一种无信号灯路口的车辆调度方法及系统与流程
本发明属于交通,具体涉及一种无信号灯路口的车辆调度方法及系统。
背景技术:
1、随着经济与科技的发展,人们的生活水平不断提高,在城镇化的快速发展过程中,农村向中心村和小城镇转移,城镇化进程不断加快。同时,城镇之间的道路建设也在不断发展,但是有些交叉路口由于城镇化速度过快,还没有铺设信号灯等交通设施,车辆在通过交叉路口时容易发生交通事故。并且在车流量较小的路口设置交通信号灯,不仅需要大量的成本,还会严重影响路口的通行效率。
2、近年来,5g、车联网、大数据、云计算以及道路电子技术飞速发展,车路协同技术发展迅猛,该技术采用无线通信和新一代互联网等技术,全方位实施车车、车路动态实时信息交互,并在全时空动态交通信息采集与融合的基础上开展车辆主动安全控制和道路协同管理,充分实现人车路的有效协同,保证交通安全,提高通行效率,从而形成的安全、高效和环保的道路交通系统。利用车辆间的v2v通信,让多个车辆进行协作式决策,合理规划执行方案,保证车辆安全的通过路口,又能提高路口的通行效率。
技术实现思路
1、本发明的目的在于,提供一种无信号灯路口的车辆调度方法及系统,解决车流量较小的路口的交通问题。
2、本发明所采用的技术方案如下:
3、第一方面,本发明提供一种无信号灯路口的车辆调度方法,包括以下步骤:
4、获取无信号灯路口的待通行车辆,将其划分成车队形式;
5、确定离路口最近的两个车队,判断所述两个车队通过路口时的运行轨迹是否存在重叠区域;
6、若否,则所述两个车队不会发生碰撞,控制所述两个车队正常通过路口;
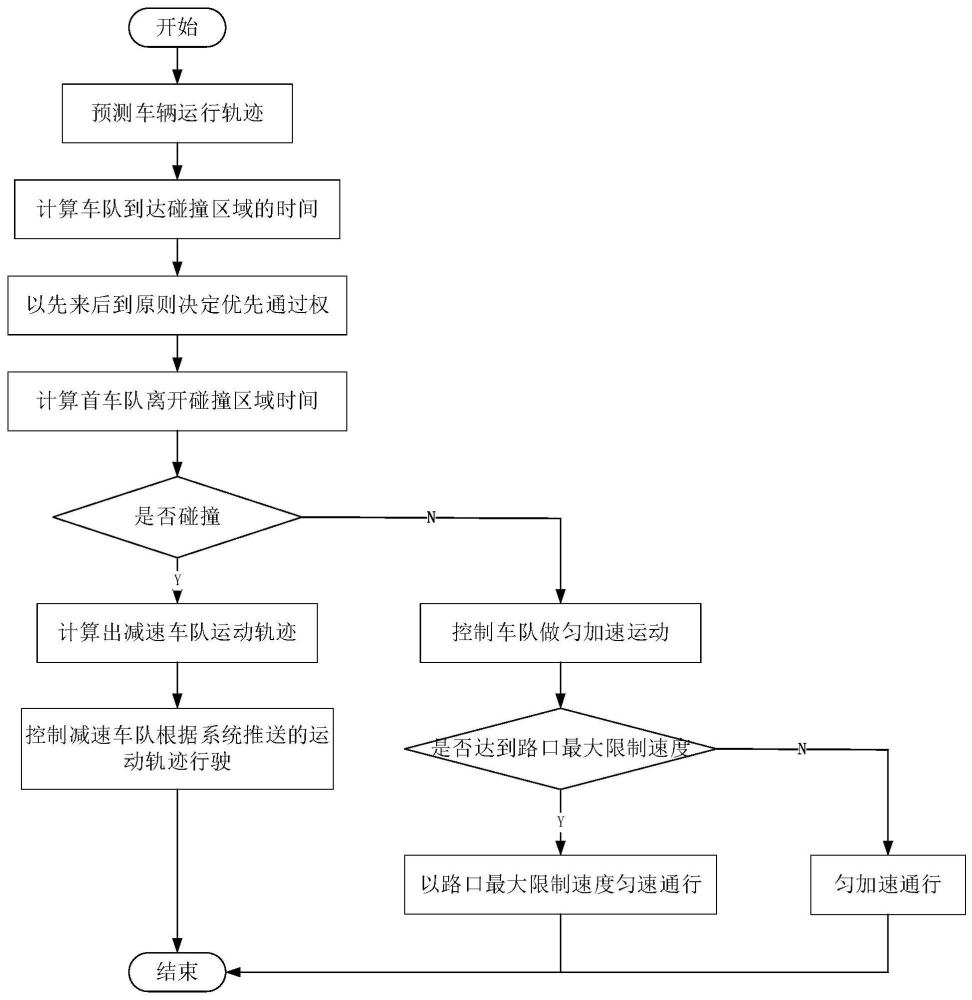
7、若是,则所述两个车队存在发生碰撞的可能,重叠区域即为可能的碰撞区域;并计算所述两个车队到达所述可能的碰撞区域的时间,按照先来后到的原则控制首先到达所述可能的碰撞区域的车队优先通行,控制另一车队后通行;
8、再计算优先通行的车队离开所述可能的碰撞区域的时间,结合后通行的车队到达所述可能的碰撞区域的时间,判断所述两个车队以当前速度通过路口时是否会发生碰撞;若是,则控制后通行的车队减速,使后通行的车队到达所述可能的碰撞区域的时间恰为优先通行的车队离开所述可能的碰撞区域的时间;若否,则控制后通行的车队加速,使后通行的车队到达所述可能的碰撞区域的时间恰为优先通行的车队离开所述可能的碰撞区域的时间,或控制后通行的车队正常通过路口。
9、可选的,车队的划分方法为:
10、确定领导车辆;
11、确定与领导车辆行驶方向相同且与领导车辆距离在一定范围内的目标车辆集合;行驶方向相同包括当前行驶车道相同以及目标行驶方向相同;目标行驶方向包括左转、直行和右转;
