分布式命名导航行人行车预警方法、系统和装置
本发明涉及智能安全导航,特别涉及一种分布式命名导航行人行车预警方法、系统和装置。
背景技术:
1、目前,在自动驾驶、智能交通、军事演练、智能作业、工业生产、地形勘探、天文观测、应急救援等方面分布式命名导航行人行车预警技术应用广泛。
2、但是,现有技术中,多集中在gps、北斗、图像分割技术等方面,在动态、复杂、不确定环境下,智能安全导航与预警技术文献较少,还很欠缺。
3、采用现有技术,并不能对行人行车进行精准预警以及实时预警。
技术实现思路
1、本发明针对现有技术的缺陷,提供了一种分布式命名导航行人行车预警方法、系统和装置。
2、本发明中分布式命名导航是利用摄像机、传感器、雷达、服务器等设备通过智能关联协同计算将时空地理位置及环境与语义信息相结合的对人、机、物的移动或飞行均可导航的智能导航模式,其中使用了多个服务节点来处理导航请求和提供导航结果。这可以提高导航的准确性和效率,有效降低系统和或网络能耗,同时也可以确保服务的可靠性和可扩展性。
3、本发明中行人行车预警与分布式命名导航相联合形成分布式命名导航行人行车预警系统,在城市交通环境中,能够实时监测周围行人和车辆的运动轨迹及其相关联状况,并及时发出预警信号,也可应用在人、机、物移动或飞行的其他场景中。
4、为了实现以上发明目的,本发明采取的技术方案如下:
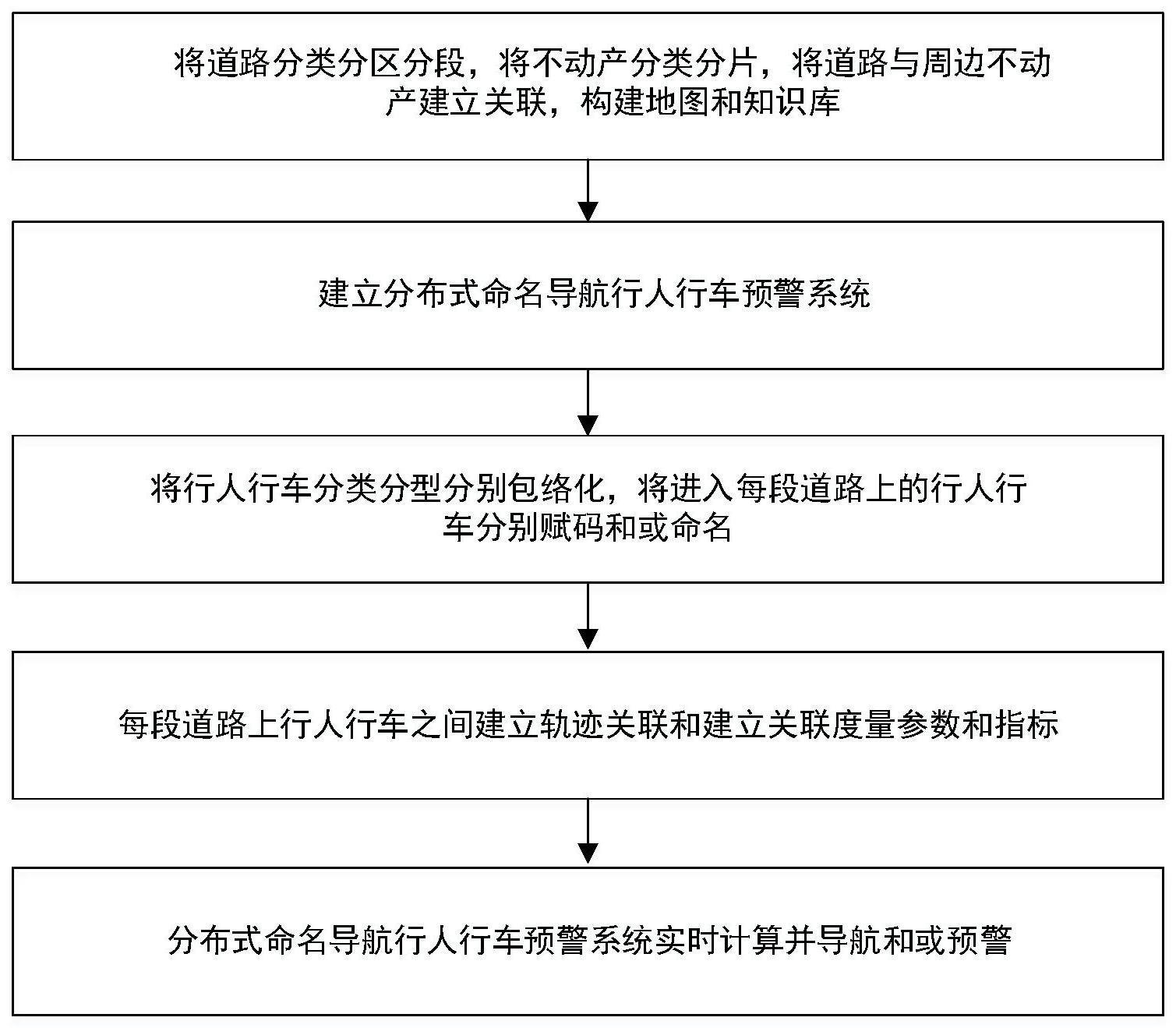
5、一种分布式命名导航行人行车预警方法,包括以下步骤:
6、s1、将道路分类分区分段,将不动产分类分片,将道路与周边不动产建立关联,构建地图和知识库;
7、s2、建立分布式命名导航行人行车预警系统;
8、s3、将行人行车分类分型分别包络化,将进入每段道路上的行人行车分别赋码和或命名;
9、s4、每段道路上行人行车之间建立轨迹关联和建立关联度量参数和指标;
10、s5、分布式命名导航行人行车预警系统实时计算并导航和或预警。
11、进一步地,s1中将不动产分类分片,将道路与周边不动产建立关联,构建地图和知识库包括:
12、s11、将道路的分类分区分段、将不动产分类分片进行编码和或命名,并用图像、视频流、文本描述进行数字化;
13、s12、将各段道路与其周边不动产建立关联和建立关联度量参数和指标;
14、所述建立关联是利用地理几何图形或文字语言描述建立关联;
15、所述关联度量参数和指标,包括路程和或距离、方位、行人行车时空流量、行人行车出行频次、行人行车及行人行车集群的各种时空属性特征;
16、s13、将各段道路与与其接续的各段道路建立关联和建立关联度量参数和指标;
17、所述建立关联是利用地理几何图形或文字语言描述建立关联;
18、所述关联度量参数和指标包括:接续方向、路程和或距离、行人行车时空流量、行人行车转移概率、行人行车出行频次、行人行车及行人行车集群的各种时空属性特征;
19、s14、根据各段道路和不动产的关联关系和其时空变化更新状况以及交通工具预测计算构建地图并更新地图;
20、构建地图和知识库还包括各段道路与其接续道路以及周边不动产和环境中存在的所有人、机、物互为参照物,根据相互关联和或参照多方协同构建地图和路径规划;
21、s15、将道路和不动产的编码和或命名和特征信息进行加密处理和解密处理;
22、s16、将道路和不动产及其时空变化状况进行可视化或仿真化,建立道路和不动产知识数据库或云。
23、进一步地,s2中建立分布式命名导航行人行车预警系统包括:
24、利用服务器、基站、网关、路由器、交换机、传感器、摄像机、雷达建立分布式命名导航行人行车预警系统;
25、根据道路的分类分段,将分布式命名导航行人行车预警系统区块链化;
26、根据道路的分类分段,分布式命名导航行人行车预警网络系统采用网关集群架构建立协同,还可采用命名与地址相结合的命名数据网络安全体系架构。
27、进一步地,s2中所述分布式命名导航行人行车预警系统包括:
28、输入模块、输出模块、安全计算处理模块、导航预警控制模块、导航预警事件管理模块、存储模块、地图模块、环境气象模块、道路环境模块、行人模块、行车模块、轨迹模块、关联模块、可视化模块、硬件管理模块、软件管理模块、语言图像知识库模块、导航语言翻译navit模块、网络连接控制模块、道路和不动产关联知识数据库或云模块、web交互操作系统模块;
29、上述模块之间互联互通,模块能够分成多个不同处理单元,通过物理隔离和或虚拟隔离,模块和单元能够分布在网络不同服务器或云中,模块和单元能够集成在同一设备中,各模块和单元根据效率和数据状况分别设置缓存区,输入模块、输入单元、输出模块、输出单元能够嵌入集成到其他模块中,也可与其他模块互联互通。
30、所述的分布式命名导航行人行车预警系统的各模块功能如下:
31、输入模块:负责采集各类导航预警所用信息,包括各类传感器、雷达、摄像机、网络接口和智能设备;
32、输出模块:负责将处理之后的各类导航预警信息传输给相应用户、终端、设备、接口;
33、安全计算处理模块:负责根据各种智能学习和或智能计算处理技术进行轨迹对比计算,道路环境避障避险计算,气象预测计算,路径规划计算,事件时空变化规律逻辑计算,关联学习计算,视频流压缩编码计算,网络传输处理,各类互联互通安全协议设计,各类信息和数据安全处理和加解密计算;
34、导航预警控制模块:负责各模块之间的相互通信,并根据交互信息、规则规范标准、计算结果形成导航信息指令和预警信息指令,并评估分类分级,向行人和或行车发布导航指令和或预警指令;
35、导航预警事件管理模块:负责将具体导航事件和预警事件评估分类分级,建立事件数据逻辑模型等关联流动空间,形成事件映射数据库并计算统计等,以备各种学习计算;
36、存储模块:负责存储各模块数据、规则、算法、模型、策略,分级分块分对象存储,并根据使用情况和重要程度设定有效期限及时刷新清除无效数据;
37、地图模块:负责计算生成和更新地图、路线、路标信息,负责计算推理生成每行人每行车的实时动态路径规划信息、导航路线调度信息,包括各量级的电子地图、虚拟现实地图和混合现实地图以及关联匹配映射数据信息;
38、环境气象模块:负责采集检测识别分类规范化表示处理环境气象实时信息数据,预测计算环境气象信息;
39、道路环境模块:负责采集检测识别分类规范化表示处理道路环境实时信息数据,道路分类分段分区,预测规划计算移动路线;
40、行人模块:负责行人识别分类标注,行人赋码和消码,命名和消除命名,行人统计计算,行人时空流量变化规律计算以及注册,身份认证,用户与系统的交互,其中所述行人识别分类标注包括根据行人赋码、命名、服装、面貌、年龄、外型、动作的特征属性的识别分类标注,还包括根据行人集群结构、密度、人数、行为、服装、年龄以及集群组队活动类型的人群特征属性的识别分类标注,还包括根据人、机、物交互关系特征属性的行人识别分类标注;
41、行车模块:负责行车识别分类标注,行车赋码和消码,命名和消除命名,行车统计计算,行车时空流量变化规律计算以及注册,车辆认证,用户与系统的交互,其中所述行车识别分类标注包括根据行车赋码、命名、颜色、品牌、车牌号、外型、移动或飞行速度的特征属性的识别分类标注,还包括根据行车集群结构、密度、车数、移动或飞行速度以及集群组队活动类型的车队特征属性的识别分类标注,还包括根据人、机、物交互关系特征属性的识别分类标注,所述车辆认证包括车辆身份认证、车辆所有者认证和车辆所用者认证以及各种认证数据信息与车辆的关联;
42、轨迹模块:负责采集行人行车实时移动轨迹,形成行人行车轨迹图;
43、关联模块:负责将道路、气象、环境、地图、行人、行车、轨迹建立关联,根据关联度量参数和指标以及交通规则、导航规则、预警规则进行关联计算,实时获得各种关联数据结果,同时建立数据深度感知认知关联流动流程和知识图谱,存储和更新关联数据、关联逻辑、关联模型信息;
44、可视化模块:负责将地图,路况,气象,轨迹,行人,行车,关联状况进行可视化并显示在各种屏幕上或现实空气中,虚实协同匹配映射;
45、硬件管理模块:负责导航预警系统各硬件的调整、检查、维修和智能计算安全预警;
46、软件管理模块:负责导航预警系统各软件的调整、检查、维修和智能计算安全预警;
