考虑驾驶风格的合流区车辆交互碰撞风险预测方法及系统
本发明涉及交通安全,具体为考虑驾驶风格的合流区车辆交互碰撞风险预测方法及系统。
背景技术:
1、快速路合流区交通拥堵经常发生,此区域主线车辆与匝道车辆交互频繁,驾驶员为处理复杂的道路交通环境而不得不连续进行加减速及换道操作,因此快速路合流区发生交通事故风险较高。
2、国内现有针对快速路合流区的安全风险预测方法,一般从多集计角度去分析宏观交通参数与交通冲突的关系,而较少从驾驶员角度研究对交互风险的影响,较少关注考虑驾驶风格的车辆交互碰撞风险预测,由于驾驶员是车辆安全合流的重要影响因素,因此现有针对快速路合流区的风险预测方法准确率低,容易造成合流区车辆碰撞。
技术实现思路
1、本发明的目的是:针对现有技术中针对快速路合流区的风险预测方法准确率低,容易造成合流区车辆碰撞的问题,提出考虑驾驶风格的合流区车辆交互碰撞风险预测方法及系统。
2、本发明为了解决上述技术问题采取的技术方案是:
3、考虑驾驶风格的合流区车辆交互碰撞风险预测方法,包括以下步骤:
4、步骤一:获取快速路合流区监控视频数据,并基于快速路合流区监控视频数据,提取目标车辆的加速度;
5、步骤二:将目标车辆的加速度取绝对值,之后,基于目标车辆加速度的绝对值,并通过k-means算法,判断目标车辆驾驶员的驾驶风格,所述驾驶风格包括激进型、一般型和谨慎型;
6、步骤三:将合流交互过程起始时刻定义为目标车辆进入外侧车道时刻,将终点时刻定义为目标车辆左前角到达目标车道的车道线时刻,之后,采用hdp-hsmm方法将快速路合流区划分为多个交互片段,每个交互片段中包括目标车辆、目标车道前车以及目标车道后车,之后获取每个交互片段中多帧的合流交互特征指标,所述合流交互特征指标包括目标车辆与前车车头时距dm-l、目标车辆与前车车头时距变化率dm-l'、目标车辆与前车速度差δvm-l、目标车辆与后车车头时距df-m、目标车辆与后车车头时距变化率df-m'、目标车辆与后车速度差δvf-m,之后,基于多帧的合流交互特征指标,并利用k-means算法对多帧的合流交互特征指标进行聚类,聚类中心点对应的合流交互特征指标,即为该交互片段的最终合流交互特征指标;
7、步骤四:利用交互片段的最终合流交互特征指标分别对目标车道前车和目标车道后车进行语义空间划分,所述语义空间表示为:[短时距/中时距/长时距、时距渐大/时距稳定/时距渐小、小速差/中速差/大速差],之后,利用步骤二,得到交互片段中目标车辆驾驶员的驾驶风格,并根据交互片段中目标车辆驾驶员的驾驶风格以及该交互片段对应的目标车道前车语义空间得到该交互片段中目标车辆与目标车道前车的风险值,之后根据交互片段中目标车辆驾驶员的驾驶风格以及该交互片段对应的目标车道后车语义空间得到该交互片段中目标车辆与目标车道后车的风险值,最后将该交互片段中目标车辆与目标车道前车的风险值与该交互片段中目标车辆与目标车道后车的风险值取平均值,该平均值即为该交互片段的风险值,重复上述步骤,进而得到快速路合流区中每个交互片段的风险值,之后将快速路合流区中所有交互片段的风险值取均值后作为快速路合流区的风险值;
8、步骤五:将交互过程终点作为碰撞风险的预测时刻,之后将预测时刻、驾驶风格、快速路合流区的风险值输入adaboost,得到预测结果,所述预测结果包括低风险和高风险。
9、进一步的,所述步骤二的具体步骤为:
10、步骤二一:将目标车辆的加速度取绝对值,并利用目标车辆的加速度绝对值作为特征值|ax,t|,
