变电站运动物体靠近带电体的预警方法和装置与流程
本技术属于电力预警,尤其涉及变电站运动物体靠近带电体的预警方法和装置。
背景技术:
1、近年来随着经济的飞速发展,电网的规模也在不断的扩大。为了保障电网的安全稳定运行,经常需要在变电站中进行检修维护工作。由于变电站内的设备都是高压设备,当作业人员与作业车辆离高压设备距离过近时很容易引发触电风险。因此,对作业人员和作业车辆的预警变得尤为重要。
2、传统的作业人员和作业车辆的预警方法是基于双目相机实现的。具体的,在变电站内设置双目相机以采集变电站图像,然后对该图像进行处理来检测图像中的作业人员和作业车辆,实时计算作业人员和作业车辆与危险体之间的距离,来实现预警。
3、然而,上述方法中是采用双目相机实现的,而当双目相机设置在逆光的位置时逆光关线对相机成像影响较大,会导致对作业人员和作业车辆的检测识别的准确率大大降低,设置无法识别出作业人员和作业车辆。由此能够导致在计算作业人员和作业车辆与危险体之间的距离时出现较大偏差,而偏差较大时无法实现对作业人员和作业车辆的精准预警,使得变电站维修施工过程的安全性不能够得到有力保障。
技术实现思路
1、为克服相关技术中存在的问题,本技术实施例提供了变电站运动物体靠近带电体的预警方法和装置。
2、本技术是通过如下技术方案实现的:
3、第一方面,本技术实施例提供了一种变电站运动物体靠近带电体的预警方法,包括:
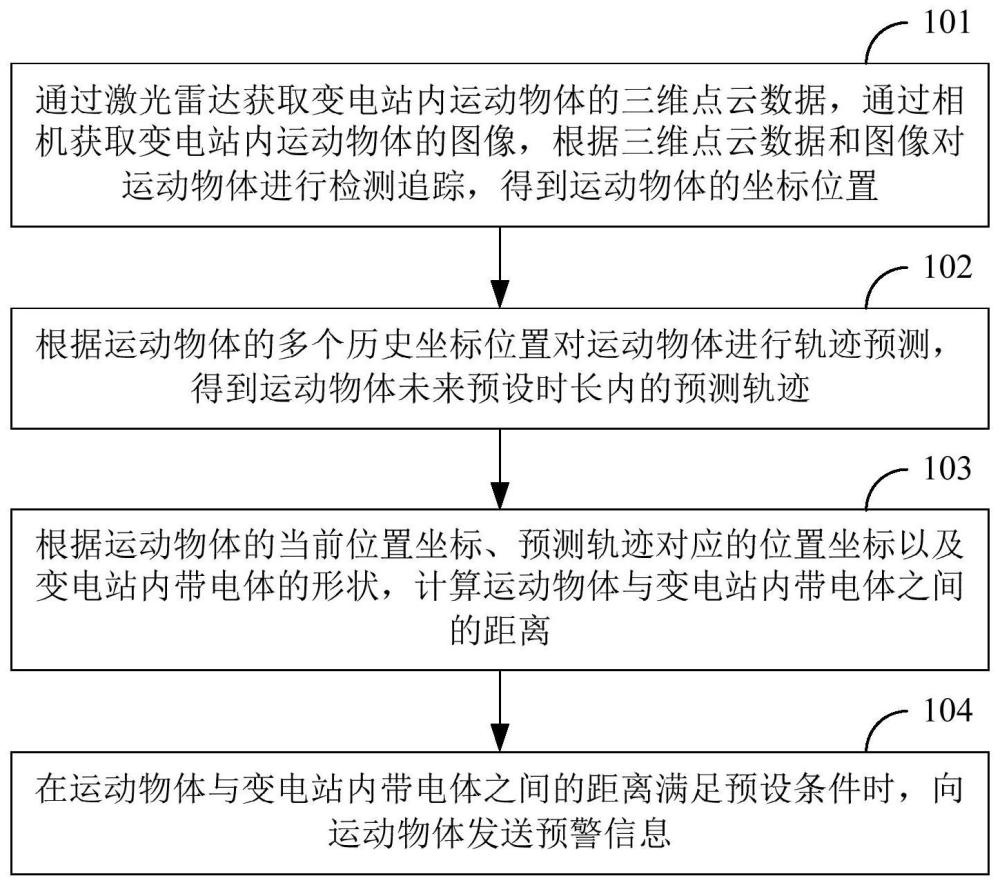
4、通过激光雷达获取变电站内运动物体的三维点云数据,通过相机获取变电站内运动物体的图像,根据所述三维点云数据和所述图像对运动物体进行检测追踪,得到所述运动物体的坐标位置;
5、根据所述运动物体的多个历史坐标位置和轨迹预测模型,对所述运动物体进行轨迹预测,得到运动物体未来预设时长内的预测轨迹;
6、根据所述运动物体的当前位置坐标、所述预测轨迹对应的位置坐标以及变电站内带电体的形状,计算所述运动物体与变电站内带电体之间的距离;
7、在所述运动物体与变电站内带电体之间的距离满足预设条件时,向所述运动物体发送预警信息。
8、结合第一方面,在一些实施例中,所述根据所述运动物体的当前位置坐标、所述预测轨迹对应的位置坐标以及变电站内带电体的形状,计算所述运动物体与变电站内带电体之间的距离,包括:
9、对于呈线段状的带电体,线段状的带电体的两端点分别为p1和p2,运动物体的位置坐标对应点p,p1、p2和p构成三角形;
10、计算∠pp1p2和∠pp2p1;
11、若∠pp1p2和∠pp2p1均大于等于零,则所述运动物体与变电站内带电体之间的距离为p到线段p1p2的垂直距离;
12、若∠pp1p2小于零,则所述运动物体与变电站内带电体之间的距离为线段pp1的长度;
13、若∠pp2p1小于零,则所述运动物体与变电站内带电体之间的距离为线段pp2的长度。