47、语言图像知识库模块:负责分类分度存储导航和预警信息数据及其关联信息数据的各类语言、语音、文本、图像、符号、曲线、结构、逻辑知识,且语言、语音、文本、图像、符号、曲线、结构、逻辑之间相互匹配关联映射;
48、导航语言翻译navit模块:根据语言图像知识库,联合transformer模型和或cnn模型和或穿越学习和或强化学习和或统计学习和或对比学习的智能技术方法,负责多模态导航信息数据的语言相互翻译和相互转化,负责生成导航指令、预警指令、地图信息、路径规划信息、标注信息和参数信息;
49、网络连接控制模块:负责各模块和各单元的网络连接,接口管理,网络检测,网络状况计算,连接协议设计,网络信息加解密计算,安全预警;
50、道路和不动产关联知识数据库或云模块:负责将道路和不动产及其时空变化状况进行数字化和可视化或仿真化,并表示计算生成道路和不动产的关联关系、关联度量参数和指标,形成各段道路和其接续各段道路和周边不动产的时空关联逻辑范式和模型,并计算构建并更新各种量级的地图;
51、web交互操作系统模块:主要负责行人行车与所述系统各模块之间的安全信息交互,如发布导航或预警需求等,和负责行人行车之间的安全信息交互,和负责各道路路段上行人行车之间的安全信息交互,也包括负责人、机、物各类用户之间的交互以及各类用户与分布式命名导航行人行车预警系统的交互。
52、进一步地,s2中所述的分布式命名导航行人行车预警系统各模块内部根据关联历史数据信息形成各模块的时空神经网络学习机制小模型,各模块相互连接组网,形成时空导航navigpt或导航智能体和各类导航预警api;
53、根据各模块相应神经网络模型设计开发相应可编程和或可软件定义的芯片和或处理器。
54、进一步地,所述s3的子步骤包括:
55、行人行车由相应路段的摄像传感设备实时采集并传输到分布式命名导航行人行车预警系统的各需求模块,和或行人行车各自带摄像传感手机平板设备实时采集并传输到分布式命名导航行人行车预警系统的各需求模块,和或某种第三方观察或观测设备实时采集并传输到分布式命名导航行人行车预警系统的各需求模块,和或行人行车各自在分布式命名导航行人行车预警系统的显示页面如网页或app上统一注册;
56、行人行车包络化是根据行人行车各自形状、体积特征,采用几何形体图像将行人行车分别包络,包络的几何图形图像外观形状上、体积大小上一般不小于行人行车各自的整体实际形状和体积大小;
57、根据道路分段状况,道路分段包括可用特殊分割线分开或特殊路标分开或分布式命名导航行人行车预警系统中道路环境模块中道路分段机制的依据分开;
58、将进入每段道路上的行人行车立即分别分类赋码和或命名,在该段道路上统一使用该段道路上的赋码和或命名,行人行车移动出该段道路时,赋码和或命名自动失效和清除;进入另一段道路时,又被重新赋码和或命名,移动出该段道路时,赋码和或命名又自动失效和清除;
59、作为优选,s3中每行人每行车在多段连续道路上使用一个命名和或一个或多个赋码,或使用多个命名和或多个赋码;
60、作为优选,s3中赋码和或命名在行人行车进入某段道路之前的一段时间内预赋码,也就是允许该段道路上的赋码和或命名与接续道路上的赋码和或命名一段时间的同时存在,赋码和或命名包括按照有序编码规则赋码和或命名,按照无序编码规则赋码和或命名,和按照加密解密编码的规则赋码和或命名;
61、作为优选,s3中每段道路使用同样的赋码和或命名机制,或采用不同的赋码和或命名机制,同一段道路上根据入口不同,移动方向不同采用设置多套赋码和或命名机制;
62、作为优选,s3中赋码和或命名是分布式命名导航行人行车预警系统根据采集到的行人行车实时信息实时自动完成的,行人行车自身无法修改或调整赋码和或命名;
63、作为优选,s3中分布式命名导航行人行车预警系统将行人行车每段道路上的赋码和或命名与行人行车的注册信息和或历史关联信息相互关联和匹配映射;
64、作为优选,s3中分布式命名导航行人行车预警系统通过行人行车特征检测识别行人行车,通过道路各路段之间的行人行车信息互联互通和共享识别行人行车,建立每行人每行车与各路段与所述赋码和或命名的关联和匹配映射;
