一种智能驾驶的交通标志图像数据识别系统的制作方法
本发明涉及智能驾驶图像处理,具体为一种智能驾驶的交通标志图像数据识别系统。
背景技术:
1、道路交通标志识别作为高级驾驶辅助的一个基础分支,也是提高交通安全和效率的重要手段,其主要利用车载专用镜头,配合高清图像感光芯片,采集道路上的交通标志图像数据。采用数据处理器对采集到的原始图像数据进行裁剪、去噪、标准化等处理,以提高后续识别的准确性和效率。通过软件算法对图像进行颜色、形状、纹理等特征提取,从中提取出与交通标志相关的特征信息。利用机器学习算法对提取出来的特征信息进行特征分类,将其判别为不同的交通标志类型。根据特征分类的结果,对识别到的交通标志进行决策判别和输出,以提供给智能驾驶系统做出相应的行驶决策。
2、参考中国专利公开号为cn109886210b的一种交通图像识别方法、装置、计算机设备和介质,通过将车辆采集的视频流中的图片输入至去干扰自编码器,经过去干扰自编码器的预处理得到滤除干扰的图片,进而将无干扰的图片输入至交通标志识别模型进行识别处理,从而方便后续产生正确的车辆控制指令,解决了对抗样本对交通标志识别模型进行攻击导致交通标志识别错误的问题;可以降低交通图像中对抗样本的干扰,提高图像的识别正确率,提升无人驾驶或智能驾驶的安全性。参考中国专利公开号为cn109002764b的一种交通标志图像识别模型构建及识别方法,通过基于改进的zf卷积神经网络,结合空间变换网络,训练得到应用于交通标志识别的网络模型,能够避免交通标志扭曲,形变造成的错识别问题,提高交通标志识别率。
3、综合分析上述参考专利,可得出以下缺陷:现有的交通标志识别系统仅仅是依靠图像特征提取识别对比分析方法,来对采集的道路视图内的交通标志进行识别分析,这样的识别方法在针对交通标志部分缺失或背障碍物部分遮挡的情况下无法正常识别,从而不能确保车辆安全智能驾驶,例如参考专利cn109886210b的一种交通图像识别方法、装置、计算机设备和介质和cn109002764b的一种交通标志图像识别模型构建及识别方法虽然采用去噪和神经网络特征训练的方法来对采集的视图中模糊不清的交通标志进行清晰识别,但是针对交通标志部分缺失,例如:交通标志在户外长期使用被部分腐蚀掉漆或者被道路旁树叶部分遮挡等情况出现时,仅仅依靠上述两个参考文件的清晰度处理算法进行处理,无法解决该问题,不能实现通过将第三方应用获取的道路交通数据来与实际行驶采集的道路数据之间进行有机结合,来实现对道路交通标志进行更加全面和精确的识别分析,无法达到通过利用车辆所处位置的联网道路交通标志数据辅助实际行驶识别的数据来建立识别出的完整交通标志模型的目的,从而不能既快速又精确的识别出部分残缺的交通标志,给人们的智能安全驾驶带来极大的不便。
技术实现思路
1、针对现有技术的不足,本发明提供了一种智能驾驶的交通标志图像数据识别系统,解决了现有的交通标志识别系统仅仅是依靠图像特征提取识别对比分析方法,来对采集的道路视图内的交通标志进行识别分析,这样的识别方法在针对交通标志部分缺失或背障碍物部分遮挡的情况下无法正常识别,从而不能确保车辆安全智能驾驶的问题。
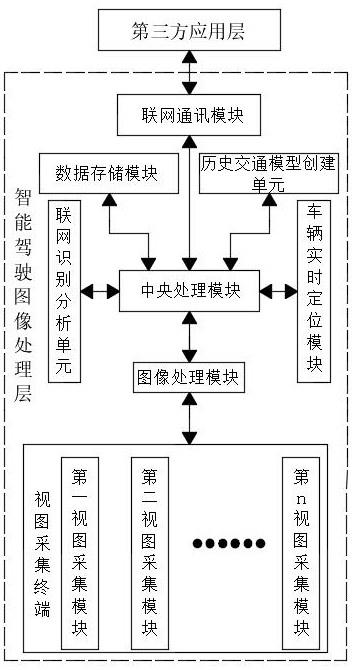
2、为实现以上目的,本发明通过以下技术方案予以实现:一种智能驾驶的交通标志图像数据识别系统,包括智能驾驶图像处理层以及与智能驾驶图像处理层通过无线网络建立通信的第三方应用层,所述智能驾驶图像处理层包括:
3、中央处理模块,用于对整个图像识别系统进行控制;
4、视图采集终端,用于对汽车行驶道路周围环境的视频图像数据进行实时采集;
5、图像处理模块,用于通过采用图像识别分析算法对视图采集终端所采集视频图像中的道路交通标志特征进行提取、识别和分析处理;
6、车辆实时定位模块,用于对车辆所处位置进行实时定位;
7、联网识别分析单元,用于通过联网辅助分析算法对图像处理模块分析出来的图像数据进行再次辅助识别对比分析处理,使图像处理模块在对采集的部分残缺的交通标志图像进行二次分析判定和决策处理;
8、历史交通模型创建单元,用于通过数据存储建模算法对车辆智能行驶过程中经过视图采集终端、图像处理模块、车辆实施定位模块和联网识别分析单元处理后的道路路径交通标志数据进行历史路径交通模型的创建,使车辆行驶在历史路径过程中能够直接提取历史路径交通模型进行使用。
