一种航行体跨区域信息交互能力实时测评方法与流程
1.本发明涉及跨区域信息协同试验测评技术领域,具体涉及一种航行体跨区域信息交互能力实时测评方法。
背景技术:
2.近年来,随着移动互联网、大数据、物联网、云计算等新兴科学技术的发展,ugv、uav、usv、uuv等多种陆上、空中、水面、水下航行体在多域互联能力方面大幅提升,使得跨区域交互协同成为可能。
3.信息交互具有多源性、多样性、随机性、高维复杂性、集群性、弱可观测性等特点,故信息交互能力的测评难度大。当前针对信息交互能力的测评主要依托对比试验后各航行体内测数据,评估分析数据量大、数据形式多,对分析评估技术人员的专业性、综合性要求较高;同时,由于试后内测数据自证的方式,第三方测试评估方法缺失,致使评估的时效性差、评估有效性难确定。
技术实现要素:
4.针对上述问题,发明人提供了一种跨区域信息交互能力显性实时测评方法,解决跨区域信息交互能力评估难度大、时效性差、第三方测评方法缺失等问题。
5.根据第一方面,本发明提供了一种航行体跨区域信息交互能力实时测评方法,所述方法包括:
6.在各区域内的参试航行体上安装数据采集设备,参试航行体在各自的区域内待命,各区域的测试系统实时采集自身区域内的航行体的轨迹信息,并将轨迹信息上传至上位系统,上位系统将各参试航行体航行轨迹进行融合显示;
7.采用基于寻点任务的点对点方式进行状态信息交互能力测评:
8.在各区域中设置多个任务点,上位系统选取该区域中任一参试航行体下发寻其中一个任务点作为第一任务点的指令,被选取的参试航行体到达第一个任务点后,以点对点的方式向其他参试航行体发送寻该任务点信息,其他参试航行体根据接收到的任务点信息进行寻点任务;
9.状态信息交互能力正常需满足以下条件:
10.被选取的参试航行体寻点正确,且在设定时间内,其他任务区域内的参试航行体寻点也正确。
11.根据第二方面,本发明还提供了一种航行体跨区域信息交互能力实时测评方法,所述方法包括:
12.在各区域内的参试航行体上安装数据采集设备,参试航行体在各自的区域内待命,各区域的测试系统实时采集自身区域内的航行体的轨迹信息,并将轨迹信息上传至上位系统,上位系统将各参试航行体航行轨迹进行融合显示;
13.采用基于图形绘制的组网态势进行信息交互能力测评:
14.上位系统选取任一参试航行体下发态势构建指令,被选取的参试航行体进行路径规划并将自身位置信息实时广播给其他参试航行体,其他参试航行体,根据收到的实时位置信息,分析态势并进行态势构建;
15.组网态势信息交互能力正常需满足以下条件:
16.被选取的参试航行体开始动作后,且在设定反应时间内,其他参试航行体与被选取的参试航行体在关键点协同动作;
17.各航行体构建的态势样式相同。
18.进一步地,所述关键点包括:
19.开始点、转向点和结束点。
20.根据第三方面,本发明还提供了一种航行体跨区域信息交互能力实时测评方法,所述方法包括:
21.在各区域内的参试航行体上安装数据采集设备,参试航行体在各自的区域内待命,各区域的测试系统实时采集自身区域内的航行体的轨迹信息,并将轨迹信息上传至上位系统,上位系统将各参试航行体航行轨迹进行融合显示;
22.采用基于特征动作的随机指控进行信息响应能力测评:
23.各参试航行体分别在各自任务区域按设定路径巡航,巡航过程中,上位系统选取任意参试航行体发送随机特征动作指令,被选取的参试航行体开始动作后将随机特征动作信息发送给任意其他任务区域的参试航行体;按该步骤遍历所有参试航行体;
24.随机指控信息响应能力正常需满足以下条件:
25.接收到特征动作信息的参试航行体开始执行特征动作后,在设定时间内,下一参试航行体做出与该参试航行体相同的特征动作。
