一种混行交通环境下信控交叉口多车协同控制方法及系统与流程
本发明涉及交叉口路多车协同,具体为一种混行交通环境下信控交叉口多车协同控制方法及系统。
背景技术:
1、近年来,随着汽车保有量的快速增长,城市中的交通拥堵、交通事故等一系列问题日益严重。交叉口作为城市交通的重要节点,受交通组成、位置、环境等各种因素影响,其通行效率和通行能力远远低于普通路段,交通事故率远高于其它路段,因此,科学合理的交通管控措施至关重要。智能网联和自动驾驶技术的快速发展,为解决交叉口问题提供了新的解决思路。通过搭载先进传感器等装置,运用v2x新型技术实现人、车、路、云之间的智能信息交互,对交叉口车辆实现轨迹与信息的协同优化。
2、我国车路协同技术虽已处于世界领先地位,但实现智能网联车辆(cav)完全代替人工驾驶车辆(hdv)还需要很长的一段时间,在此之前也必定会长期存在智能驾驶车辆与人工驾驶车辆混行的新型混合交通环境。
3、de nunzio g 等人通过剪枝算法设计多信号交叉口的速度引导模型,以车辆最小能耗为目标分析驾驶员建议最佳速度。zhou f 等人在纯网联环境下通过对信号交叉口上游车辆的引导控制,使其终端状态在信号交叉口停车线处保持最小车头时距,从而提升信号交叉口车辆安全效率。靳秋思考虑信号交叉口信号状态以及上游车辆的运行状态,并针对各情景建立了生态驾驶轨迹优化算法,并基于机动车比功率vsp模型选取最优的生态驾驶模型策略模型。郭毅涛基于对车辆通过车速引导区时间距离的研究,通过车路协同技术获取实时道路信息和车辆通行的时空轨迹做出预判,分析不同预判策略下的车速引导方法。remi t 等人提出以一种基于时隙控制的交叉口管理系统,实验结果表明该系统与交通信号系统相比进一步提高交叉口通行能力,降低车辆延误。liu w 等人通过自适应交通信号控制的阐述,提出集成 v2x 动态聚类的协同强化学习控制方法,并通过数值模拟从通行能力、吞吐量等方面验证该方法的有效性。orki o基于对混合交通车辆组队问题的考虑,开发了混合车队控制系统,并验证了系统控制下混行车队的稳定性和可行性。park c根据车速、时空位置、交通信号等信息,提出自动驾驶车辆行为驾驶决策算法,实验结果表明该算法可降低异质交通流下的车辆延误,提高交叉口的通行效率。张宇琳针对混合交通问题,搭建数字孪生分析模型分析交通流的安全性和稳定性。综上所述,现有研究对象主要是在纯网联环境下,因为人工驾驶车辆不可控,研究难度较大,故大多数学者在最终的理想条件下进行简化研究。但在这之前必将存在很长一段时间的混行情况,因此对该阶段的研究是必须的。对信号灯主动通信重视程度低,通过对信号灯信息获取及频率设置,减少通信过程中加载的数据量过大。由于cav智能化程度高,因此在,很多研究中信息的直接获取,计算机的程序设定都能较为简单地实现对某一车辆地控制,但这并不能说明对路网中整个系统地有效性