65、作为优选,s3中各段道路上的每次赋码和或命名包括道路空间中的部分或全部人、机、物;
66、各段道路及其空间中的对人、机、物的赋码和或命名以一段时间为周期进行周期性地重新循环赋码和或命名,或周期性地采用不同规则不同机制的赋码和或命名方式对相应道路空间中的人、机、物进行重新赋码和或命名;
67、各段道路及其空间中赋码和或命名的时间周期长度根据道路环境状况、道路流量状况因素及时调整更新;
68、通过长时间学习计算道路环境状况、道路流量状况、道路不确定因素发生情况,形成各段道路环境状况时空变化规律逻辑范式和模型,形成各段道路流量状况时空变化规律逻辑范式和模型,形成各段道路不确定因素发生情况时空变化规律逻辑范式和模型,形成各段道路空间中对人、机、物赋码和或命名的时空变化规律逻辑范式和模型,形成各段道路空间的交通、导航和预警的管理规则、规范和标准的更新范式和模型;
69、根据各段道路空间中对人、机、物赋码和或命名的时空变化规律逻辑范式和模型进行各段道路空间中人、机、物的赋码和或命名;
70、联合各段道路空间中对人、机、物赋码和或命名的时空变化规律逻辑范式和所述人、机、物的其他特征属性对所述人、机、物进行时空追踪识别和身份认证,联合各段道路空间中对人、机、物赋码和或命名的时空变化规律逻辑范式和所述人、机、物的其他特征属性对所述人、机、物集群的复杂场景进行所述人、机、物的追踪识别分类流量统计以及每行人每行车每物体的时空追踪识别、身份认证和关系识别认证;
71、所述各段道路流量状况时空变化规律逻辑范式和模型,所述各段道路不确定因素发生情况时空变化规律逻辑范式和模型,所述各段道路空间中对人、机、物赋码和或命名的时空变化规律逻辑范式和模型,所述各段道路空间的交通、导航和预警的管理规则、规范和标准的更新范式和模型,均属于事件时空变化规律逻辑范式和模型;
72、存储实时导航预警关联信息,删除过期无效存储信息。
73、进一步地,s4所述每段道路上行人行车之间建立轨迹关联和建立关联度量参数和指标包括:
74、建立每段道路上行人行车信息和或其所赋码和或命名与其移动轨迹的关联,形成行人行车轨迹映射数据库;
75、行人行车轨迹由相应路段的摄像传感设备实时采集和或行人行车各自带摄像传感手机平板设备实时采集上传所述分布式命名导航行人行车预警系统;
76、所述分布式命名导航行人行车预警系统包括利用gps导航定位、北斗导航定位、基站定位、网络信号定位、视觉定位、传感器定位获得相应道路路段的行人行车移动轨迹和实时定位信息;
77、每行人每行车多种方式获得的移动轨迹区分表示;
78、每段道路上,每行人每行车的赋码和或命名,及其包络,和移动轨迹建立关联,形成行人行车轨迹匹配映射数据库;
79、所述行人行车关联度量参数和指标包括但不限于轨迹时间和地点、轨迹线长度、轨迹线变化速度、轨迹线变化加速度、多轨迹线之间相对距离、多轨迹线之间相对速度、多轨迹线之间相对加速度、多轨迹时空关联数、多轨迹时空关联连接结构、多轨迹时空关联连接结构密度,多轨迹时空关联道路连接结构密度,多轨迹时空关联连接结构变化趋势,多轨迹时空关联连接结构变化速度,多轨迹时空关联连接结构变化加速度;
80、所述数据关联的关联方式和关联结构采用决策树方式、矩阵方式、知识图谱方式、流形关联、流动空间关联。
81、进一步地,s4中将进入每段道路的所有行人行车建立关联,用连接线连接各行人行车的包络,每行人每行车连接该路段上的所有行人行车,或仅连接其周围相近的其他行人行车;
82、连接线根据行人行车的移动状况延长或缩短,连接线长度形成行人行车之间或行人行车轨迹之间的相对距离量化度量值,连接线长度及其变化根据环境视频流图像上面的连接线长度直接测定,或根据所关联的行人行车的相对运动速度、相对加速度、相对位置和相对移动轨迹进行计算和预测;
83、作为优选,s4中连接线长度代表时空轨迹的实时相对距离,连接线延长或缩短的速度和加速度代表相关联双方之间的相对速度和相对加速度,连接线长度及其变化根据环境视频流图像上面的连接线长度直接测定,或根据关联双方的实际相对速度、相对加速度、相对位置和相对移动轨迹进行计算和预测;
