基于多传感器数据融合的货运车辆车况及行车异常辨识方法
本发明属于货运车辆在公路及桥梁上超载运营的不停车动态检测,具体涉及一种基于多传感器数据融合的货运车辆车况及行车异常辨识方法。
背景技术:
1、超载超限运输已经成为制约交通运输发展的瓶颈,其危害主要在于严重破坏了公路和桥梁设施、导致道路交通事故多发。目前,大型货运车辆在路面上的管理要采用静态地磅法和动态称重法两种。地磅法需要工作人员进行路面巡逻,将疑似超重车辆引导进入专门的超限运输检测站进行称重,该方法测量精度较高,但是检测效率低、工作强度大、覆盖面小,难以从根本上治理超限超载。动态称重法则是将多组传感器(以电阻应变式窄条传感器居多)安装于路面上,根据运行中车辆轮胎对地面传感器的压力来计算通过车辆的重量、轴数、速度等信息,可实现非现场的高效称重。在超限超载的深层次原因尚未完全消除的情况下,运输车辆超载现象难以消除,部分驾驶员故意异常行车造成称重系统识别出错必将时有发生。
2、同时现阶段部分货运车辆驾驶员通过超低速车辆接龙方式通过路面动态称重系统,会造成系统误判,车辆称重结果异常;部分货运车辆由于胎压的差异造成动态称重结果不准确等问题。
技术实现思路
1、为解决现在技术存在的上述问题,本发明提供了一种将多传感器数据进行融合减少了车辆误判,提高检测系统对车辆异常车况及行车辨识能力,堵住现有系统漏洞,打击违法货运的基于多传感器数据融合的货运车辆车况及行车异常辨识方法。
2、本发明采用的技术方案是:
3、基于多传感器数据融合的货运车辆车况及行车异常辨识方法,其具体步骤如下:
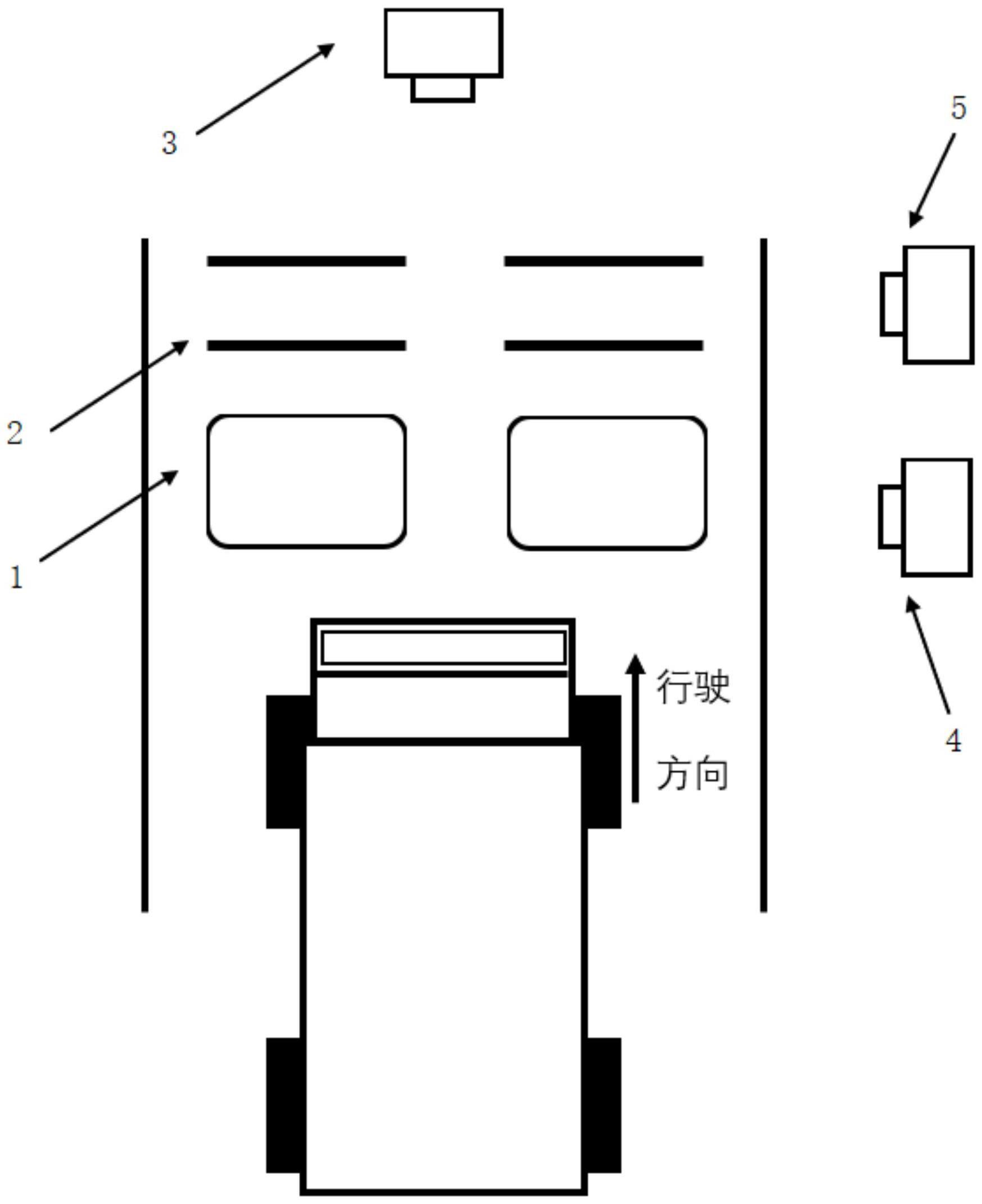
4、s1,在货运车辆行驶方向的公路或桥梁上依次设置有用于启动称重数据采集及监控数据保存的地感线圈、用于货运车辆动态称重的称重传感器,道路在称重传感器前侧上方设置有监控摄像头a,道路上在地感线圈的一侧设置有对车辆完整拍摄的监控摄像头b,道路上在称重传感器的一侧设置有对称重的车辆轮胎全覆盖的监控摄像头c;
5、s2,当车辆驶过地感线圈时,地感线圈产生一触发信号,启动监控摄像头a、监控摄像头b、监控摄像头c、称重传感器,开始识别、称重工作;
6、s3,根据监控摄像头a采集的图像获取车辆牌照信息;
