基于车路协同的自动驾驶交通信号灯信息获取系统和方法与流程
本发明涉及自动驾驶,并且更具体地,涉及一种基于车路协调的自动驾驶交通信号灯信息获取系统和方法。
背景技术:
1、随着无人驾驶技术的逐渐成熟,无人驾驶车辆也开始在城市道路上行驶,这些无人驾驶车在交通信号灯附近的行驶决策和行驶路径依赖交通信号灯的状态,因此,提前获取道路交通信号灯状态非常必要。
2、目前,无人驾驶车辆获取交通信号灯状态常用的技术方案是采用摄像头进行交通信号灯图像信息采集,然后将图像输入深度学习神经网络进行交通信号灯状态识别,这种技术方案对摄像头分辨率要求很高,需要在自动驾驶车辆上配置算力强大的计算设备,此外,雾天、雨雪等恶劣天气和夜晚光线不足也会严重影响交通信号灯状态的准确识别,当自动驾驶车辆摄像头受到前方大型车辆遮挡时,自动驾驶车辆可能由于无法识别交通信号灯状态而出现自动停车或者继续前进造成交通事故。
3、因此,现有技术有待改进。
技术实现思路
1、针对现有技术的不足,本发明提出了一种基于车路协同的自动驾驶交通信号灯信息获取系统和方法,目的在于解决自动驾驶车辆在大雾、雨雪等恶劣天气、夜晚光线不充足、前方有遮挡等影响而无法正常采集和识别到交通信号灯状态、倒计时长的问题,提高自动驾驶车辆行驶的高效性、安全性,减少车载计算设备计算量,提高自动驾驶车辆的行驶安全性和稳定性。
2、为了解决上述技术问题,本发明采用以下技术方案:
3、根据本发明的第一方面,提供一种基于车路协调的自动驾驶交通信号灯信息获取系统,包括:
4、硬件采集卡,硬件采集卡部署在路端设备中,并在运行期间对道路交通信号灯数据进行实时收集;
5、车路协同边缘云平台和车路协同中心云平台,车路协同边缘云平台接收从硬件采集卡传输来的道路交通信号灯数据,并将道路交通信号灯数据处理后传输至车路协同中心云平台,并共享至周围的车路协同边缘云平台;
6、其中,在自动驾驶车辆驶入车路协同网络覆盖区域后,自动驾驶车辆将车辆位置信息和路径信息上传至车路协同边缘云平台,车路协同边缘云平台根据车辆位置信息和路径信息将车辆前方的道路交通信号灯数据自动下发给自动驾驶车辆,并且自动驾驶车辆将接收到的道路交通信号灯数据输入至自动驾驶系统,以供决策规划使用。
7、在本发明的一个实施例中,系统包括:
8、硬件采集卡依据地理位置和信号灯位置进行编号,硬件采集卡通过新型通信网络按固定频率使用mqtt的方式将道路交通信号灯数据传输至车路协同边缘云平台和车路协同中心云平台;
9、车路协同边缘云平台负责本区域内的数据接入和服务,并将数据汇总传输至车路协同中心云平台;
10、自动驾驶车辆上部署统一的sdk,负责接入和切换车路协同边缘云平台,对车辆位置信息、路径信息、导航信息的收集,对道路交通信号灯数据的接收,并将道路交通信号灯数据输入至自动驾驶系统,sdk和车路协同边缘云平台通过mqtt进行数据交互。
11、在本发明的一个实施例中,在车路协同中心云平台部署统一的接入网关,网关根据车辆上报的地理位置信息将车辆所在区域的车路协同边缘云平台接入地址返回给车端sdk。
12、在本发明的一个实施例中,车路协同边缘云平台根据车辆位置信息和行车路线,将车辆前方的道路交通信号灯数据通过mqtt广播给车端sdk。