84、作为优选,s4中分布式命名导航行人行车预警系统会自动为行人行车建立度量连接线,用户也可根据自身周边环境,调整选择与周围行车、行人建立度量连接线,每行人或每行车的连接线数为该行人或该行车的连接度;
85、作为优选,s4中行人行车用户实时与分布式命名导航行人行车预警系统交互信息,实现最佳个性化预警需求;
86、作为优选,s4中连接线显示存在或隐式存在;
87、作为优选,s4中某行人或某行车与其所有相连接的其他行人行车总数目与该行人或该行车与其所有相连接的其他行人行车中最外围行人行车闭环连接起来所占用道路的面积或空间体积的比值为该行人或该行车的连接结构密度;
88、关联度量参数和指标包括但不限于连接线长度、连接线变化速度、连接线变化加速度、相对距离、相对速度、相对加速度、连接度、连接结构、连接结构密度,道路连接结构密度,结构变化趋势,结构变化速度,结构变化加速度;
89、作为优选,s4中某段道路上的所有行人行车总数目与该段道路的面积或空间体积的比值,或者与该段道路上最外围行人行车闭环连接起来所占用道路的面积或空间几何体积的比值为该段道路的道路连接结构密度;
90、实时生成表示每段道路上每行人每行车的关联度量参数和指标值和部分或全部路段的行人行车道路连接结构密度值。
91、进一步地,s4中还包括:
92、根据行人行车之间时空关联连接结构图、结构时空变化趋势、结构时空变化速度、结构时空变化加速度和其他时空变化关联度量参数和指标值,并根据导航规则、规范、标准等和或预警规则、规范、标准,计算规划生成时空动态地图、协同计算规划生成每行人每行车的时空相对定位和导航路线、计算规划生成每行人每行车的导航指令、预警指令和事件表示、分类及描述、计算规划生成行人行车的时空导航逻辑范式或图范式和时空预警逻辑范式或图范式;
93、作为优选,s4中每次将道路空间中的部分或全部人、机、物和或一些风险点位用连接线连接建立关联;
94、作为优选,s4中人、机、物和或风险点位的关联能够跨道路路段关联,或跨道路空间关联;
95、作为优选,s4中连接线的连接点为人、机、物和或一些风险点位本身上面的关键点,或人、机、物和或一些风险点位包络上面的关键点,每次连接线连接每个人、机、物和或一些风险点位本身和或包络上面的单个或多个关键点;
96、多人、机、物作为一个整体进行包络,并与周围其他人、机、物和或其他多人、机、物整体之间建立关联,根据需求,其中多人、机、物整体内部之间还建立关联;
97、作为优选,s4中分布式命名导航行人行车预警系统自动将某些人、机、物关联,并将所述关联构成某种动态或静态几何形状或形体,实时导航或预警所述关联的人、机、物按照所述分布式命名导航行人行车预警系统指定的移动速度、移动导航路线、移动加速度等进行移动和或飞行,使得所述关联的人、机、物之间的关联连接几何形状或形体时刻按照预定的和或根据需求实时生成的动态几何形状或形体的变化而变化;
98、所述人、机、物可分布在不同的道路路段上,或分布在同一道路路段上,或分布在不同不动产位置,所述人、机、物中包括动态对象和静态对象,所述人、机、物可相邻也可不相邻,所述关联导航和预警方式应用在导航、预警或追踪的多场景中;
99、进一步地,s4中分布式命名导航行人行车预警系统通过长时间学习计算道路环境状况、道路流量状况、道路不确定因素发生情况和道路人、机、物关联连接结构变化情况,形成各段道路环境状况时空变化规律逻辑范式和模型,形成各段道路流量状况时空变化规律逻辑范式和模型,形成各段道路不确定因素发生情况时空变化规律逻辑范式和模型,形成各段道路空间中对人、机、物赋码和或命名的时空变化规律逻辑范式和模型,形成各段道路空间的交通、导航和预警的管理规则、规范和标准的更新范式和模型,形成各段道路空间中对人、机、物关联连接结构的时空变化规律逻辑范式和模型;
100、根据各段道路空间中对人、机、物关联连接结构的时空变化规律逻辑范式和模型对相应道路空间中人、机、物进行关联连接和计算;