9、优选的,所述智能驾驶图像处理层还包括联网通讯模块,中央处理模块通过联网通讯模块与第三方应用层之间建立无线网络通讯,用于向第三方应用层获取无线道路交通数据。
10、优选的,所述智能驾驶图像处理层还包括数据存储模块,用于对车辆智能行驶过程中经过视图采集终端采集的视图数据、图像处理模块处理后的数据、车辆实施定位模块定位的车辆行驶轨迹数据、联网识别分析单元处理后的道路路径交通标志数据以及历史交通模型创建单元创建的历史路径交通模型数据进行存储。
11、优选的,所述视图采集终端是由n个视图采集模块组成,且n个视图采集模块安装分布于车辆车身的四周,用于实时拍摄采集车辆行驶过程中的道路交通图像数据。
12、优选的,所述联网辅助分析算法具体包括以下步骤:
13、s1、获取图像处理模块识别分析得到的实际道路交通标志特征数据集合x=\left [ {x\left ( {1} \right ),x\left ( {2} \right )\cdot \cdot \cdot ,x\left ( {m} \right )} \right ],其中m为获取图像处理模块识别分析的图像的数量,而为经过图像处理模块处理后的第m张交通标志特征数据矩阵,其具体如下:其中:m表示识别的单个图像中交通标志种类的个数,n为单个图像的每种交通标志中对应的图像纹理特征值个数,为识别的单个图像中第m种交通标志数据组成的数据集合,为识别出单个图像的第m种交通标志数据中第n个图像纹理特征值数据;
14、获取的图像处理模块识别分析得到的单个图像中交通标志数据组成的数据集合包括完整交通标志特征数据集合和不完整的交通标志特征数据集合,其中不完整的交通标志特征数据集合即为采集识别的部分残缺的交通标志图像特征;
15、s2、此时通过获取车辆实时定位模块所定位的车辆所处位置数据信息,并向第三方应用层获取该车辆位置数据信息所对应的联网交通标志特征数据集合y=\left [ {y\left ( {1} \right ),y\left ( {2} \right )\cdot \cdot \cdot ,y\left ( {d} \right )} \right ],其中d为获取此位置所对应的联网图像数量,而为向第三方应用层获取的第d张交通标志特征数据矩阵,其具体如下:其中:d表示获取的此车辆位置的单个图像中交通标志种类的个数,e为从第三方应用层获取此车辆位置的单个图像的每种交通标志中对应图像纹理特征值个数,为从第三方应用层获取此车辆位置的单个图像中第d种交通标志数据组成的数据集合,为从第三方应用层获取此车辆位置的单个图像的第d种交通标志数据中第e个图像纹理特征值数据;
16、s3、将步骤s1获取的图像处理模块识别分析得到的交通标志特征数据集合x=\left [ {x\left ( {1} \right ),x\left ( {2} \right )\cdot \cdot \cdot ,x\left ( {m} \right )} \right ]中的每张完整的交通标志特征数据矩阵特征数据与步骤s2此时向第三方应用层获取该车辆位置数据信息所对应的联网交通标志特征数据集合y=\left [ {y\left ( {1} \right ),y\left ( {2} \right )\cdot \cdot \cdot ,y\left ( {d} \right )} \right ]中的每张交通标志特征数据矩阵特征数据进行求差对比,然后将对比结果按照完全匹配和完全不匹配两种类型进行分类处理;