4、因此亟需一种混行交通环境下信控交叉口多车协同控制方法,可以通过v2v、v2x、v2p技术实时获取车辆、信号灯等信息,将信息进行整合,计算车辆能否通过交叉口,对于不能在当前信号周期通过交叉口的,进行速度引导,使车辆能够不停车衔接到下一绿灯周期内。
技术实现思路
1、鉴于上述存在的问题,提出了本发明。
2、因此,本发明解决的技术问题是:现有的交叉口多车协同控制方法存在混行交通状态下效果差,处理过程数据量大,缺少对油耗的把控,以及如何对路网中整个系统地有效控制的问题。
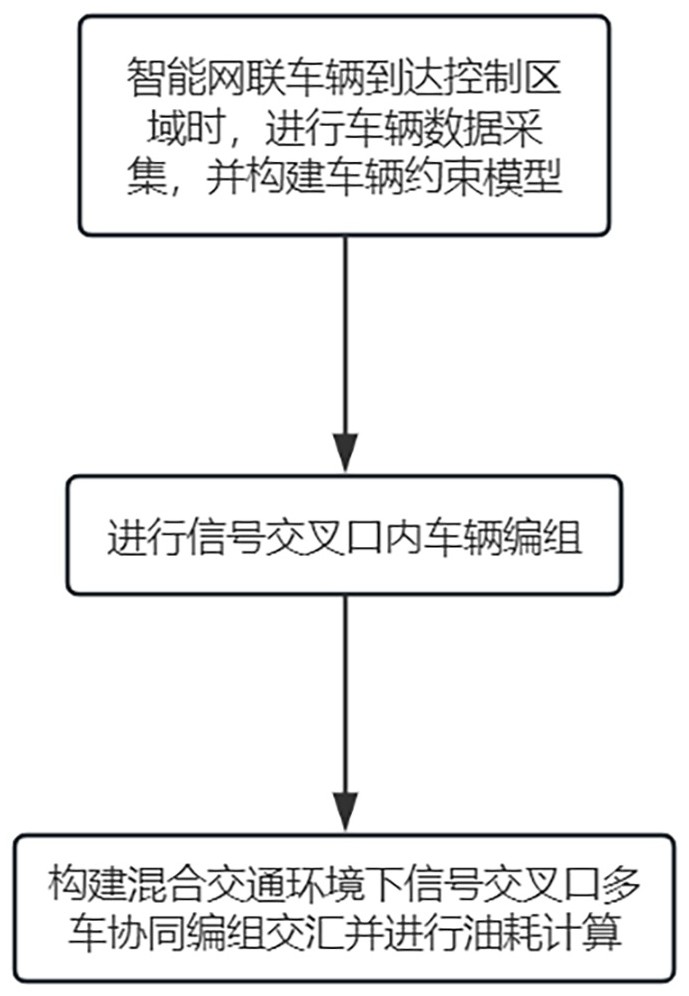
3、为解决上述技术问题,本发明提供如下技术方案:一种混行交通环境下信控交叉口多车协同控制方法,包括智能网联车辆到达控制区域时,进行车辆数据采集,并构建车辆约束模型;进行信号交叉口内车辆编组;构建混合交通环境下信号交叉口多车协同编组交汇并进行油耗计算。
4、作为本发明所述的混行交通环境下信控交叉口多车协同控制方法的一种优选方案,其中:所述进行车辆数据采集包括智能网联车辆到达控制区域时,获取车辆位置、速度、加速度信息以及交叉口信号灯信息,每一辆车对应的状态信息为;其中,为车辆编号,为第个车组,为第车组中第辆车距离停止线的距离,为第车组中第辆车的速度,为第车组中第辆车的加速度,为第车组中第辆车的所处信号灯的时刻。
5、作为本发明所述的混行交通环境下信控交叉口多车协同控制方法的一种优选方案,其中:所述构建车辆约束模型表示为:
6、 ;
7、其中,、及分别表示车辆在时刻的距离停止线的距离、速度及加速度。
8、作为本发明所述的混行交通环境下信控交叉口多车协同控制方法的一种优选方案,其中:所述信号交叉口内车辆编组包括交叉口车辆进入路网时,获取到达控制区域内的车辆信息,判断车辆类型,若车辆是cav,则视为可进行控制,作为编组头车,若车辆是hdv,则视为不可控,跟驰cav行驶,判断cav后是否有hdv跟驰,若有则车组内的车辆数增加,直至达到信号灯可容许周期通过的车辆数。
9、作为本发明所述的混行交通环境下信控交叉口多车协同控制方法的一种优选方案,其中:所述构建混合交通环境下信号交叉口多车协同编组交汇包括计算车辆引导速度,当车辆匀速行驶到达停止线,第车组中cav匀速行驶时到达停止线的时间表示为:
10、 ;
11、其中,为第车组中cav进入控制区域的初始速度;当车辆先加速再匀速到达停止线,第车组中cav先加速再匀速行驶到达停止线的时间表示为:
12、;
13、其中,为路网中车辆的最大速度,为路网中车辆的最大加速度;判断头车cav到达停止线时信号灯状态是否为绿灯,表示为:
14、 ;
15、其中,为信号灯所处的周期内时刻,为交通信号灯周期;当车组头车cav匀速行驶时,且到达停止线时刻在绿灯周期内,且车辆前方未有车辆对行驶状态造成干扰,则此时已确定头车能够安全驶过交叉口,当车组头车cav匀速行驶时,且到达停止线时刻在红灯周期内,此时存在速度引导后能顺利通过当前信号灯周期情况以及不能通过当前信号灯周期情况,对车辆进行速度引导,cav从控制区域起点到停止线花费的时间表示为:
16、 ;
17、其中,g表示信号灯周期内绿灯结束时刻,当时,则cav可以加速通过交叉口,赋予车辆引导速度为,当时,则cav不能通过交叉口,计算车辆在下一环节绿灯亮起时到达停止线的引导速度,cav从进入控制区域开始到下一周期绿灯开始的时间间隔表示为:
18、 ;
19、其中,为控制区域起点到达停止线的距离,为车辆匀减速所需要的时间,为车辆以引导速度行驶所需要的时间,引导速度表示为:
20、 ;
21、完成对cav的控制后,对车组中hdv的可通过的车辆数进行计算。
22、作为本发明所述的混行交通环境下信控交叉口多车协同控制方法的一种优选方案,其中:所述对车组中hdv的可通过的车辆数进行计算表示为:
23、 ;
24、其中,为信号灯周期所剩余的时间,为车辆长度,为相邻辆车辆之间的安全距离。
25、作为本发明所述的混行交通环境下信控交叉口多车协同控制方法的一种优选方案,其中:所述油耗计算包括通过分析车辆的比功率vsp计算车辆排放,表示为:
26、 ;
27、其中,为车辆速度,为车辆加速度。
28、本发明的另外一个目的是提供一种混行交通环境下信控交叉口多车协同控制系统,其能通过改善cav速度,从而引导跟驰的hdv,在某一信号周期内能够尽可能多地通过车辆数。解决了目前的交叉口多车协同控制仅能简单地实现对某一车辆地控制,无法进行复杂的多车辆控制问题。
29、作为本发明所述的混行交通环境下信控交叉口多车协同控制系统的一种优选方案,其中:包括车辆信息采集模块,车辆编组模块,交汇控制模块,油耗计算模块;所述车辆信息采集模块在智能网联车辆到达控制区域时,进行车辆数据采集,并构建车辆约束模型;所述车辆编组模块根据车辆类型进行编组,指定头车和跟行车辆;所述交汇控制模块用于构建混合交通环境下信号交叉口多车协同编组交汇;所述油耗计算模块通过分析车辆的比功率vsp计算车辆排放。
30、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序是实现混行交通环境下信控交叉口多车协同控制方法的步骤。
31、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现混行交通环境下信控交叉口多车协同控制方法的步骤。
32、本发明的有益效果:本发明提供的混行交通环境下信控交叉口多车协同控制方法通过改善cav速度,从而引导跟驰的hdv,在某一信号周期内能够尽可能多地通过车辆数。若是车辆在该当前信号周期内加速到最大速度也不能通过信号交叉口,则此时对cav进行速度引导,该前状态下车辆是匀减速状态,此时后方跟驰的hdv也将减速,目的在下一信号周期绿灯刚亮起时车辆能够不停车通过信号交叉口,可以降低车辆的油耗,提高舒适性与生态性。本发明在控制车辆数量、引导效果以及减少油耗方面都取得更加良好的效果。
- 还没有人留言评论。精彩留言会获得点赞!