101、所述各段道路流量状况时空变化规律逻辑范式和模型,所述各段道路不确定因素发生情况时空变化规律逻辑范式和模型,所述各段道路空间中对人、机、物赋码和或命名的时空变化规律逻辑范式和模型,所述各段道路空间的交通、导航和预警的管理规则、规范和标准的更新范式和模型,所述各段道路空间中对人、机、物的关联连接结构的时空变化规律逻辑范式和模型,均属于事件时空变化规律逻辑范式和模型;
102、存储实时导航预警关联信息,删除过期无效存储信息。
103、进一步地,s4中还包括:
104、根据道路动态和静态环境时空数据建立道路环境时空对比度量参数和指标;
105、根据道路气象环境时空数据建立道路气象环境时空对比度量参数和指标;
106、根据行人人群结构数据建立人群结构对比度量参数和指标;
107、根据行车车群结构数据建立车群结构对比度量参数和指标;
108、根据各路段道路连接结构数据建立道路连接结构对比度量参数和指标;
109、根据人、机、物连接结构数据建立人、机、物连接结构对比度量参数和指标;
110、根据人、机、物集群时空轨迹数据建立集群轨迹数据对比度量参数和指标;
111、根据道路环境、气象环境、相应行人行车或人、机、物独立移动或集群移动的关联连接结构数据建立道路环境、气象环境、相应行人行车或人、机、物相关联时空场景的场景对比度量参数和指标;
112、根据实际轨迹数据建立轨迹数据对比度量参数和指标,通过实时计算推理轨迹对比度量参数和指标值,并根据导航规则、规范、标准等和或预警规则、规范、标准等,计算规划生成时空动态地图、协同计算规划生成每行人每行车的时空相对定位和导航路线、计算规划生成每行人每行车的导航指令、预警指令和事件表示、分类及描述、计算规划生成行人行车的时空导航逻辑范式或图范式和时空预警逻辑范式或图范式;
113、存储实时导航预警关联信息,删除过期无效存储信息。
114、进一步地,s5中分布式命名导航行人行车预警系统实时计算并导航和或预警包括但不限于:
115、学习计算并推理预测生成和更新行人行车导航预警事件发生的时空变化规律、逻辑范式和模型;
116、学习计算并协同推理预测生成和更新行人行车之间关联方式和关联度量参数和指标和关联度量参数和指标计算逻辑范式和关联度量参数和指标值;
117、学习计算并推理预测生成和更新环境气象状况;
118、学习计算并推理预测生成和更新道路环境动态状况;
119、学习计算并协同推理预测生成每行人每行车规划地图,并实时更新地图;
120、学习计算并协同推理预测生成和更新每行人每行车相对定位、导航范式、导航路线;
121、学习计算并协同推理预测生成和更新每行人每行车预警范式、预警等级;
122、学习计算并推理预测生成和更新预警事件类别、强度和评估方法;
123、学习计算并推理预测生成和更新导航规则、规范、标准等和预警规则、规范、标准等;
124、学习计算并推理预测生成和更新导航指令和预警指令;
125、学习计算并推理预测系统内和系统间的安全故障点和安全薄弱点,生成和实时更新协同安全计算范式。
126、进一步地,s5中学习计算并推理预测生成和更新技术包括各类智能学习计算技术,包括映射学习、穿越学习、强化学习、统计学习、对比学习、归纳学习、对抗学习、深度神经网络学习、联邦学习、分布式学习、transformer模型、概率学习、进化学习、指令学习、关联学习、事件时空模型学习。
127、进一步地,s5中根据学习计算并推理预测生成的结果,对比导航规则、规范、标准和或预警规则、规范、标准,判别决策生成地图、更新地图、相对定位、导航路线、导航指令、预警级别、预警指令、事件表示分类及描述信息。
128、进一步地,所述事件时空模型学习是指通过对事件的时空变化规律学习,可以计算推理预测生成相关联事件的部分和或全部时空变化的模型、逻辑范式、状态曲线、几何结构、动态特征、扩散效能传递度量范式、知识语言语义图谱等,在此基础上,进一步智能关联学习,可演绎归纳和进化生成更高级的事件时空变化规律模型的智能科学技术;
129、所述指令学习是指通过对指令语言的学习和理解,可以推理生成指令的语义、逻辑和执行过程,可以决策生成新的可靠可用的指令的智能科学技术,指令语言包括文本语言、语音语言、符号语言、图像语言、视频流语言、多模态语言等。