13、在本发明的一个实施例中,区域交界处或区域毗邻的道路交通信号灯数据由相邻的多个车路协同边缘云平台数据互通,车辆跨区域过程行驶过程中,由上一个区域的车路协同边缘云平台将下一个区域的车路协同边缘云平台接入信息通过mqtt通知到车端sdk。
14、在本发明的一个实施例中,车端sdk接收到道路交通信号灯数据后,将数据按标准封装后输入至自动驾驶系统中,供自动驾驶系统决策规划使用。
15、根据本发明的第二方面,提供一种基于车路协调的自动驾驶交通信号灯信息获取方法,其特征在于,包括以下步骤:
16、1)自动驾驶车辆在车路协同网络覆盖范围内收集车辆位置和路径信息,并申请接入车路协同中心云平台;
17、2)车路协同中心云平台根据车辆位置信息将请求转发至车路协同边缘云平台,自动驾驶车辆与车路协同边缘云平台建立连接;
18、3)路端硬件采集卡将道路交通信号灯数据上传至车路协同边缘云平台和车路协同中心云平台,多个相邻的车路协同边缘云平台数据共享;
19、4)车路协同边缘云平台根据车辆位置信息和路径信息,向自动驾驶车辆广播前方道路交通信号灯数据;
20、5)自动驾驶车辆接收到道路交通信号灯数据后,将道路交通信号灯数据数据输入至自动驾驶系统,以供决策规划使用。
21、在本发明的一个实施例中,在步骤1)中,自动驾驶车辆集成统一sdk,在车路协同网络覆盖范围内,sdk收集车辆位置和路径信息,并申请接入车路协同云平台;在步骤2)中,自动驾驶车辆的sdk与车路协同边缘云平台通过mqtt建立连接;在步骤3)中,路端硬件采集卡将道路交通信号灯数据通过mqtt进行上传;在步骤4)中,向自动驾驶车辆的sdk通过mqtt广播前方道路交通信号灯数据;在步骤5)中,自动驾驶车辆的sdk接收到道路交通信号灯数据。
22、在本发明的一个实施例中,在步骤4)和步骤5)之间还包括如下步骤:
23、自动驾驶车辆由上一边缘云平台覆盖区域驶向下一边缘云平台覆盖区域时,上一车路协同边缘云平台负责通知sdk切换至下一车路协同边缘云平台重新连接mqtt,在切换过程中由上一车路协同边缘云平台负责将道路交通信号灯数据通过mqtt广播至sdk。
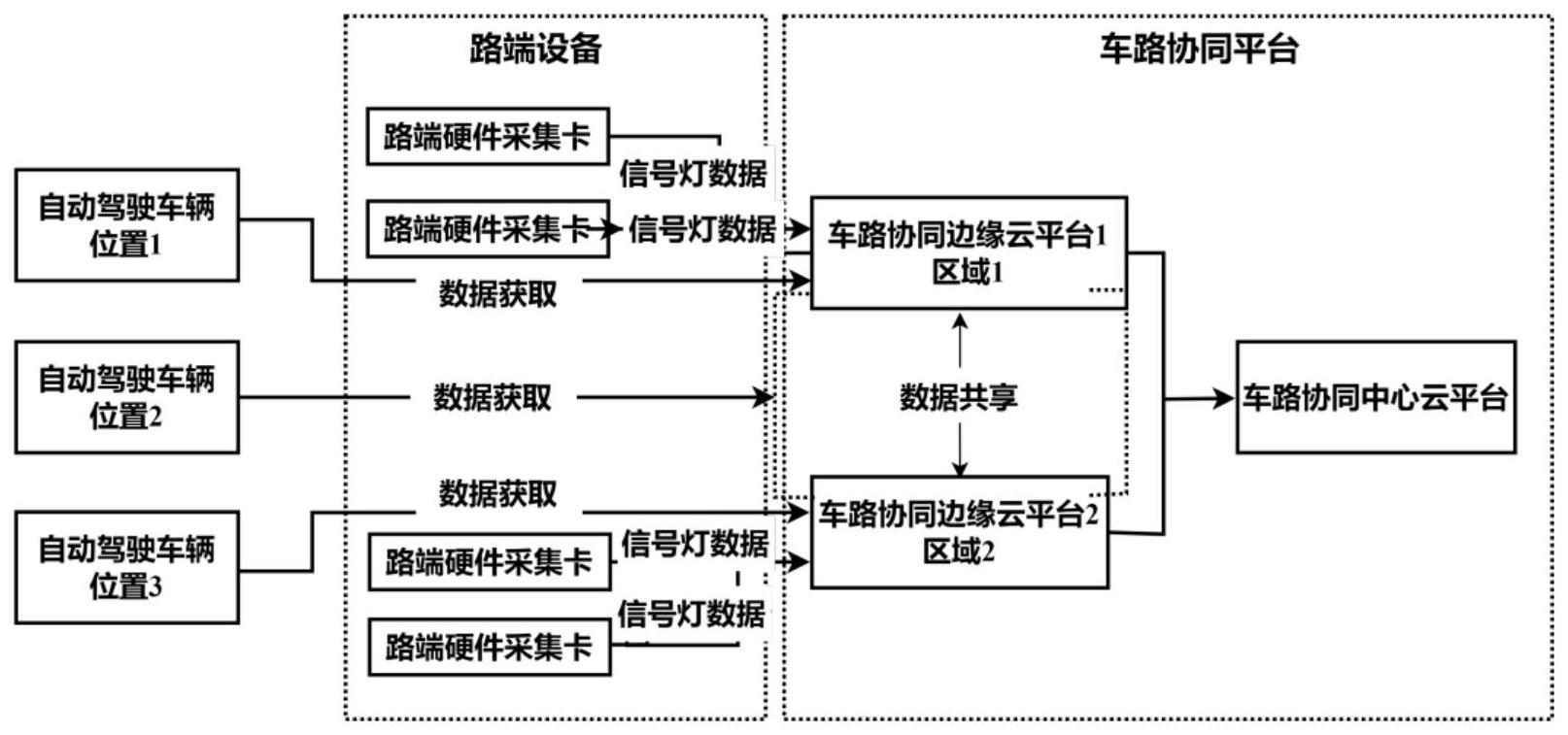
24、在本发明的一个实施例中,数据流程如下:
25、路端硬件采集卡采集道路交通信号灯数据后传送至车路协同边缘云平台;
26、车路协同边缘云平台将数据处理后上传至车路协同中心云平台,并共享至周围车路协同边缘云平台;
27、自动驾驶车辆驶入车路协同网络覆盖区域后,上传车辆位置信息和路径信息至车路协同边缘云平台;
28、车路协同边缘云平台根据车辆位置信息和路径信息将车辆前方的道路交通信号灯信息下发至自动驾驶车辆;
29、自动驾驶车辆接收到交通信号灯信息后,将数据输入至自动驾驶系统,供决策规划使用。
30、根据本发明的第三方面,提供一种基于车路协同的自动驾驶交通信号灯信息获取系统,包括:
31、硬件采集卡,硬件采集卡部署在路端设备中并在运行期间对相应的边缘云信号覆盖区域的道路交通信号灯状态数据进行实时采集;
