车辆行驶的控制方法及装置与流程
本公开涉及智慧交通,尤其涉及一种车辆行驶的控制方法及装置。
背景技术:
1、随着生活节奏不断加快以及工业生产水平的提高,汽车在当今社会的普及率越来越高。从而交通管理智能化为不断提高城市交通管理的重要方法。同时,智能化交通管理中,在不断提高城市交通道路的同时,对于行人和车辆的安全起到重要贡献。
2、本公开提供一种车辆行驶的控制方案,以提升交通管理的智能化程度并有利于提升行人和车辆的安全性。
3、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本公开的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本公开的目的在于提供一种车辆行驶的控制方法、车辆行驶的控制装置、计算机可读存储介质及电子设备,能够在一定程度上提升交通管理的智能化程度并有利于提升交通安全,同时不增加车辆实现行驶路径决策带来的自身处理流程的复杂度。
2、本公开的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本公开的实践而习得。
3、根据本公开的一个方面,提供一种车辆行驶的控制方法,该方法包括:确定目标道路对应的结构化信息,上述结构化信息包括:目标车辆在上述目标道路中的位置信息,上述目标车辆的行驶方向上以及距离在上述目标车辆第二预设阈值的范围内的障碍物信息;在上述目标车辆驶向上述目标道路的路口且与上述路口之间的距离大于第一预设阈值的情况下,根据上述目标车辆行驶方向上的第二预设阈值的范围内的障碍物信息确定第一控制区域,上述第一预设阈值大于上述第二预设阈值;以及,控制上述第一控制区域内的交通标识的显示颜色,以使上述目标车辆基于上述交通标识的显示颜色行驶,上述第一控制区域内的交通标识包括车道线和方向线。
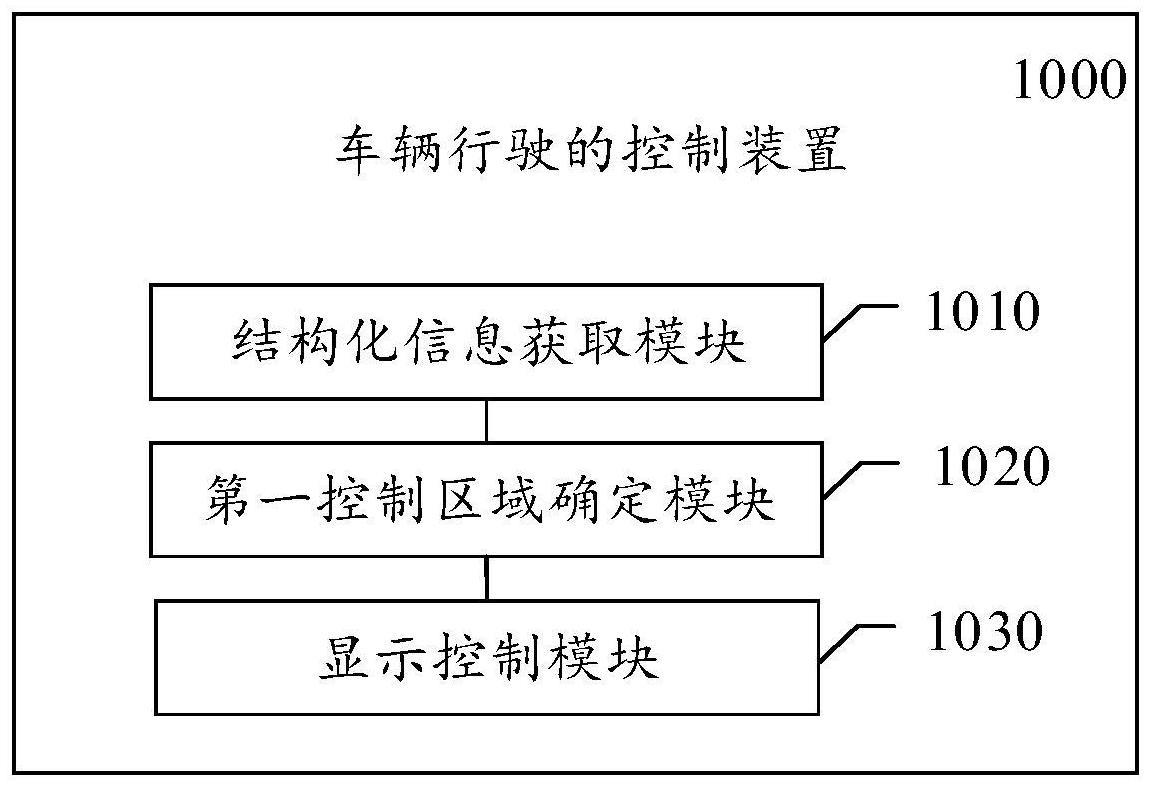
4、根据本公开的另一个方面,提供一种车辆行驶的控制装置,该装置包括:结构化信息获取模块、第一控制区域确定模块,以及显示控制模块。
5、其中,上述结构化信息获取模块,用于:确定目标道路对应的结构化信息,结构化信息包括:目标车辆在上述目标道路中的位置信息,上述目标车辆的行驶方向上以及距离在上述目标车辆第二预设阈值的范围内的障碍物信息;上述第一控制区域确定模块,用于:在上述目标车辆驶向上述目标道路的路口且与上述路口之间的距离大于第一预设阈值的情况下,根据上述目标车辆行驶方向上的第二预设阈值的范围内的障碍物信息确定第一控制区域,上述第一预设阈值大于上述第二预设阈值;以及,上述显示控制模块,用于:控制上述第一控制区域内的交通标识的显示颜色,以使上述目标车辆基于上述交通标识的显示颜色行驶,上述第一控制区域内的交通标识包括车道线和方向线。
6、根据本公开的再一个方面,提供一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述实施例中的车辆行驶的控制方法。
7、根据本公开的又一个方面,提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述实施例中的车辆行驶的控制方法。