130、所述关联学习包括根据知识资源库,通过对数据语义理解,根据语义概念和语义内涵的关联关系对数据进行时空表示和处理,执行数据自动分类化、规范化和标准化过程,自动构建数据关联的网络化流动空间,形成智能导航数据映射知识图谱和资源库,并根据数据关联关系和数据关联度度量方法,自动生成数据时空变化逻辑范式或图范式以及数据关联事件时空变化逻辑范式或图范式。
131、本发明还公开了一种分布式命名导航行人行车预警装置,包括依据分布式命名导航行人行车预警系统中输入模块、输出模块、安全计算处理模块、导航预警控制模块、导航预警事件管理模块、存储模块、地图模块、环境气象模块、道路环境模块、行人模块、行车模块、轨迹模块、关联模块、可视化模块、硬件管理模块、软件管理模块、语言图像知识库模块、导航语言翻译navit模块、网络连接控制模块、道路和不动产关联知识数据库或云模块、web交互操作系统模块中的一个模块或两个模块组合集成或多个模块组合集成或全部模块组合集成而形成的装置类型。
132、每个装置可单独使用,也可多个装置互联互通形成新的装置;
133、装置可嵌入在分布式命名导航行人行车预警系统中使用,也可嵌入在互联网中使用。
134、进一步地,所述分布式命名导航行人行车预警装置包括:至少一个处理器和存储器;
135、所述存储器存储计算机执行指令;
136、所述至少一个处理器执行所述存储器存储的计算机执行指令,使得所述至少一个处理器执行上述分布式命名导航行人行车预警方法。
137、本发明还公开了一种分布式命名导航行人行车预警芯片,包括依据分布式命名导航行人行车预警系统中输入模块、输出模块、安全计算处理模块、导航预警控制模块、导航预警事件管理模块、存储模块、地图模块、环境气象模块、道路环境模块、行人模块、行车模块、轨迹模块、关联模块、可视化模块、硬件管理模块、软件管理模块、语言图像知识库模块、导航语言翻译navit模块、网络连接控制模块、道路和不动产关联知识数据库或云模块、web交互操作系统模块的每个模块采集、计算、传输、控制、关联处理数据的方式方法所设计的各种类型芯片。
138、本发明还公开了一种分布式命名导航行人行车预警关联芯片、关联处理器或关联装置,包括由输入单元、输出单元、关联控制单元、关联计算单元、关联学习单元、关联度量参数和指标单元、关联拓扑结构单元、关联存储单元、关联生成决策单元、网络连接控制单元中的多种单元集成或全部单元集成的所有关联芯片、关联处理器或关联装置;
139、输入单元负责输入关联芯片、关联处理器或关联装置负责推理计算和或生成的事件的已知关联数据以及安全处理方式方法,如各段道路空间中行人行车视频流、图形图像、行人行车轨迹数据、道路环境数据、环境气象数据、行人行车导航或预警需求;
140、输出单元负责输出关联芯片、关联处理器或关联装置负责推理计算和或生成的事件的用于导航和或预警的关联数据以及安全处理决策;
141、关联控制单元负责需要推理计算和或生成的事件的规则、规范和或标准以及安全处理的方式方法,控制和调整所述关联芯片、关联处理器或关联装置的各个单元的互联互通和各个单元的安全处理方式方法;
142、关联计算单元根据导航和或预警规则、标准,负责推理计算和或生成事件的关联逻辑运算和结果数据,包括与各种安全计算的融合、评估以及加解密;
143、关联学习单元负责关联事件时空变化规律的学习和预测计算,如各道路空间每个时间段流量状况、道路环境状况、环境气象状况、连接结构状况、地图构建状况、路径规划状况、相对定位状况、导航路线状况、预警事件状况、安全计算方式方法;
144、关联度量参数和指标单元负责推理计算和或生成事件的度量参数和指标的选择、生成、更新;
145、关联拓扑结构单元负责所计算事件的关联拓扑结构的生成、排序、对比和推理计算以及安全处理,如行人行车连接拓扑结构,道路上人、机、物连接拓扑结构,各段道路与与其接续道路以及周边不动产的连接拓扑结构,地图协同构建拓扑结构,行人行车赋码和或命名与行人行车轨迹及包络的匹配映射拓扑结构,分布式命名导航行人行车预警系统输入模块对应接口和或设备连接拓扑结构,分布式命名导航行人行车预警系统输出模块对应接口和或设备连接拓扑结构,网络传输路由拓扑;