7、s4,根据监控摄像头b采集的图像计算获得车速,当车速过低时,且跟车识别出该车辆长度明显与常规车型长度不符,且近似与常规车型长度数倍时,则判定该车辆疑似接龙通过称重位置,即判定该车行车异常并将该车信息进行保存;
8、s5,称重传感器根据车速动态变换了采样率进行车辆称重获得车辆重量数据;同时根据监控摄像头c采集的车辆通过称重传感器时车轮轮胎瞬时图像获得轮胎变形量,结合车辆速度,获得车辆重量数据。
9、进一步,步骤s3中的车辆牌照信息获取步骤如下:
10、s31,监控摄像头a采集多幅背景照片取平均图像,进行背景标定形成背景图像;
11、s32,根据地感线圈的触发信号开始持续采集视野内的图像,该图像减去背景图像获得进入的车辆感兴趣区域图像,在该区域内提取车牌颜色区域,标记为车牌位置,对车牌位置进行ocr文字识别,提取车牌信息。
12、进一步,监控摄像头a采集到的图像需要进行畸变校正。
13、进一步,步骤s3中还包括:
14、s33,采集不同时刻的目标车辆图像,计算车牌在校正后图像的位置,计算两幅不同时刻中校正图像中车牌的距离,将该距离除以时间差,即可获得目标车辆速度;
15、s34,根据校正后时间序列车辆图像,判断车牌是否越过中线来分辨该车辆在动态称重过程是否进行跨道行驶。
16、进一步,步骤s4的获得车速具体步骤如下:
17、s41,监控摄像头b采集多幅背景照片取平均图像,进行背景标定形成背景图像;
18、s42,根据车道长度对监控摄像头b采集的图像进行像素标定,获得摄像头b采集图像像素对应的实际长度;
19、s43,当目标车辆进入视野范围内,对车辆进行图像采集,用该图像减去背景图像获得进入的车辆感兴趣区域图像,提取车辆一侧的外观信息,根据车辆的长宽、颜色等信息与监控摄像头a获得的车牌信息进行匹配,建立该车的数据库;
20、s44,根据目标车辆占据监控摄像头b图像的长及宽度,与像素实际尺寸进行相乘,获得目标车辆的实际长、宽;
21、s45,通过比较前后帧图像中目标车辆的中心位置即可获得车辆行驶轨迹;计算前后帧图像目标车辆中心位置的距离,再除以前后帧图像拍摄时间间隔,获得该车当前位置的车速。
22、进一步,步骤s4中当车速过低或过高时,监控摄像头b抓取多张正面俯视图像和侧面图像。
23、进一步,步骤s5中称重传感器的采样率变换的步骤如下:
24、根据监控摄像头a或监控摄像头b获得目标车辆的平均车速,设为v,称重系统可动态称重的最高车辆速度为v’,称重传感器采样率为fs,对于车速v下单轮压过传感器形成压力信号为stress[i]的一维数组,设n=v’/v,将stress[i]数组进行精简,每n个数据取平均值,作为新的压力信号,即根据车辆的车速动态变换了采样率。
25、进一步,步骤s5中跟车称重时的车辆重量数据获取具体步骤如下:
26、s51,利用监控摄像头b对跟车的数量及每辆车的长度进行识别及计算,设定前后车距的最小阈值,一旦前后车距离小于该阈值,启动跟车识别方法;
27、s52,随着车辆速度的降低以及车距的缩小,车辆识别算法可能会将两辆车识别为一辆超长车,根据前帧图像的识别结果,将该超长车标记为两辆车跟车,以此类推;
28、s53,当跟车通过动态称重传感器时,根据每辆车长在跟车车队总长中的占比及顺序,对动态称重传感器的信号按照时间轴进行等比例分割,根据压力峰值数量即可获得目标车辆的轴数,将每个轴的压力信号进行累加,获得该目标车辆的整车重量数据。
29、进一步,步骤s5中获取轮胎变形量的具体步骤如下:
30、1)监控摄像头c采集多幅背景照片取平均图像,进行背景标定形成背景图像;
31、2)当车辆驶过称重传感器位置时,采集图像,利用该图像减去背景图像,形成初步的轮胎提取,对轮胎进行二值化处理,进行边界提取,形成初步的轮胎轮廓;
32、3)对轮胎轮廓图像中斜下两侧区域进行边缘提取,采用最小二乘法进行圆拟合;
33、4)从图像中量取轮胎与路面接触高度,通过拟合圆获得圆心和半径,计算圆心与接触高度的距离,将该距离除以半径获得轮胎变形量。
34、进一步,步骤s5中还包括胎压变形量、结合速度的称重传感器动态标定,具体如下:根据称重传感器的称重量程分段选取不同重量,不少于4组,设定低、中、高,三种胎压,采用过称的砝码车在不同重量、不同胎压下通过动态称重系统,建立多维标定曲线。
35、本发明的有益效果:将多传感器数据进行融合减少了车辆误判,提高检测系统对车辆异常车况及行车辨识能力,堵住现有系统漏洞,打击违法货运;保证称重数据的完整性以及填补了由于超慢车速造成的称重数据异常,提高动态称重结果的准确性。
- 还没有人留言评论。精彩留言会获得点赞!