26.进一步地,所述区域包括:水面区域、水下区域、空中区域、陆上区域中至少两个。
27.相比现有技术,本发明的有益效果:
28.(1)本发明提供的方法通过任务动态设定方式,将隐性的航行体“状态、态势、指控”信息交互过程演化映射为显性的实航动态执行,实现对多航行体跨区域实时信息交互协同的真实性、有效性的实时自我验证及第三方测试评估。
29.(2)可对“陆地-空中-水面-水下”全域双向实时信息协同能力验证评估,提升了多域实时信息连通验证评估的真实性、实时性、有效性。
30.(3)测评对象包含跨区域多航行体,其数量不限、类型多种、可自由组合,可按需进行任意两域、三域、四域的对象平台协同能力验证评估,具有较好的灵活性、普适性。
附图说明
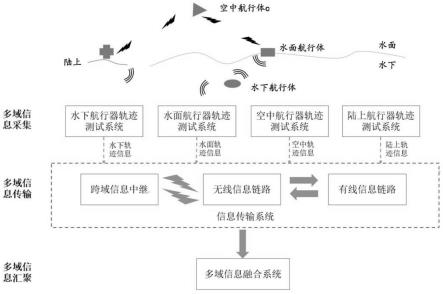
31.图1为实施例1中的跨区域多源信息汇聚流程示意图;
32.图2为实施例2中基于寻点任务的点对点状态信息交互能力测评示意图。
33.图3为实施例2中基于图形绘制的组网态势信息交互能力测评示意图。
34.图4为实施例2中基于特征动作的随机指控信息响应能力测评示意图。
具体实施方式
35.下面通过具体实施方式结合附图对本发明作进一步详细说明。
36.实施例1
37.设参试航行体个数为z,根据参试航行体确定试验域别及各自任务区域,水下、水面、空中、陆上参试航行体集为{z1,zm},分别安装数据采集设备并在各自任务区域待命,水下、水面、空中、陆上测试系统实时采集航行体轨迹信息,并通过跨区域中继、无线及有线链路将轨迹信息传输至多源信息融合系统,该过程如图1所示。下述各项测试中设定反应时长t(t为考虑各航行体信息交互时长)。
38.基于寻点任务的点对点状态信息交互能力测评:
39.分别在各域试验任务区内设置n个任务点,各域别中任务点随机布设并对各任务点进行编号,水下任务点集为{x
下1
,x
下n
},水面任务点集为{x
面1
,x 面n
},空中任务点集为{x
空1
,x
空n
},陆上任务点集为{x
陆1
,x
陆n
};岸基指控站向任意参试航行体zj(j∈[1,m])发送寻任务点xi(i∈[1,n])指令;航行体 zj航行至xi后,将寻任务点xi(i∈[1,n])信息通过点对点的方式发送给其余航行体,各航行体航行至对应任务点;按照该步骤遍历航行体集{z1,zm}。
[0040]
多源信息融合系统将各参试航行体航行轨迹进行融合显示,若寻点任务为寻任务点xi,对如下条件进行判断:
[0041]
①
zj(假设为水面航行体)对x
面i
寻点正确;
[0042]
②
其后t秒内z
j+1
(假设为水下航行体)开始动作,且对x
下
寻点正确;
[0043]
①
、
②
均满足,则认为zj与z
j+1
的“水面
→
水下状态信息交互能力”正常。
[0044]
基于图形绘制的组网态势信息交互能力测评:
[0045]
岸基指控站向任意参试航行体zj(j∈[1,m])发送态势(包括任意图形、数字、字母等)构建指令;航行体zj进行路径规划并将自身位置信息实时广播给其余参试航行体,各参试航行体根据收到的实时位置信息,分析态势,同步开展图形/数字/字母绘制;按照该步骤遍历航行体集{z1,zm}。
[0046]
多源信息融合系统将各参试航行体航行轨迹进行融合显示,对如下条件进行判断:
[0047]
①
zj在收到指令后开始动作;
[0048]
②zj-1
(假设为陆上航行体)、z
j+2
(假设为水面航行体)、z
j+3
(假设为空中航行体)与zj(假设为水面航行体)在“开始、转向、结束”关键点协同动作,且反应时间在t秒内;