11、步骤二二:获取每个目标车辆的特征值|ax,t|,并随机选择3个特征值分别作为簇的中心值;
12、步骤二三:将每个目标车辆划入离其最近的簇中;
13、步骤二四:基于步骤二三划分后的簇,更新中心值,当中心值不再随迭代而变时,完成聚类过程,将驾驶风格划分为三类,即激进型、一般型和谨慎型;
14、将驾驶风格划分为三类具体为:
15、分别获取每个簇中目标车辆加速度绝对值的平均值,选取平均值最大的簇,该簇中目标车辆驾驶员的驾驶风格属于激进型;
16、选取平均值最小的簇,该簇中目标车辆驾驶员的驾驶风格属于谨慎型;
17、不属于激进型和谨慎型的,则为一般型。
18、进一步的,所述步骤四的具体步骤为:
19、步骤四一:将车头时距划分为短时距、中时距以及长时距,并对短时距、中时距以及长时距分别设定阈值范围;
20、步骤四二:将车头时距变化率划分为时距渐小、时距稳定以及时距渐大,并对时距渐小、时距稳定以及时距渐大分别设定阈值范围;
21、步骤四三:将速度差划分为小速差、中速差以及大速差,并对小速差、中速差以及大速差分别设定阈值范围;
22、步骤四四:获取最终合流交互特征指标中目标车辆与前车车头时距dm-l的值、目标车辆与前车车头时距变化率dm-l'的值、目标车辆与前车速度差δvm-l的值、目标车辆与后车车头时距df-m的值、目标车辆与后车车头时距变化率df-m'的值以及目标车辆与后车速度差δvf-m的值;
23、步骤四五:将步骤四四中得到的目标车辆与前车车头时距dm-l的值与步骤四一中设定的阈值范围进行比较,得到语义空间中车头时距为短时距、中时距或长时距;
24、将步骤四四中得到的目标车辆与前车车头时距变化率dm-l'的值与步骤四二中设定的阈值范围进行比较,得到语义空间中车头时距变化率为时距渐大、时距稳定或时距渐小;
25、将步骤四四中得到的目标车辆与前车速度差δvm-l的值与步骤四三中设定的阈值范围进行比较,得到语义空间中速度差为小速差、中速差或大速差;
26、基于上述语义空间中车头时距、语义空间中车头时距变化率以及语义空间中速度差,得到目标车道前车的语义空间;
27、步骤四六:将步骤四四中得到的目标车辆与后车车头时距df-m的值与步骤四一中设定的阈值范围进行比较,得到语义空间中车头时距为短时距、中时距或长时距;
28、将步骤四四中得到的目标车辆与后车车头时距变化率df-m'的值与步骤四二中设定的阈值范围进行比较,得到语义空间中车头时距变化率为时距渐大、时距稳定或时距渐小;
29、将步骤四四中得到的目标车辆与后车速度差δvf-m的值与步骤四三中设定的阈值范围进行比较,得到语义空间中速度差为小速差、中速差或大速差;
30、基于上述语义空间中车头时距、语义空间中车头时距变化率以及语义空间中速度差,得到目标车道后车的语义空间;
31、步骤四七:针对每种驾驶风格对应的所有语义空间,分别预设风险值,以此构建对应驾驶风格的语义空间库;
32、步骤四八:利用步骤二,得到交互片段中目标车辆驾驶员的驾驶风格,并基于该驾驶风格,调取对应驾驶风格的语义空间库;
33、步骤四九:将目标车道前车的语义空间和目标车道后车的语义空间分别与语义空间库中的语义空间进行匹配,进而得到目标车道前车语义空间的风险值和目标车道后车语义空间的风险值;
34、步骤四一零:将步骤四九中得到的目标车道前车语义空间的风险值和目标车道后车语义空间的风险值取平均值,该平均值即为该交互片段的风险值;