14、结合第一方面,在一些实施例中,所述根据所述运动物体的当前位置坐标、所述预测轨迹对应的位置坐标以及变电站内带电体的形状,计算所述运动物体与变电站内带电体之间的距离,包括:
15、对于呈圆柱或圆坛状的带电体,圆柱或圆坛状的带电体的外表面包括顶面、底面和侧面;
16、分别计算运动物体到所述顶面、所述底面和所述侧面最短距离;
17、将三个最短距离中的最小值作为所述运动物体与变电站内带电体之间的距离;
18、其中,计算运动物体到所述顶面、所述底面和所述侧面最短距离的过程包括:
19、对运动物体对应的空间中点p围绕着圆柱或圆坛的母线p1p2旋转α角度,使点p与平面p1p2p3p4处在一个平面上;其中α为点p到母线p1p2垂足m形成的直线pm与平面p1p2p3p4的夹角,p3和p4为母线p1p2所在的平面与圆柱或圆坛的侧面的上下两个交点;点p旋转α角度的坐标确定过程包括:求解点p在以p1p2形成的直线上的垂足m的坐标,计算直线pm与平面p1p2p3p4的夹角α,计算点p绕着p1p2旋转α后的坐标点;
20、计算点p到圆坛的上部分圆面的最短距离为计算点p到直线p1p3的最短距离,计算点p到圆坛的下部分圆面的最短距离为计算点p到直线p2p4的最短距离,计算点p到圆坛的侧面的最短距离为计算点p到直线p3p4的最短距离。
21、结合第一方面,在一些实施例中,所述根据所述运动物体的当前位置坐标、所述预测轨迹对应的位置坐标以及变电站内带电体的形状,计算所述运动物体与变电站内带电体之间的距离,包括:
22、对于呈多面体状的带电体,多面体状的带电体的外表面由多个平面构成,每个平面的各个边界均为一条直线;
23、对于所述多个平面中的每个平面,计算所述运动物体与该平面的垂直距离,以及所述运动物体与该平面的边界直线之间的距离;
24、将计算得出的各个距离中的最小值作为所述运动物体与该平面之间的距离;
25、将所述运动物体与各个平面之间的距离的最小值,作为所述运动物体与带电体之间的距离。
26、结合第一方面,在一些实施例中,所述根据所述三维点云数据和所述图像对运动物体进行检测追踪,得到所述运动物体的坐标位置,包括:
27、将所述三维点云数据映射到所述相机的坐标系下,得到映射点云数据;
28、确定所述映射点云数据中的各个点云与所述图像中各个像素点之间的对应关系;
29、基于所述对应关系,将所述三维点云数据和所述图像进行融合;
30、根据运动物体的特征从融合后得到的数据中确定运动物体的坐标位置。
31、结合第一方面,在一些实施例中,所述基于所述对应关系,将所述三维点云数据和所述图像进行融合,包括:
32、基于所述对应关系,计算相对应的点云的法向量和像素点的法向量之间的欧氏距离;
33、将欧式距离小于阈值的相对应的点云和像素点进行融合。