32、车路协同边缘云平台和车路协同中心云平台,车路协同边缘云平台与车路协同中心云平台相互通信,车路协同边缘云平台在相应的边缘云信号覆盖区域中接收从硬件采集卡传输来的道路交通信号灯状态数据,并将道路交通信号灯状态数据传输到车路协同中心云平台进行汇总且通过车路协同中心云平台共享至其他边缘云信号覆盖区域中的车路协同边缘云平台;
33、其中,在自动驾驶车辆驶入相应的边缘云信号覆盖区域后,相应的边缘云信号覆盖区域中的车路协同边缘云平台实时自动接收自动驾驶车辆发出的不同类型的信号灯状态数据的请求信号,并根据接收到的信号灯状态数据的类型来接收车路协同中心云平台传送的对应类型的信号灯数据并将对应类型的信号灯数据自动下发给自动驾驶车辆,并且自动驾驶车辆将对应类型的信号灯数据输入至自动驾驶系统,以供决策规划使用。
34、在本发明的一个实施例中,在车路协同边缘云平台接收到自动驾驶车辆请求当前路口区域的信号灯状态数据的情况下,车路协同边缘云平台接收车路协同中心云平台传送的当前路口区域的信号灯状态数据并将当前路口区域的信号灯状态数据自动下发给自动驾驶车辆;在车路协同边缘云平台接收到自动驾驶车辆请求所在车道位置的车道信号灯状态数据的情况下,车路协同边缘云平台接收车路协同中心云平台传送的车道信号灯状态数据并将车道信号灯状态数据自动下发给自动驾驶车辆;在车路协同边缘云平台接收到自动驾驶车辆请求多个路口区域的信号灯状态数据的情况下,车路协同边缘云平台接收车路协同中心云平台传送的多个路口区域的信号灯状态数据并将多个路口区域的信号灯状态数据自动下发给自动驾驶车辆。
35、在本发明的一个实施例中,硬件采集卡基于相应的边缘云信号覆盖区域的地理位置和信号灯位置进行编号。
36、在本发明的一个实施例中,硬件采集卡采集的道路交通信号灯状态数据通过新型通信网络按照mqtt协议或者物理直连的方式传输到车路协同边缘云平台;车路协同边缘云平台与车路协同中心云平台之间通过新型通信网络相互通信,并且车路协同边缘云平台通过新型通信网络将对应类型的信号灯状态数据自动下发给自动驾驶车辆。
37、在本发明的一个实施例中,自动驾驶车辆上部署有统一的sdk,sdk负责接入和切换车路协同边缘云平台,sdk接收到车路协同边缘云平台下发的对应类型的信号灯状态数据后输入到自动驾驶系统中,供自动驾驶系统决策和路径规划。
38、根据本发明的第四方面,提供一种基于车路协同的自动驾驶交通信号灯信息获取方法,包括以下步骤:
39、1)通过部署在路端的硬件采集卡实时采集相应的边缘云信号覆盖区域的道路交通信号灯状态数据;
40、2)将相应的边缘云信号覆盖区域中硬件采集卡采集的道路交通信号灯状态数据传输到相应的边缘云信号覆盖区域中的车路协同边缘云平台,并将车路协同边缘云平台接收到的道路交通信号灯状态数据传输到车路协同中心云平台进行汇总且通过车路协同中心云平台共享至其他边缘云信号覆盖区域中的车路协同边缘云平台;
41、3)当自动驾驶车辆驶入边缘云信号覆盖区域时,边缘云信号覆盖区域中的车路协同边缘云平台实时自动接收自动驾驶车辆发出的不同类型的信号灯状态数据的请求信号,并根据接收到的信号灯状态数据的类型来接收车路协同中心云平台传送的对应类型的信号灯状态数据并将对应类型的道路交通信号灯状态数据自动下发给自动驾驶车辆,并且自动驾驶车辆将所述对应类型的信号灯数据输入至自动驾驶系统,以供决策规划使用。
