一种工地内车辆行驶信息化管控系统及方法与流程
1.本发明属于建筑施工管控领域,特别涉及一种工地内车辆行驶信息化管控系统及方法。
背景技术:
2.车辆超速违规行驶一直是导致交通事故的主要原因之一。目前主要违规现象有两种,一是超速,工地车辆不得超过20km/h,部分工地严格要求到5km/h,二是右转不停。2021年上海市全面推行集卡右转必停”。要求集装箱运输企业严格落实“右转必停”措施,否则将采取“黑名单”等形式进行监管、查处;且在43个路口推行”大型货车右转必停”,违者记3分罚款200元。
3.相对于普通道路,工地内一般道路狭窄,人车混行,且缺乏有效监管手段,工地范围内超速、违规行驶会对工人正常行走产生巨大风险。
4.因此,如何提供能够实现工地范围内车辆限速管理,大型施工车辆右转必停的工地内车辆行驶信息化管控系统及方法,已成为本领域亟待解决一个技术问题。
技术实现要素:
5.本发明旨在发明一种工地内车辆行驶信息化管控系统及方法,能够实现工地范围内车辆限速管理和大型施工车辆右转必停管控,解决现有工地内车辆行驶管控自动化程度低的问题。
6.为解决上述技术问题,本发明提供如下技术方案:
7.一种工地内车辆行驶信息化管控系统,包括:若干摄像机、若干地感线圈、单片机以及中央处理系统,在工地内交通路口的各个方向道路上均布置一所述摄像机和一所述地感线圈,所述摄像机分别与所述中央处理系统进行通讯连接,中央处理系统能够根据摄像机抓拍的车辆图片判断车辆的车辆类型并且能够根据两个摄像机抓拍的车辆图片、抓拍时间以及两个摄像机对应的道路距离计算车辆是否超速,所述地感线圈均与所述单片机连接,所述单片机与所述中央处理系统连接,所述单片机能够采集各地感线圈对车辆的电磁感应时间,中央处理系统根据地感线圈对车辆的电磁感应时间判断车辆是否进行停车,中央处理系统根据路口两个摄像机抓拍的车辆图片、抓拍时间以及两个摄像机之间的位置关系判断车辆是不是右转,当车辆超速,则将抓拍的车辆图片留档并进行报警,当车辆右转且没有停车,则将抓拍的车辆图片留档并进行报警。
8.优选的,在上述的工地内车辆行驶信息化管控系统中,各地感线圈呈八字形,各地感线圈的一端分别与单片机上对应的输入端口连接,各地感线圈的另一端分别和单片机上的输出端口连接或者经其他地感线圈和单片机上的输出端口连接,车辆经过地感线圈时,对应的地感线圈发生电磁感应,引起单片机上对应输入端口的电量信号发生变化,地感线圈对车辆的电磁感应时间是指对应输入端口的电量信号发生变化的时间,根据对应输入端口电量信号变化的时间判断车辆是否进行停车。
9.优选的,在上述的工地内车辆行驶信息化管控系统中,所述路口是十字路口或者丁字路口,十字路口需要四个地感线圈和四个摄像机,丁字路口需要三个地感线圈和三个摄像机。
10.优选的,在上述的工地内车辆行驶信息化管控系统中,摄像机采用立杆安装,立杆距离道路边0.5-1m,摄像机在立杆的安装高度在2.5-3.5m,地感线圈采用铜芯线,埋设在道口附近地面,地感线圈采用8字型安装,地感线圈的宽度方向长度至少1m,地感线圈的长度方向长度覆盖整个道路横截面,埋设深度为道面以下30-50mm以内,地感线圈通过外接供电确保电磁量在100-300uh。
11.优选的,在上述的工地内车辆行驶信息化管控系统中,摄像机采用立杆安装,立杆距离道路边0.5-1m,摄像机在立杆的安装高度在2.5-3.5m,地感线圈采用铜芯线,埋设在道口附近地面,地感线圈采用8字型安装,地感线圈的宽度方向长度至少1m,地感线圈的长度方向长度覆盖整个道路横截面,埋设深度为道面以下30-50mm以内,地感线圈通过外接供电确保电磁量在100-300uh。
12.本发明还公开了一种工地内车辆行驶信息化管控方法,包括如下步骤:
13.步骤1,在工地内交通路口设置一工地内车辆行驶信息化管控系统,所述工地内车辆行驶信息化管控系统包括若干摄像机、若干地感线圈、单片机以及中央处理系统,在工地内交通路口的各个方向道路上均布置一所述摄像机和一所述地感线圈,所述摄像机分别与所述中央处理系统进行通讯连接,所述地感线圈均与所述单片机连接,所述单片机与所述中央处理系统连接,所述单片机能够采集各地感线圈对车辆的电磁感应时间,所述中央处理系统能够根据地感线圈对车辆的电磁感应时间判断车辆是否进行停车;
14.步骤2,通过所述工地内车辆行驶信息化管控系统对经过路口的车辆进行管控,具体包括如下步骤:
15.步骤21,路口的各条道路上的摄像机抓拍来路口的车辆,摄像机将抓拍的车辆图片以及抓拍时间发送至中央处理系统;
16.步骤22,中央处理系统根据抓拍的车辆图片,判断所述车辆的车辆类型是大型车辆还是小型车辆,如果是小型车辆,进行步骤23,如果是大型车辆,进行步骤24;
17.步骤23,对车辆进行车速判断,如果车辆超速,进行报警并将抓拍的车辆图片留档,如果没有超速,对车辆放行;
18.步骤24,对车辆进行停车判断,如果车辆有停车,则对车辆进行车速判断,如果车辆超速,进行报警并将抓拍的车辆图片留档,如果车辆没有超速,对车辆放行;如果车辆没有停车,则对车辆进行右转判断,如果车辆是右转,进行报警并将抓拍的车辆图片留档,如果车辆不是右转,则对车辆进行车速判断,如果车辆超速,进行报警并将抓拍的车辆图片留档,如果车辆没有超速,对车辆放行。
19.优选的,在上述的工地内车辆行驶信息化管控方法中,所述路口是十字路口或者丁字路口,十字路口需要四个地感线圈和四个摄像机,丁字路口需要三个地感线圈和三个摄像机。
20.优选的,在上述的工地内车辆行驶信息化管控方法中,各地感线圈呈八字形,各地感线圈的一端分别与单片机上对应的输入端口连接,各地感线圈的另一端分别和单片机上的输出端口连接或者经其他地感线圈和单片机上的输出端口连接。
21.优选的,在上述的工地内车辆行驶信息化管控方法中,车辆经过地感线圈时,对应的地感线圈发生电磁感应,引起单片机上对应输入端口的电量信号发生变化,地感线圈对车辆的电磁感应时间是指对应输入端口电量信号变化的时间,根据对应输入端口电量信号变化的时间判断车辆是否进行停车。
22.优选的,在上述的工地内车辆行驶信息化管控方法中,所述中央处理系统根据路口两个摄像机抓拍的车辆图片、抓拍时间以及两个摄像机之间的位置关系判断车辆是不是右转。
23.优选的,在上述的工地内车辆行驶信息化管控方法中,所述中央处理系统根据摄像机抓拍的车辆图片判断车辆的车辆类型。
24.优选的,在上述的工地内车辆行驶信息化管控方法中,所述中央处理系统根据两个摄像机抓拍的车辆图片、抓拍时间以及两个摄像机对应的道路距离计算车辆是否超速。
25.由以上公开的技术方案可知,与现有技术相比,本发明的有益效果如下:
26.本发明提供的一种工地内车辆行驶信息化管控系统,包括:若干摄像机、若干地感线圈、单片机以及中央处理系统,在工地内交通路口的各个方向道路上均布置一所述摄像机和一所述地感线圈,所述摄像机分别与所述中央处理系统进行通讯连接,中央处理系统能够根据摄像机抓拍的车辆图片判断车辆的车辆类型并且能够根据两个摄像机抓拍的车辆图片、抓拍时间以及两个摄像机对应的道路距离计算车辆是否超速,所述地感线圈均与所述单片机连接,所述单片机与所述中央处理系统连接,所述单片机能够采集各地感线圈对车辆的电磁感应时间,中央处理系统根据地感线圈对车辆的电磁感应时间判断车辆是否进行停车,中央处理系统根据路口两个摄像机抓拍的车辆图片、抓拍时间以及两个摄像机之间的位置关系判断车辆是不是右转,当车辆超速,则将抓拍的车辆图片留档并进行报警,当车辆右转且没有停车,则将抓拍的车辆图片留档并进行报警,其具备无人化管理、自动报警,违规拍照存档等功能,可以实现工地范围内车辆限速信息化管理和针对作业车辆的右转必停管理。
附图说明