146、关联存储单元负责存储关联芯片、关联处理器或关联装置各个单元的关联数据、关联算力、关联模型信息;
147、关联生成决策单元负责根据计算结果和导航和或预警规则、标准生成导航和或预警以及关联事件决策信息和或决策指令,决策信息可为相对定位信息,导航路线信息,地图构建与更新,预警类别、级别、指令,事件评估方法、规则、标准和结果,新的导航和或预警规则、标准、方式方法;
148、网络连接控制单元负责与关联各类网络的连接,负责与互联网的信息交互、各种api接口的连接控制、网络状况计算、连接协议设计、信息网络传输的安全处理;
149、所述分布式命名导航行人行车预警关联芯片、关联处理器或关联装置可时空多维多模态数据并行协同计算并输出,也可单维单模态数据独立计算并输出。
150、本发明还公开了一种分布式命名导航行人行车预警系统的关联协同计算模型,包括:
151、通过对各道路路段气象环境、行人行车、道路环境数据的协同计算,推理得出道路连接结构以及路径规划和实时地图的信息数据,进一步通过对道路连接结构、路径规划和实时地图数据的协同计算,推理得出人、机、物相对定位以及连接结构与实时地图的关联地图的信息数据,进一步通过对人、机、物相对定位、连接结构与实时地图的关联地图数据的协同计算,推理得出预警决策评估、关联事件管理、行人行车轨迹和导航路线的信息数据,所述预警决策评估、关联事件管理、行人行车轨迹和导航路线的信息数据会实时反馈至每一步协同计算,帮助推理决策计算相应每一步协同计算后面的数据结果,形成导航和预警关联数据深度感知认知闭环流动空间;
152、所述预警决策评估包括预警决策信息和对预警决策信息的评估信息;
153、所述关联事件管理包括关联事件信息和对事件的管理信息,所述关联事件包括各段道路上发生的各类确定事件和不确定事件,包括导航事件和预警事件,包括所述分布式命名导航行人行车预警系统或网络安全事件;
154、所述关联协同计算模型通过芯片集群协同计算的方式实现,或通过处理器集群协同计算的方式实现,或芯片和处理器联合集群协同计算的方式实现;
155、所述关联协同计算模型的关联数据包括各段道路当前气象环境、各段道路气象环境时空变化规律、各段道路气象环境时空逻辑范式和图范式、各段道路当前静态环境、各段道路静态环境时空变化规律、各段道路静态环境时空逻辑范式和图范式、各段道路当前动态环境、各段道路动态环境时空变化规律、各段道路动态环境时空逻辑范式和图范式、各段道路当前行人行车及需求、各段道路行人行车及需求时空变化规律、各段道路行人行车及需求时空逻辑范式和图范式、各段道路当前连接结构、各段道路连接结构时空变化规律、各段道路连接结构时空逻辑范式和图范式、各段道路当前路径规划和实时地图、各段道路路径规划和实时地图时空变化规律、各段道路路径规划和实时地图时空逻辑范式和图范式、各段道路当前行人行车相对定位、各段道路行人行车相对定位时空变化规律、各段道路行人行车相对定位时空逻辑范式和图范式、连接结构与实时地图的当前关联地图、连接结构与实时地图的关联地图时空变化规律、连接结构与实时地图的关联地图时空逻辑范式和图范式、各段道路当前预警决策评估、各段道路预警决策评估时空变化规律、各段道路预警决策评估时空逻辑范式和图范式、各段道路当前行人行车轨迹、各段道路行人行车轨迹时空变化规律、各段道路行人行车轨迹时空逻辑范式和图范式、各段道路当前关联事件管理、各段道路关联事件管理时空变化规律、各段道路关联事件管理时空逻辑范式和图范式、各段道路当前导航路线、各段道路导航路线时空变化规律、各段道路导航路线时空逻辑范式和图范式。
156、与现有技术相比,本发明的优点在于:
157、针对行人行车可自动进行风险预警分析和预测,及时评估和预警可能造成安全隐患的事件情况,极大程度降低行人行车发生事故的概率,保障交通安全和用户的合法权益,同时提高数据传输处理的效率,减少传输数据量,有效降低系统和或网络能耗,增强导航、追踪和预警等应用的精准性、实时性和安全可靠性。
- 还没有人留言评论。精彩留言会获得点赞!