35、步骤四一一:重复步骤四一至步骤四一零,进而得到快速路合流区中每个交互片段的风险值;
36、步骤四一二:将快速路合流区中所有交互片段的风险值取均值后作为快速路合流区的风险值。
37、进一步的,所述目标车辆的加速度表示为:
38、
39、其中,ax,t表示车辆在第t帧的瞬时加速度,即目标车辆的加速度,δt表示每帧之间的时间间隔,vx,t+δt表示目标车辆在第t+δt帧的速度,vx,t-δt表示目标车辆在第t-δt帧的速度。
40、进一步的,所述目标车辆与前车车头时距dm-l、目标车辆与后车车头时距df-m、目标车辆与前车车头时距变化率dm-l'、目标车辆与后车车头时距变化率df-m'、目标车辆与前车速度差δvm-l以及目标车辆与后车速度差δvf-m分别表示为:
41、
42、
43、
44、
45、δvm-l=vm-vl
46、δvf-m=vf-vm
47、其中,xl、xm、xf表示目标车道前车、目标车辆和目标车道后车的纵向位置,vl、vm、vf表示目标车道前车、目标车辆和目标车道后车的纵向速度,dt表示时间间隔。
48、进一步的,所述k-means算法表示为:
49、
50、其中,min t表示簇内样本距离所属簇中心的距离平方和最小值,m表示聚类数目,m=3,n表示第i个簇中的数据点数量,μi表示聚类中心。
51、进一步的,所述快速路合流区的风险值表示为:
52、
53、其中,scorek表示第k个驾驶片段的风险值,p表示驾驶片段数量。
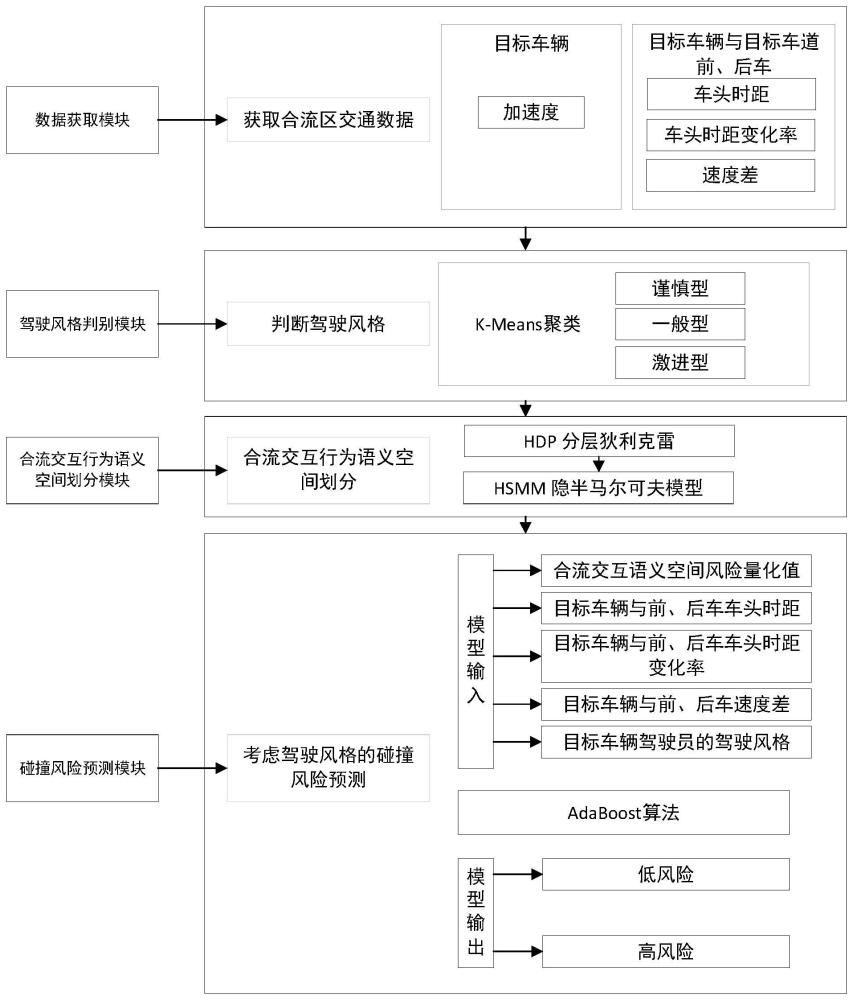
54、考虑驾驶风格的合流区车辆交互碰撞风险预测系统,包括数据获取模块、驾驶风格判别模块、合流交互行为语义空间划分模块以及碰撞风险预测模块;
55、所述数据获取模块用于获取快速路合流区监控视频数据,并基于快速路合流区监控视频数据,提取目标车辆的加速度;
56、所述驾驶风格判别模块用于将目标车辆的加速度取绝对值,之后,基于目标车辆加速度的绝对值,并通过k-means算法,判断目标车辆驾驶员的驾驶风格,所述驾驶风格包括激进型、一般型和谨慎型;
57、所述合流交互行为语义空间划分模块用于将合流交互过程起始时刻定义为目标车辆进入外侧车道时刻,将终点时刻定义为目标车辆左前角到达目标车道的车道线时刻,之后,采用hdp-hsmm方法将快速路合流区划分为多个交互片段,每个交互片段中包括目标车辆、目标车道前车以及目标车道后车,之后获取每个交互片段中多帧的合流交互特征指标,所述合流交互特征指标包括目标车辆与前车车头时距dm-l、目标车辆与前车车头时距变化率dm-l'、目标车辆与前车速度差δvm-l、目标车辆与后车车头时距df-m、目标车辆与后车车头时距变化率df-m'、目标车辆与后车速度差δvf-m,之后,基于多帧的合流交互特征指标,并利用k-means算法对多帧的合流交互特征指标进行聚类,聚类中心点对应的合流交互特征指标,即为该交互片段的最终合流交互特征指标,之后利用交互片段的最终合流交互特征指标分别对目标车道前车和目标车道后车进行语义空间划分,所述语义空间表示为:[短时距/中时距/长时距、时距渐大/时距稳定/时距渐小、小速差/中速差/大速差];