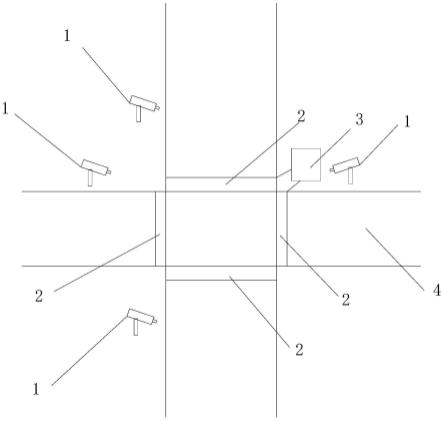
27.图1是本发明一种工地内车辆行驶信息化管控系统的结构示意图(十字路口)。
28.图2是地感线圈和单片机的连接示意图(十字路口)。
29.图3是地感线圈在道路的平面布置图。
30.图4是工地内车辆行驶信息化管控系统的结构示意图(丁字路口)。
31.图5是地感线圈和单片机的连接示意图(丁字路口)。
32.图中:1-摄像机、2-地感线圈、3-单片机、4-道路。
具体实施方式
33.以下结合附图和具体实施例对本发明作进一步详细说明。以下将由所列举之实施例结合附图,详细说明本发明的技术内容及特征。需另外说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。为叙述方便,下文中所述的“上”、“下”与附图的上、下的方向一致,但这不能成为本发明技术方案的限制。
34.请参阅图1至图5,本实施例公开了一种工地内车辆行驶信息化管控系统,包括:若干摄像机1、若干地感线圈2、单片机3以及中央处理系统(未图示),在工地内交通路口的各个方向道路4上均布置一所述摄像机1和一所述地感线圈2,所述摄像机1分别与所述中央处理系统进行通讯连接,中央处理系统能够根据摄像机1抓拍的车辆图片判断车辆的车辆类型并且能够根据两个摄像机1抓拍的车辆图片、抓拍时间以及两个摄像机1对应的道路距离(即两个摄像机拍到同一车辆该车辆所需经过的距离)计算车辆是否超速,所述地感线圈2均与所述单片机3连接,所述单片机3与所述中央处理系统连接,所述单片机3能够采集各地感线圈2对车辆的电磁感应时间,中央处理系统根据地感线圈2对车辆的电磁感应时间判断车辆是否进行停车,中央处理系统根据路口两个摄像机1抓拍的车辆图片、抓拍时间以及两个摄像机1之间的位置关系判断车辆是不是右转,当车辆超速,则将抓拍的车辆图片留档并进行报警,当车辆右转且没有停车,则将抓拍的车辆图片留档并进行报警。
35.本发明提供的一种工地内车辆行驶信息化管控系统,包括:若干摄像机1、若干地感线圈2、单片机3以及中央处理系统,在工地内交通路口的各个方向道路4上均布置一所述摄像机1和一所述地感线圈2,所述摄像机1分别与所述中央处理系统进行通讯连接,中央处理系统能够根据摄像机1抓拍的车辆图片判断车辆的车辆类型并且能够根据两个摄像机1抓拍的车辆图片、抓拍时间以及两个摄像机1对应的道路距离计算车辆是否超速,所述地感线圈2均与所述单片机3连接,所述单片机3与所述中央处理系统连接,所述单片机3能够采集各地感线圈2对车辆的电磁感应时间,中央处理系统根据地感线圈2对车辆的电磁感应时间判断车辆是否进行停车,中央处理系统根据路口两个摄像机1抓拍的车辆图片、抓拍时间以及两个摄像机1之间的位置关系判断车辆是不是右转,当车辆超速,则将抓拍的车辆图片留档并进行报警,当车辆右转且没有停车,则将抓拍的车辆图片留档并进行报警,其具备无人化管理、自动报警,违规拍照存档等功能,可以实现工地范围内车辆限速信息化管理和针对作业车辆的右转必停管理。
36.优选的,在上述的工地内车辆行驶信息化管控系统中,所述路口是十字路口或者丁字路口,请参阅图1,十字路口需要四个地感线圈2和四个摄像机1,请参阅图4,丁字路口需要三个地感线圈2和三个摄像机1。
37.优选的,在上述的工地内车辆行驶信息化管控系统中,各地感线圈2呈八字形,各地感线圈2的一端分别与单片机3上对应的输入端口连接,各地感线圈2的另一端分别和单片机3上的输出端口连接或者经其他地感线圈2和单片机3上的输出端口连接,车辆经过地感线圈2时,对应的地感线圈2发生电磁感应,引起单片机3上对应输入端口的电量信号发生变化,地感线圈2对车辆的电磁感应时间是指对应输入端口的电量信号发生变化的时间,根据对应输入端口电量信号变化的时间判断车辆是否进行停车。本实施例中,当地感线圈2对车辆的电磁感应时间大于等于3s,认为车辆进行了停车。当感应时间小于3s,可以认为车辆没有进行停车。
