点和时间t时的本机航空器的沿航路位置点之间的差值,用方程式表示为e(t)=s
t
(t
‑△
t
)-so(t);
[0107]
在基于距离的指定间距目标的自主间隔控制的保持阶段,使用距离保持算法:如图9所示,保持阶段本机航空器和目标航空器航行于同一条航线上,然后与目标航空器的地速相匹配;距离保持算法的输出值同为地速,用方程式表示为:
[0108][0109]
其中,距离保持算法控制增益k
sk
为0.005sec-1
,算法误差e(t)是在时间t时目标航空器和所本机航空器的沿航路位置点与指定间隔目标
△s之间的差,用方程式表示e(t)=s
t
(t)-so(t)
‑△s。
[0110]
以上仅为本发明较佳实施例而已,不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1