8、本公开的实施例所提供的车辆行驶的控制方法、车辆行驶的控制装置、计算机可读存储介质及电子设备,具备以下技术效果:
9、通过本说明书实施例提供的车辆行驶的控制方案中,通过路侧测量设备确定目标道路对应的结构化信息,并根据获取到的结构化信息确定在目标车辆与路口之间的距离大于第一预设阈值的情况下,根据目标车辆行驶方向上的第二预设阈值的范围内的障碍物信息确定第一控制区域,以及控制第一控制区域内的交通标识(车道线和方向线)的显示颜色,以使目标车辆基于所述交通标识的显示颜色行驶。本方案能够提升交通管理的智能化程度并有利于提升交通安全,同时不增加车辆自身处理流程的复杂度。
10、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
11、示例1.一种车辆行驶的控制方法,应用于路侧测量设备,所述方法包括:确定目标道路对应的结构化信息,所述结构化信息包括:目标车辆在所述目标道路中的位置信息,所述目标车辆的行驶方向上以及距离在所述目标车辆第二预设阈值的范围内的障碍物信息;在所述目标车辆驶向所述目标道路的路口且与所述路口之间的距离大于第一预设阈值的情况下,根据所述目标车辆行驶方向上的第二预设阈值的范围内的障碍物信息确定第一控制区域,所述第一预设阈值大于所述第二预设阈值;控制所述第一控制区域内的交通标识的显示颜色,以使所述目标车辆基于所述交通标识的显示颜色行驶,所述第一控制区域内的交通标识包括车道线和方向线。
12、示例2.根据示例1所述的方法,所述根据所述目标车辆行驶方向上的第二预设阈值的范围内的障碍物信息确定第一控制区域,包括:在所述目标车辆行驶方向上的第二预设阈值的范围内存在障碍物的情况下,将所述目标车辆与所述障碍物之间的区域确定为第一控制区域;控制所述第一控制区域内的交通标识的显示颜色,包括:控制所述第一控制区域内的交通标识的显示颜色由第二级别预警色过渡为第一级别预警色,所述第一级别预警色的颜色明度大于所述第二级的颜色明度。
13、示例3.根据示例1所述的方法,所述根据所述目标车辆行驶方向上的第二预设阈值的范围内的障碍物信息确定第一控制区域,包括:在所述目标车辆行驶方向上的第二预设阈值的区域内不存在障碍物的情况下,将所述目标车辆行驶方向上的第二预设阈值的区域确定为第一控制区域;控制所述第一控制区域内的交通标识的显示颜色,包括:控制所述第一控制区域内的交通标识的显示颜色为安全行驶色。
14、示例4.根据示例1所述的方法,所述结构化信息还包括:所述目标车辆与所述目标道路的路口之间区域的障碍物信息;所述方法还包括:在所述目标车辆驶向所述目标道路的路口且与所述路口之间的距离不大于所述第一预设阈值的情况下,根据所述目标车辆与所述路口之间区域的障碍物信息确定第二控制区域;控制所述第二控制区域内的交通标识的显示颜色,以使所述目标车辆基于所述交通标识的显示颜色行驶,所述第二控制区域内的交通标识包括:停车线、斑马线、车道线和方向线。