38.优选的,在上述的工地内车辆行驶信息化管控方法中,所述中央处理系统根据路口两个摄像机1抓拍的车辆图片、抓拍时间以及两个摄像机1之间的位置关系判断车辆是不是右转。对于抓拍到相同车辆的两个摄像机1,如果抓拍时间晚的摄像机1位于抓拍时间早的摄像机1的右侧,则判断车辆是右转;如果抓拍时间晚的摄像机1不是位于抓拍时间早的摄像机1的右侧,则判断车辆不是右转。
39.优选的,在上述的工地内车辆行驶信息化管控系统中,所述中央处理系统根据摄像机1抓拍的车辆图片判断车辆的车辆类型。中央处理系统通过对摄像机1抓拍的车辆图片进行图像识别,能够判断车辆的车辆类型是大型车辆还是小型车辆。
40.优选的,在上述的工地内车辆行驶信息化管控系统中,所述中央处理系统根据两个摄像机1抓拍的车辆图片、抓拍时间以及两个摄像机1对应的道路距离计算车辆是否超速。对于抓拍到相同车辆的两个摄像机1,通过两个摄像机1抓拍的车辆图片判断同一车辆两个摄像机1的抓拍时间,通过所述两个摄像机1对应的道路距离除以同一车辆两个摄像机1的抓拍时间差,计算得到所述车辆在两个摄像机1的平均速度,所述车辆在两个摄像机1的平均速度小于等于工地车辆的允许速度时,车辆没有超速,反之,车辆超速。本实施例中,工地车辆的允许速度是20km/h,工地车辆不得超过20km/h。
41.优选的,在上述的工地内车辆行驶信息化管控系统中,摄像机1应当采用立杆安装,立杆距离道路边0.5-1m,摄像机在立杆的安装高度在2.5-3.5m,确保摄像机1辐射范围囊括道路整个横断面.
42.优选的,在上述的工地内车辆行驶信息化管控系统中,地感线圈2采用铜芯线,埋设在道口附近地面,地感线圈2应8字型安装,如图3所示,地感线圈2的宽度方向长度l至少1m,地感线圈2的长度方向长度覆盖整个道路横截面,埋设深度为道面以下30-50mm,通过外接供电确保电磁量在100-300uh,本实施例中,各地感线圈通过单片机供电。
43.请继续参阅图1-图5,本实施例还公开了一种工地内车辆行驶信息化管控方法,包括如下步骤:
44.步骤1,在工地内交通路口设置一工地内车辆行驶信息化管控系统,所述工地内车辆行驶信息化管控系统包括若干摄像机1、若干地感线圈2、单片机3以及中央处理系统,在工地内交通路口的各个方向道路4上均布置一所述摄像机1和一所述地感线圈2,所述摄像机1分别与所述中央处理系统进行通讯连接,所述地感线圈2均与所述单片机3连接,所述单片机3与所述中央处理系统连接,所述单片机3能够采集各地感线圈2对车辆的电磁感应时间,所述中央处理系统能够根据地感线圈2对车辆的电磁感应时间判断车辆是否进行停车;
45.步骤2,通过所述工地内车辆行驶信息化管控系统对经过路口的车辆进行管控,具体包括如下步骤:
46.步骤21,路口的各条道路4上的摄像机1抓拍来路口的车辆,摄像机1将抓拍的车辆图片以及抓拍时间发送至中央处理系统;
47.步骤22,中央处理系统根据抓拍的车辆图片,判断所述车辆的车辆类型是大型车辆还是小型车辆,如果是小型车辆,进行步骤23,如果是大型车辆,进行步骤24;
48.步骤23,对车辆进行车速判断,如果车辆超速,进行报警并将抓拍的车辆图片留档,如果没有超速,对车辆放行。
49.步骤24,对车辆进行停车判断,如果车辆有停车,则对车辆进行车速判断,如果车辆超速,进行报警并将抓拍的车辆图片留档,如果车辆没有超速,对车辆放行;如果车辆没有停车,则对车辆进行右转判断,如果车辆是右转,进行报警并将抓拍的车辆图片留档,如果车辆不是右转,则对车辆进行车速判断,如果车辆超速,进行报警并将抓拍的车辆图片留档,如果车辆没有超速,对车辆放行。
50.本实例中,大型车辆和小型车辆采用不同标准限速,小型车辆工地限速20km/h,大