[0049]
③
各航行体绘制图形样式(考虑到各航行体速度不同,故大小不限)与zj相同;
[0050]
①
~
③
均满足,则认为zj、z
j-1
、z
j+2
、z
j+3
的“组网态势信息交互能力”正常。
[0051]
基于特征动作的随机指控信息响应能力测评:
[0052]
水下、水面、空中、陆上参试航行体{z1,zm}分别在各自任务区域按设定路径巡航;该过程中岸基指控站向任意参试航行体zj(j∈[1,m])发送随机特征动作(包括任意图形悬停、转圈、返航等)指令;收到随机指控信息的参试航行体立刻执行特征动作;按照该步骤遍历航行体集{z1,zm}。
[0053]
多源信息融合系统将各参试航行体航行轨迹进行融合显示,对如下条件进行判断:
[0054]
①
{z1,zm}分别在各自任务区域按设定路径巡航正常;
[0055]
②zj+1
(假设为水下航行体)收到指令后开始执行特征动作;
[0056]
③zj+1
动作后t秒内zj(假设为水面航行体)做出与z
j+1
相同的特征动作;
[0057]
④
zj动作后t秒内z
j+3
(假设为空中航行体)做出与zj相同的特征动作;
[0058]
⑤zj+3
动作后t秒内z
j-1
(假设为陆上航行体)做出与z
j+3
相同的特征动作;
[0059]
若
①
、
②
均满足,则认为z
j+1
的“水下随机指控信息响应能力”正常;若
①
~
③
则认为z
j+1
、zj的“水下、水面随机指控信息响应能力”正常;若
①
~
④
均满足,则认为z
j+1
、zj、z
j+3
的“水下、水面、空中随机指控信息响应能力”正常;若
①
~
⑤
均满足,则认为z
j+1
、zj、z
j+3
、z
j-1
的“水下、水面、空中、陆上随机指控信息响应能力”正常。
[0060]
实施例2
[0061]
试验准备:
[0062]
对各参试航行体对外接口输出信息、信号特征检查,远程测控、操作界面检查,稳定性检查。确定各航行体与控制中心数据连通接口正确,时空对准无误;确保各域航行体在空中、水面、水下组网通信正常;确保航行体在单域及跨区域通信时通信中继数据连通接口正确,时空对准无误。
[0063]
在本实施例中,参试航行体个数z为3,水下、水面、空中各1个,即{z1, z2,z3}。下述各项试验任务中设定反应时长t为10秒。
[0064]
1、跨区域点对点状态信息交互能力测评:
[0065]
如图2所示,在空中、水面、水下均设置一定范围的任务区,分别在各域任务区内随机设置9个任务点,并对各任务点进行编号。
[0066]
(1)“岸基
→
空中
→
水面
→
水下状态信息交互能力”测评
[0067]
岸基指控站向空中航行体z3发送寻任务点1指令;航行体z3航行至x
空1
后,将寻任务点1信息通过无线链路发送给水面航行体z2;航行体z2航行至x
面1
后,将寻任务点1信息通过跨区域中继发送给水下航行体z1;航行体z1航行至x
下1
。
[0068]
多源信息融合系统将各参试航行体航行轨迹进行融合显示,若岸基指控站任务点1信息发出后10秒内,z3动作并能正确航行至x
空1
,则岸基与z3的“岸基
→
空中状态信息交互能力”正常;若z3航行至x
空1
后10秒内,z2动作并能正确航行至x
面1
,则岸基与z3、z2的“岸基
→
空中
→
水面状态信息交互能力”正常;若z2航行至x
面1
后10秒内,z1动作并能正确航行至x
下1
,则岸基与z3、z2、z1的“岸基
→
空中
→
水面
→
水下状态信息交互能力”正常。
[0069]
(2)“岸基
→
水下
→
水面
→
空中状态信息交互能力”测评