17、 s4、当对比结果有完全匹配的交通标志数据组成的数据集合,即时,表示此对比结果为采集的图像中交通标志与联网获取车辆位置的交通标志相匹配,则车辆按照完全匹配的交通标志数据组成的数据集合所对应的交通标志执行相应驾驶指令即可,当对比结果有完全不匹配的交通标志数据组成的数据集合,即和完全不相等时,表示此对比结果为采集的图像中交通标志与联网获取车辆位置的交通标志不相匹配,则车辆按照步骤s1中获取图像处理模块识别分析得到的实际道路交通标志特征数据集合的交通标志执行相应智能驾驶指令即可;s5、将步骤s1获取的图像处理模块识别分析得到的交通标志特征数据集合x=\left [ {x\left ( {1} \right ),x\left ( {2} \right )\cdot \cdot \cdot ,x\left ( {m} \right )} \right ]中的每张不完整的交通标志特征数据矩阵特征数据与步骤s2此时向第三方应用层获取该车辆位置数据信息所对应的联网交通标志特征数据集合y=\left [ {y\left ( {1} \right ),y\left ( {2} \right )\cdot \cdot \cdot ,y\left ( {d} \right )} \right ]中的每张交通标志特征数据矩阵特征数据进行求差对比,使获取的不完整的识别的单个图像中交通标志数据集合中的各个特征数据与从第三方应用层获取此车辆位置的单个图像中交通标志数据集合中的各个特征数据求差,然后统计每个从第三方应用层获取此车辆位置的单个图像中交通标志数据集合中相同特征值的个数a占从第三方应用层获取此车辆位置的单个图像中交通标志数据集合中特征值的总个数b中的百分比,即为相似度δ,具体公式如下:s6、将步骤s5中得到的各个相似度δ进行排序,再从中提取相似度最高的一组从第三方应用层获取此车辆位置的单个图像中交通标志数据集合为预选特征集合,然后判断预选特征集合是否大于临界相似度β%,若大于等于β%,则判定该预选特征集合为目标特征集合,将不完整的识别的单个图像中交通标志数据集合替换成目标特征集合内的特征值,从而完成将采集的部分残缺的交通标志图像补全,然后进行步骤s3的完全匹配类型的识别操作;
18、s7、若小于β%,则判定该预选特征集合为非目标特征集合,即判定为未识别到准确交通标志,然后车辆按照此时向第三方应用层获取该车辆位置数据信息所对应的联网交通标志特征数据集合的交通标志执行相应智能驾驶指令即可。
19、优选的,所述步骤s3中对比时每张图像的交通标志特征数据矩阵与向第三方应用层获取的该时刻和位置的交通标志特征数据矩阵进行对比,即判断和中各特征数据是否相同,其中m=d。
20、优选的,所述步骤s3中在每张图像内的交通标志特征数据矩阵对比时,将中每种交通标志数据组成的数据集合中的特征数据进行排列组合一一对比,判断是否相同。
21、优选的,所述步骤s6中临界相似度β%的取值范围为30%-60%。
22、优选的,所述数据存储建模算法为哈希算法或树形结构算法中的一种。
23、本发明提供了一种智能驾驶的交通标志图像数据识别系统。与现有技术相比具备以下有益效果:
24、(1)、该智能驾驶的交通标志图像数据识别系统,可实现通过将第三方应用获取的道路交通数据来与实际行驶采集的道路数据之间进行有机结合,来对道路交通标志进行更加全面和精确的识别分析,很好的达到了通过利用车辆所处位置的联网道路交通标志数据辅助实际行驶识别的数据来建立识别出的完整交通标志模型的目的,在依靠图像特征提取识别对比分析的基础上,结合联网道路与交通标志数据,来针对交通标志部分缺失或背障碍物部分遮挡的情况下进行正常识别,从而确保车辆安全智能驾驶,即使遇到交通标志在户外长期使用被部分腐蚀掉漆或者被道路旁树叶部分遮挡等情况出现时,也能够进行智能判断分析处理,确保智能车辆的正常智能驾驶,从而既快速又精确的识别出部分残缺的交通标志,大大方便了人们的智能安全驾驶。
25、(2)、该智能驾驶的交通标志图像数据识别系统,可实现通过将用户行驶过的数据信息和与之对应的获取过联网道路信息进行路线标志模型的创建,并存入数据库中,来方便后期用户再次沿着该路线行驶时,只需从数据库中提取对应路线交通标志模型来与实际采集道路标志信息对比分析,很好的达到了既快速又准确的不重复获取经过路线的交通标志信息数据的目的,避免了在采用联网获取道路交通标志信息时,由于交通道路环境因素影响,容易出现由于通信网络信号差导致获取时间较长或获取失败,从而无法正常实现通过联网获取第三方应用道路交通标志信息来辅助现场交通标志识别的情况发生,通过直接从数据库内调取车辆行驶的历史轨迹并与之对应的交通标志数据信息,来实现无联网状态下的历史数据的调取和利用,从而对在网络环境较差的智能驾驶十分有益。
- 还没有人留言评论。精彩留言会获得点赞!