34、结合第一方面,在一些实施例中,所述根据运动物体的特征从融合后得到的数据中确定运动物体的坐标位置,包括:
35、根据运动物体的特征从融合后得到的数据中确定运动物体的轮廓;
36、将运动物体的轮廓对应的相机坐标系下的坐标转换为地球坐标系下的坐标,得到运动物体的坐标位置。
37、结合第一方面,在一些实施例中,所述向所述运动物体发送预警信息,包括:
38、获取所述运动物体的身份标识;
39、根据所述身份标识确定与所述运动物体对应的通信地址;
40、基于所述通信地址,向所述运动物体发送所述预警信息。
41、结合第一方面,在一些实施例中,每个运动物体上附着有唯一的身份标识装置,所述身份标识装置为由特定的反射材料制成的多个预设形状按照预设排布规则排布的装置,不同的运动物体对应的排布规则不同;
42、所述获取所述运动物体的身份标识,包括:
43、获取所述运动物体的三维点云数据中与所述身份标识装置对应的多个预设形状的排布信息;
44、根据所述排布信息确定所述运动物体的身份标识。
45、第二方面,本技术实施例提供了一种变电站运动物体靠近带电体的预警装置,包括:
46、检测追踪模块,用于通过激光雷达获取变电站内运动物体的三维点云数据,通过相机获取变电站内运动物体的图像,根据所述三维点云数据和所述图像对运动物体进行检测追踪,得到所述运动物体的坐标位置;
47、轨迹预测模块,用于根据所述运动物体的多个历史坐标位置对所述运动物体进行轨迹预测,得到运动物体未来预设时长内的预测轨迹;
48、距离计算模块,用于根据所述运动物体的当前位置坐标、所述预测轨迹对应的位置坐标以及变电站内带电体的形状,计算所述运动物体与变电站内带电体之间的距离;
49、预警模块,用于在所述运动物体与变电站内带电体之间的距离满足预设条件时,向所述运动物体发送预警信息。
50、本技术实施例与现有技术相比存在的有益效果是:
51、本技术实施例,对于变电站维修施工过程中的运动物体,获取运动物体的三维点云数据和图像,根据三维点云数据和图像对运动物体进行检测追踪得到运动物体的坐标位置。之后,根据运动物体的多个历史坐标位置对运动物体进行轨迹预测,得到运动物体未来预设时长内的预测轨迹。然后,根据运动物体的当前位置坐标、预测轨迹对应的位置坐标以及变电站内带电体的形状,计算运动物体与变电站内带电体之间的距离,即可以在该距离满足预设条件时,向运动物体发送预警信息,从而能够实现对变电站内各个运动物体的预警,既能够实现对高空作业的人员和车辆部分的预警,也能够实现对地面作业的人员和车辆的预警;而且在逆光情况下也能够准确检测到运动物体,增加预警的准确性,提高变电站维修施工过程的安全性。
52、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本说明书。
- 还没有人留言评论。精彩留言会获得点赞!