12、目标车辆集合内的车辆依次跟随前车,组成一个车队,直到每个车辆状态保持一致,即后车的车速调整到前车相同速度时二者车距大于等于后车所允许进入车队的最小安全距离才跟随前车组成一个车队。
13、可选的,所允许进入车队的最小安全距离δn的计算公式如下:
14、
15、式中,vn为第n辆车的速度,vn-1为第n-1辆车的速度,an为第n辆车的加速度,an-1为第n-1辆车的加速度,t为车速调整时间,ssafe为制动后车辆最小安全距离。
16、可选的,将车队作为一个整体,近似为一个矩形。
17、可选的,若直行车队和直行车队以及左转车队和左转车队存在发生碰撞的可能,则按照先来后到的原则控制首先到达所述可能的碰撞区域的车队优先通行,控制另一车队后通行;若两个车队同时到达所述可能的碰撞区域,则控制首先到达路口的车队优先通行,控制另一车队后通行;若两个车队同时到达路口,则选择其中一个车队优先通行,控制另一车队后通行;
18、若直行车队和左转车队存在发生碰撞的可能,则判断所述两个车队以当前速度通过路口时是否会发生碰撞;若是,则控制直行车队优先通行,控制左转车队后通行;若否,则按照先来后到的原则控制首先到达所述可能的碰撞区域的车队优先通行,控制另一车队后通行。
19、可选的,当直行车队和左转车队存在发生碰撞的可能时,计算路口到所述可能的碰撞区域的长度lr1:
20、
21、式中,ls为车队的车身宽度,lcrossing为路口中心距车辆停止线的距离,rleft为左转半径;
22、计算直行车队到达所述可能的碰撞区域的时间tfleet1:
23、
24、式中,l1为直行车队距离路口的长度,v1为直行车队的速度;
25、计算左转车队到达所述可能的碰撞区域的偏转角θfleet21:
26、
27、计算左转车队到达所述可能的碰撞区域的时间tfleet21
28、
29、式中,l2为左转车队距离路口的长度,v2为左转车队的速度;
30、计算直行车队离开所述可能的碰撞区域的时间tfleet1k:
31、
32、式中,lfleet1为直行车队的长度;
33、计算左转车队离开所述可能的碰撞区域的偏转角θfleet22:
34、
35、计算左转车队离开所述可能的碰撞区域的时间tfleet2k:
36、
37、式中,lfleet2为左转车队的长度;
38、假设直行车队先到达所述可能的碰撞区域,包括:
39、①当tfleet1≤tfleetw≤tfleet1k时,左转车队在直行车队未完全离开所述可能的碰撞区域时到达所述可能的碰撞区域,左转车队应在反应时间tre后匀减速并在tx2时刻到达路口,再匀速在tfleet1k时刻到达所述可能的碰撞区域:
40、
41、式中,a2为左转车队的加速度,v为到达路口时的速度;