58、所述碰撞风险预测模块用于利用驾驶风格判别模块,得到交互片段中目标车辆驾驶员的驾驶风格,并根据交互片段中目标车辆驾驶员的驾驶风格以及该交互片段对应的目标车道前车语义空间得到该交互片段中目标车辆与目标车道前车的风险值,之后根据交互片段中目标车辆驾驶员的驾驶风格以及该交互片段对应的目标车道后车语义空间得到该交互片段中目标车辆与目标车道后车的风险值,最后将该交互片段中目标车辆与目标车道前车的风险值与该交互片段中目标车辆与目标车道后车的风险值取平均值,该平均值即为该交互片段的风险值,重复上述步骤,进而得到快速路合流区中每个交互片段的风险值,之后将快速路合流区中所有交互片段的风险值取均值后作为快速路合流区的风险值,之后将交互过程终点作为碰撞风险的预测时刻,将预测时刻、驾驶风格、快速路合流区的风险值输入adaboost,得到预测结果,所述预测结果包括低风险和高风险。
59、进一步的,所述驾驶风格判别模块具体执行如下步骤:
60、步骤11:将目标车辆的加速度取绝对值,并利用目标车辆的加速度绝对值作为特征值|ax,t|,
61、步骤12:获取每个目标车辆的特征值|ax,t|,并随机选择3个特征值分别作为簇的中心值;
62、步骤13:将每个目标车辆划入离其最近的簇中;
63、步骤14:基于步骤13划分后的簇,更新中心值,当中心值不再随迭代而变时,完成聚类过程,将驾驶风格划分为三类,即激进型、一般型和谨慎型;
64、将驾驶风格划分为三类具体为:
65、分别获取每个簇中目标车辆加速度绝对值的平均值,选取平均值最大的簇,该簇中目标车辆驾驶员的驾驶风格属于激进型;
66、选取平均值最小的簇,该簇中目标车辆驾驶员的驾驶风格属于谨慎型;
67、不属于激进型和谨慎型的,则为一般型;
68、得到快速路合流区中每个交互片段的风险值,之后将快速路合流区中所有交互片段的风险值取均值后作为快速路合流区的风险值的具体步骤为:
69、步骤21:将车头时距划分为短时距、中时距以及长时距,并对短时距、中时距以及长时距分别设定阈值范围;
70、步骤22:将车头时距变化率划分为时距渐小、时距稳定以及时距渐大,并对时距渐小、时距稳定以及时距渐大分别设定阈值范围;
71、步骤23:将速度差划分为小速差、中速差以及大速差,并对小速差、中速差以及大速差分别设定阈值范围;
72、步骤24:获取最终合流交互特征指标中目标车辆与前车车头时距dm-l的值、目标车辆与前车车头时距变化率dm-l'的值、目标车辆与前车速度差δvm-l的值、目标车辆与后车车头时距df-m的值、目标车辆与后车车头时距变化率df-m'的值以及目标车辆与后车速度差δvf-m的值;
73、步骤25:将步骤24中得到的目标车辆与前车车头时距dm-l的值与步骤21中设定的阈值范围进行比较,得到语义空间中车头时距为短时距、中时距或长时距;
74、将步骤24中得到的目标车辆与前车车头时距变化率dm-l'的值与步骤22中设定的阈值范围进行比较,得到语义空间中车头时距变化率为时距渐大、时距稳定或时距渐小;
75、将步骤24中得到的目标车辆与前车速度差δvm-l的值与步骤23中设定的阈值范围进行比较,得到语义空间中速度差为小速差、中速差或大速差;
76、基于上述语义空间中车头时距、语义空间中车头时距变化率以及语义空间中速度差,得到目标车道前车的语义空间;
77、步骤26:将步骤24中得到的目标车辆与后车车头时距df-m的值与步骤21中设定的阈值范围进行比较,得到语义空间中车头时距为短时距、中时距或长时距;
78、将步骤24中得到的目标车辆与后车车头时距变化率df-m'的值与步骤22中设定的阈值范围进行比较,得到语义空间中车头时距变化率为时距渐大、时距稳定或时距渐小;