[0070]
岸基指控站向水下航行体z1发送寻任务点5的指令;水下航行体z1航行至 x
下5
后,将寻任务点5信息通过跨区域中继发送给水面航行体z2;航行体z2航行至x
面5
后,将寻任务点5信息通过无线链路发送给空中航行体z3;航行体z3航行至x
空5
。
[0071]
多源信息融合系统将各参试航行体航行轨迹进行融合显示,若岸基指控站任务点5信息发出后10秒内,z1动作并能正确航行至x
下5
,则岸基与z1的“岸基
→
水下状态信息交互能力”正常;若z1航行至x
下5
后10秒内,z2动作并能正确航行至x
面5
,则岸基与z1、z2的“岸基
→
水下
→
水面状态信息交互能力”正常;若z2航行至x
面5
后10秒内,z3动作并能正确航行至x
空5
,则岸基与z1、z2、z3的“岸基
→
水下
→
水面
→
空中状态信息交互能力”正常。
[0072]
(3)“岸基
→
水面
→
空中状态信息交互能力”及“岸基
→
水面
→
水下状态信息交互能力”测评
[0073]
岸基指控站向水面航行体z2发送寻任务点9指令;航行体z2航行至x
面9
后,将寻任务点9信息通过跨区域中继发送给水下航行体z1,通过无线链路发送给空中航行体z3;航行体
z1航行至x
下9
,航行体z3航行至x
空9
。
[0074]
多源信息融合系统将各参试航行体航行轨迹进行融合显示,若岸基指控站任务点9信息发出后10秒内,z2动作并能正确航行至x
面9
,则岸基与z2的“岸基
→
水面状态信息交互能力”正常;若z2航行至x
面9
后10秒内,z1、z3均动作并能分别正确航行至x
下9
、x
空9
,则岸基与z2、z1的“岸基
→
水面
→
水下状态信息交互能力”正常,岸基与z2、z3的“岸基
→
水面
→
空中状态信息交互能力”正常。
[0075]
(1)~(3)所有能力均正常则证明{z1,z2,z3}跨区域状态信息交互能力正常。
[0076]
2、多域组网态势信息交互能力测评:
[0077]
(1)“水面触发的态势信息交互能力”测评
[0078]
如图3所示,岸基指控站向水面航行体z2发送数字1图形构建指令,z2进行路径规划并将自身位置信息实时广播,水下航行体z1和空中航行体z3根据收到的z2实时位置信息,分析z2构建的实时态势,同步开展图形构建。
[0079]
多源信息融合系统将各参试航行体航行轨迹进行融合显示,若水面航行体 z2开始动作后10秒内,水下航行体z1和空中航行体z3均开始动作;水面航行体 z2结束动作后10秒内,水下航行体z1和空中航行体z3均停止动作;且根据z2、 z1、z3的融合轨迹显示绘制数字1图形样式相同,则z1、z2、z3的“水面触发的态势信息交互能力”正常。
[0080]
(2)“空中触发的态势信息交互能力”测评
[0081]
岸基指控站向空中航行体z3发送数字5图形构建指令,z3进行路径规划并将自身位置信息实时广播,水下航行体z1和水面航行体z2根据收到的z2实时位置信息,分析z3构建的实时态势,同步开展图形构建。
[0082]
多源信息融合系统将各参试航行体航行轨迹进行融合显示,若空中航行体 z3开始动作后10秒内,水面航行体z2和水下航行体z1均开始动作;空中航行体 z3结束动作后10秒内,水面航行体z2和水下航行体z1均停止动作;开始至停止过程中涉及的4个转向点,水面航行体z2和水下航行体z1均依据在空中航行体 z3结束动作后10秒内做出正确转向动作;最终根据z2、z1、z3的融合轨迹显示绘制数字5图形样式相同,则z1、z2、z3的“空中触发的态势信息交互能力”正常。
[0083]
(3)“水下触发的态势信息交互能力”测评