42、每个路口都有最大转弯速度vmax;当v<vmax时,建议车速v=v;当v>vmax时,建议车速v=vmax;
43、②当tfleet1k≤tfleet2时,无碰撞危险。
44、可选的,当直行车队和直行车队存在发生碰撞的可能时,计算第一直行车队到达所述可能的碰撞区域的时间t′fleet1以及第一直行车队离开所述可能的碰撞区域的时间t′fleet1k;
45、计算第二直行车队到达所述可能的碰撞区域的时间tfleet31以及第二直行车队离开所述可能的碰撞区域的时间tfleet32;
46、①当t′fleet1≤tfleet31≤t′fleet1k时,第一直行车队先到达所述可能的碰撞区域,第二直行车队应在反应时间tre后匀减速到达路口,再匀速在t′fleet1k时刻以速度v′到达所述可能的碰撞区域;
47、每个路口都有最大转弯速度vmax;当v′<vmax时,建议车速v=v′;当v′>vmax时,建议车速v=vmax;
48、②当tfleet31≥t′fleet1k时,无碰撞危险。
49、可选的,当左转车队和左转车队存在发生碰撞的可能时,假设第一左转车队先到达所述可能的碰撞区域,第二直行车队应在反应时间tre后匀减速到达路口,再以速度v4c匀速到达所述可能的碰撞区域;
50、每个路口都有最大转弯速度vmsx;当v4x<vmax时,建议车速v=v4x;当v4x>vmax时,建议车速v=vmax。
51、第二方面,本发明还提供一种用于实现上述中任意一项所述的无信号灯路口的车辆调度方法的无信号灯路口的车辆调度系统,包括车端终端和智能路侧端;
52、车端终端设置于车辆上,包括定位模块和车载网联通信终端;
53、智能路侧端设置于无信号灯路口;
54、定位模块用于获取本车辆位置信息和行驶姿态信息,并发送给车载网联通信终端;车载网联通信终端用于本车辆和其他车辆以及智能路侧端进行信息交互。
55、可选的,车端终端还包括人机交互系统,车载网联通信终端将智能路侧端下发的车辆控制信息传送给人机交互系统,人机交互系统用于通过触觉、听觉或视觉的方式将车辆控制信息呈现给驾驶员或直接控制车辆。
56、本发明与现有技术相比,具有以下优点及有益效果:
57、本发明充分利用车路协同c-v2x技术进行车辆协同决策控制,让多个车辆进行协作式决策,合理规划执行方案通过无信号灯交叉路口,解决城镇、乡村无信号灯路口易拥堵、碰撞的问题。同时本方案通过以跟随模型为基础对车道上行驶的车辆进行编队控制,通过控制车队的方式对交通路口进行调度,保证了车辆在通过路口时的一致性,减少车辆与路侧频繁通信,解决了车辆在接收路侧发送的指令时因延时过长不能完成决策处理而发生碰撞的问题。
- 还没有人留言评论。精彩留言会获得点赞!