型车辆工地限速5km/h,后台根据摄像机抓拍的照片判断车型类型后,根据两个摄像头对应的道路距离(即两个摄像机拍到同一车辆该车辆所需经过的距离)之间的车辆所需要经过的距离,则两个对应摄像机抓拍时间间隔不得大于0.018s秒(小型车辆)、0.072s秒(作业车辆),违规系统报警,抓拍照片留档
51.优选的,在上述的工地内车辆行驶信息化管控方法中,所述路口是十字路口或者丁字路口,十字路口需要四个地感线圈2和四个摄像机1,丁字路口需要三个地感线圈2和三个摄像机1。
52.优选的,在上述的工地内车辆行驶信息化管控方法中,各地感线圈2呈八字形,各地感线圈2的一端分别与单片机3上对应的输入端口连接,各地感线圈2的另一端分别和单片机3上的输出端口连接或者经其他地感线圈2和单片机3上的输出端口连接。
53.优选的,在上述的工地内车辆行驶信息化管控方法中,车辆经过地感线圈2时,对应的地感线圈2发生电磁感应,引起单片机3上对应输入端口的电量信号发生变化,地感线圈2对车辆的电磁感应时间是指对应输入端口电量信号变化的时间,根据对应输入端口电量信号变化的时间判断车辆是否进行停车。本实施例中,当地感线圈2对车辆的电磁感应时间大于等于3s,认为车辆进行了停车。当感应时间小于3s,可以认为车辆没有进行停车。
54.优选的,在上述的工地内车辆行驶信息化管控方法中,所述中央处理系统根据路口两个摄像机1抓拍的车辆图片、抓拍时间以及两个摄像机1之间的位置关系判断车辆是不是右转。对于抓拍到相同车辆的两个摄像机1,如果抓拍时间晚的摄像机1位于抓拍时间早的摄像机1的右侧,则判断车辆是右转;如果抓拍时间晚的摄像机1不是位于抓拍时间早的摄像机1的右侧,则判断车辆不是右转。
55.优选的,在上述的工地内车辆行驶信息化管控方法中,所述中央处理系统根据摄像机1抓拍的车辆图片判断车辆的车辆类型。中央处理系统通过对摄像机1抓拍的车辆图片进行图像识别,能够判断车辆的车辆类型是大型车辆还是小型车辆。
56.优选的,在上述的工地内车辆行驶信息化管控方法中,所述中央处理系统根据两个摄像机1抓拍的车辆图片、抓拍时间以及两个摄像机1对应的道路距离计算车辆是否超速。对于抓拍到相同车辆的两个摄像机1,通过两个摄像机1抓拍的车辆图片判断同一车辆两个摄像机1的抓拍时间,通过所述两个摄像机1对应的道路距离除以同一车辆两个摄像机1的抓拍时间差,计算得到所述车辆在两个摄像机1的平均速度,所述车辆在两个摄像机1的平均速度小于等于工地车辆的允许速度时,车辆没有超速,反之,车辆超速。本实施例中,工地车辆的允许速度是20km/h,工地车辆不得超过20km/h。
57.优选的,在上述的工地内车辆行驶信息化管控方法中,摄像机1应当采用立杆安装,立杆距离道路边0.5-1m,摄像机在立杆的安装高度在2.5-3.5m,确保摄像机1辐射范围囊括道路整个横断面。
58.优选的,在上述的工地内车辆行驶信息化管控方法中,地感线圈2采用铜芯线,埋设在道口附近地面,地感线圈2应8字型安装,如图3所示,地感线圈2的宽度方向长度l至少1m,地感线圈2的长度方向长度覆盖整个道路横截面,埋设深度为道面以下30-50mm,通过外接供电确保电磁量在100-300uh,本实施例中,各地感线圈通过单片机供电。
59.优选的,在上述的工地内车辆行驶信息化管控方法中,所述摄像机1是4g测速摄像机,中央处理系统可以通过api接口协议对接微信公众号,当发现车辆超速和右转未停车
时,直接将通过4g网络进行微信公众号报警,并将抓拍图片进行发送,实现无线自动报警。
60.优选的,在上述的工地内车辆行驶信息化管控方法中,通过安装4g物联网卡进行无线信号传输,实现无线发送抓拍照片的指令以及将报警信息和抓拍照片发送至微信公众号。
61.上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1