[0084]
岸基指控站向水下航行体z1发送数字5图形构建指令,z1进行路径规划并将自身位置信息实时广播,水面航行体z2和空中航行体z3根据收到的z1实时位置信息,分析z1构建的实时态势,同步开展图形构建。
[0085]
多源信息融合系统将各参试航行体航行轨迹进行融合显示,若水下航行体 z1开始动作后10秒内,水面航行体z2和空中航行体z3均开始动作;空中航行体 z3结束动作后10秒内,水面航行体z2和空中航行体z3均停止动作;开始至停止过程中涉及的4个转向点,水面航行体z2和空中航行体z3均依据在水下航行体 z1结束动作后10秒内做出正确转向动作;最终根据z2、z1、z3的融合轨迹显示绘制数字5图形样式相同,则z1、z2、z3的“水下触发的态势信息交互能力”正常。
[0086]
(1)~(3)所有能力均正常则证明{z1,z2,z3}多域组网态势信息交互能力正常。
[0087]
3、基于特征动作的随机指控信息响应能力测评
[0088]
如图4所示,试验开始后,空中航行体z3在空中任务区内按设定“梳字形”路径巡
航,水面航行体z2在水面任务区内按设定“矩形”路径巡航,水下航行体 z1在水下任务区内按设定“三角形”路径巡航。
[0089]
(1)“空中触发的随机指控信息响应能力”测评
[0090]
岸基指控站向空中航行体z3发送特征动作1指令;航行体z3在空中悬停,将并将特征动作1指令通过无线链路发送给水面航行体z2;航行体z2在水面悬停后,将特征动作1信息通过跨区域中继发送给水下航行体z1;航行体z1在水下悬停。
[0091]
多源信息融合系统将各参试航行体航行轨迹进行融合显示,若岸基指控站特征动作1指令发出后10秒内,z3悬停;z3悬停后10秒内,z2悬停;z2悬停后 10秒内z1悬停,则z1、z2、z3的“空中触发的随机指控信息响应能力”正常。
[0092]
(2)“水面触发的随机指控信息响应能力”测评
[0093]
岸基指控站向水面航行体z2发送特征动作5指令,z2在水面转圈,并将特征动作1指令,分别通过跨区域中继发送给水下航行体z1,通过无线链路发送给空中航行体z3;水下航行体z1和空中航行体z3根据收到的z2指令,分别在水下、空中转圈。
[0094]
多源信息融合系统将各参试航行体航行轨迹进行融合显示,z1、z2、z3正常按设定路径巡航;岸基指控站特征动作5指令发出后10秒内,水面航行体z2在水面转圈;z2悬停后10秒内,水下航行体z1和空中航行体z3分别在水下、空中转圈;则z1、z2、z
3“水面触发的随机指控信息响应能力”正常。
[0095]
(3)“水下触发的随机指控信息响应能力”测评
[0096]
岸基指控站向水下航行体z1发送特征动作9指令;航行体z3返航,将并将特征动作9指令通过无线链路发送给水面航行体z2;航行体z2返航,将特征动作9信息通过跨区域中继发送给空中航行体z3;航行体z1返航。
[0097]
多源信息融合系统将各参试航行体航行轨迹进行融合显示,若岸基指控站特征动作9指令发出后10秒内,z3返航;z3返航后10秒内,z2返航;z2返航后 10秒内z1返航,则z1、z2、z3的“水下触发的随机指控信息响应能力”正常。
[0098]
(1)~(3)所有能力均正常则证明{z1,z2,z3}随机指控信息响应能力正常。
[0099]
以上应用了具体个例对本发明进行阐述,只是用于帮助理解本发明,并不用以限制本发明。对于本发明所属技术领域的技术人员,依据本发明的思想,还可以做出若干简单推演、变形或替换。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1