42、在本发明的一个实施例中,步骤3)中进一步包含:
43、在车路协同边缘云平台接收到自动驾驶车辆请求当前路口区域的信号灯状态数据的情况下,车路协同边缘云平台接收车路协同中心云平台传送的所当前路口区域的信号灯状态数据并将当前路口区域的信号灯状态数据自动下发给自动驾驶车辆;在车路协同边缘云平台接收到自动驾驶车辆请求所在车道位置的车道信号灯状态数据的情况下,车路协同边缘云平台接收车路协同中心云平台传送的车道信号灯状态数据并将车道信号灯状态数据自动下发给自动驾驶车辆;在车路协同边缘云平台接收到自动驾驶车辆请求多个路口区域的信号灯状态数据的情况下,车路协同边缘云平台接收车路协同中心云平台传送的多个路口区域的信号灯状态数据并将多个路口区域的信号灯状态数据自动下发给自动驾驶车辆。
44、通过采用上述技术方案,本发明相比于现有技术具有如下优点:
45、本发明通过路端硬件采集卡实时获取交通信号灯信息,通过mqtt的方式进行数据传输,通过标准sdk接入无人驾驶系统,可以实现交通信号灯信息自动采集并上传至云端、根据无人驾驶车辆位置及规划路径自动获取前方交通信号灯信息并输入自动驾驶系统的功能。
46、本发明充分利用车路协同路端设备,将采集到的交通信号灯信息汇总到车路协同云平台,在无人驾驶车辆上集成sdk,通过mqtt进行数据交互,保证数据的正确性、实时性和有效性,为无人驾驶车辆的决策规划提供更可靠的交通信号灯信息。
47、本方案不需要基于摄像头采集的图像信息进行信号灯颜色、状态、倒计时长的计算,解决了自动驾驶车辆使用自身摄像头进行交通信号识别受恶劣天气、光线强弱、前方车辆遮挡等影响的问题,减少了自动驾驶系统因接收错误的交通信号而导致进入错误车道、长时间停车、交通事故的可能性,提高了道路交通安全和通行效率,增强了自动驾驶的可靠性。
48、本发明通过路端硬件采集卡实时获取交通信号灯信息,然后通过新一代移动通信专网快速传给边缘云网络覆盖区域的无人驾驶车辆,不是使用传统的2/3/4g通用网络进行信号灯信息传输,避免了当前地区接入主网的移动设备较多时导致车载设备信号不稳定或者数据传输效率下降问题,这种技术方案保证了信号状态数据的安全性和高效性,提高了数据传输效率。
49、本发明在数据传输时使用发布/订阅消息的模式,车路协同边缘平台可以通过广播的方式提供一对多的消息发布,也可以接收车辆的位置信息后实现一对一方式进行交通信号状态发布,实现对车辆的车道级精准服务。
50、本发明无需使用车载计算设备进行深度学习模型推理,减少了车载设备计算量,降低了对车载设备计算设备的要求,节约了用户的购车成本。
51、本发明使用车路协同边缘云平台进行信号灯状态数据的信息收集和使用车路协同中心云平台进行多个车路协同边缘云平台的数据共享,除了提供当前路口区域的信号灯状态外,还可以提供更远距离的交通信号灯状态,这可以为自动驾驶车辆的远距离绿色通行进行路径规划提供很大的帮助。
- 还没有人留言评论。精彩留言会获得点赞!