15、示例5.根据示例4所述的方法,所述根据所述目标车辆与所述路口之间区域的障碍物信息确定第二控制区域,包括:在所述目标车辆与所述路口之间区域内不存在障碍物的情况下,将所述目标车辆与所述路口之间区域确定为第二控制区域;控制所述第二控制区域内的交通标识的显示颜色,包括:控制所述第二控制区域内的车道线和方向线的显示颜色由第二级别预警色过渡为第一级别预警色,以及控制所述第二控制区域内的停车线和斑马线的显示颜色为第一级别预警色。
16、示例6.根据示例4所述的方法,所述根据所述目标车辆与所述路口之间区域的障碍物信息确定第二控制区域,包括:在所述目标车辆与所述路口之间区域内存在障碍物的情况下,将所述目标车辆与所述障碍物之间区域确定为第二控制区域中的第一子区域,以及将所述障碍物与所述路口之间区域确定为第二控制区域中的第二子区域;控制所述第二控制区域内的交通标识的显示颜色,包括:控制所述第一子区域内的车道线和方向线的显示颜色由第二级别预警色过渡为第一级别预警色,控制所述第二子区域内的车道线和方向线的显示颜色由第二级别预警色过渡为第一级别预警色,以及控制所述第二子区域内的停车线和斑马线的显示颜色为第一级别预警色。
17、示例7.根据示例1所述的方法,所述结构化信息还包括:所述目标车辆行驶在所述目标道路时对应的天气信息;所述方法还包括:将距离所述目标车辆第三预设阈值的区域确定为第三控制区域;根据所述天气信息控制所述第三控制区域内交通标识的显示亮度。
18、示例8.根据示例1至7中任意一项所述的方法,在所述确定目标道路对应的结构化信息之后,所述方法还包括:通过所述路侧测量设备将结构化信息处理得到关于所述目标车辆的路径规划决策信息,并将所述路径规划决策信息发送至所述目标车辆,以使目标车辆根据路径规划决策信息行程。
19、示例9.根据示例1至7中任意一项所述的方法,所述目标道路的两侧均分布有路侧测量设备;所述确定目标道路对应的结构化信息,包括:所述路侧测量设备通过边缘计算的方式获取所述目标道路对应的所述结构化信息。
20、示例10.一种车辆行驶的控制装置,所述装置包括:结构化信息获取模块,用于:确定目标道路对应的结构化信息,所述结构化信息包括:结构化信息包括:目标车辆在所述目标道路中的位置信息,所述目标车辆的行驶方向上以及距离在所述目标车辆第二预设阈值的范围内的障碍物信息;第一控制区域确定模块,用于:在所述目标车辆驶向所述目标道路的路口且与所述路口之间的距离大于第一预设阈值的情况下,根据所述目标车辆行驶方向上的第二预设阈值的范围内的障碍物信息确定第一控制区域,所述第一预设阈值大于所述第二预设阈值;显示控制模块,用于:控制所述第一控制区域内的交通标识的显示颜色,以使所述目标车辆基于所述交通标识的显示颜色行驶,所述第一控制区域内的交通标识包括车道线和方向线。
21、示例11.一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如示例1至9中任意一项所述的车辆行驶的控制方法。
22、示例12.一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如示例1至9中任意一项所述的车辆行驶的控制方法。
- 还没有人留言评论。精彩留言会获得点赞!