79、将步骤24中得到的目标车辆与后车速度差δvf-m的值与步骤23中设定的阈值范围进行比较,得到语义空间中速度差为小速差、中速差或大速差;
80、基于上述语义空间中车头时距、语义空间中车头时距变化率以及语义空间中速度差,得到目标车道后车的语义空间;
81、步骤27:针对每种驾驶风格对应的所有语义空间,分别预设风险值,以此构建对应驾驶风格的语义空间库;
82、步骤28:利用驾驶风格判别模块,得到交互片段中目标车辆驾驶员的驾驶风格,并基于该驾驶风格,调取对应驾驶风格的语义空间库;
83、步骤29:将目标车道前车的语义空间和目标车道后车的语义空间分别与语义空间库中的语义空间进行匹配,进而得到目标车道前车语义空间的风险值和目标车道后车语义空间的风险值;
84、步骤210:将步骤29中得到的目标车道前车语义空间的风险值和目标车道后车语义空间的风险值取平均值,该平均值即为该交互片段的风险值;
85、步骤211:重复步骤21至步骤210,进而得到快速路合流区中每个交互片段的风险值;
86、步骤212:将快速路合流区中所有交互片段的风险值取均值后作为快速路合流区的风险值。
87、进一步的,所述目标车辆的加速度表示为:
88、
89、其中,ax,t表示车辆在第t帧的瞬时加速度,即目标车辆的加速度,δt表示每帧之间的时间间隔,vx,t+δt表示目标车辆在第t+δt帧的速度,vx,t-δt表示目标车辆在第t-δt帧的速度;
90、所述目标车辆与前车车头时距dm-l、目标车辆与后车车头时距df-m、目标车辆与前车车头时距变化率dm-l'、目标车辆与后车车头时距变化率df-m'、目标车辆与前车速度差δvm-l以及目标车辆与后车速度差δvf-m分别表示为:
91、
92、
93、
94、
95、δvm-l=vm-vl
96、δvf-m=vf-vm
97、其中,xl、xm、xf表示目标车道前车、目标车辆和目标车道后车的纵向位置,vl、vm、vf表示目标车道前车、目标车辆和目标车道后车的纵向速度,dt表示时间间隔;
98、所述k-means算法表示为:
99、
100、其中,min t表示簇内样本距离所属簇中心的距离平方和最小值,m表示聚类数目,m=3,n表示第i个簇中的数据点数量,μi表示聚类中心;
101、所述快速路合流区的风险值表示为:
102、
103、其中,scorek表示第k个驾驶片段的风险值,p表示驾驶片段数量。
104、本发明的有益效果是:
105、本技术从动态交通参数及合流交互时序特征的角度出发,并结合驾驶员的驾驶风格对合流前车辆交互过程的风险进行量化,提高了快速路合流区的风险预测准确率,进而降低了快速路合流区发生交通事故的概率,提高车辆的通行效率。
106、本技术考虑合流交互过程中目标车辆与前后车的车头时距、与前后车时距变化率、与前后车速度差和驾驶员的驾驶风格。数据获取模块、驾驶风格判别模块、合流交互行为语义空间划分模块和碰撞风险预测模块协调运作。根据合流车驾驶员的驾驶风格和车头时距、车头时距变化率、速度差等指标描述合流交互过程合流车辆与目标车道前后车的交互特性,预测合流执行过程中的碰撞风险。
107、本技术对合流交互时序数据进行片段划分,结合驾驶员的驾驶风格,通过设定合流交互语义空间风险值,量化快速路合流区交互风险,预测合流执行过程的碰撞风险,模型预测效果较好,该方法与系统可应用于我国快速路合流区车辆交互安全性预测。
- 还没有人留言评论。精彩留言会获得点赞!