读取器不稳定检测和恢复的制作方法
读取器不稳定检测和恢复
技术实现要素:
1.在一个实施方案中,提供一种方法。所述方法包含在读取传感器从数据存储介质上的第一磁道读取数据的第一读取操作期间检测读取错误。所述方法还包含在检测到所述读取错误之后,由所述读取传感器在所述第一磁道上执行第二读取操作,针对所述第二读取操作进行误码值测量,并且根据所述误码值测量确定所述读取传感器是否产生边际误码值。所述边际误码值介于第一预定误码值阈值与第二预定误码值阈值之间。所述方法进一步包含响应于确定所述读取传感器产生所述边际误码值,由所述读取传感器在所述第一磁道上进行第三读取操作,并且针对所述第三读取操作进行误码值测量。当来自所述第二读取操作和所述第三读取操作的误码值测量满足至少一个预定读取传感器不稳定准则时,推断所述读取传感器不稳定。
2.在另一实施方案中,提供一种设备。所述设备包含:控制器;以及读取通道,其以通信方式耦合到所述控制器。所述读取通道包含读取器不稳定检测电路。所述设备还包含:前置放大器,其以通信方式耦合到所述读取通道;以及磁头,其以通信方式耦合到所述前置放大器。所述磁头包含至少一个读取传感器。所述读取器不稳定检测电路被配置成通过评估所述读取传感器是否在与所述前置放大器、所述读取通道和所述控制器通信的所述读取传感器所进行的一个或多个读取操作期间产生边际误码值或更差来确定所述读取传感器是否不稳定。所述边际误码值介于第一预定误码值阈值与第二预定误码值阈值之间。
3.在又一实施方案中,提供一种方法。所述方法包含在读取传感器从数据存储介质上的第一磁道读取数据的第一读取操作期间检测读取错误。所述方法还包含在检测到所述读取错误之后,通过评估所述读取传感器是否在一个或多个后续读取操作期间表现得边际或更差来确定所述读取传感器是否不稳定。边际读取传感器性能是通过将来自所述读取传感器的至少一个读回值与一个或多个边际性能指示阈值进行比较来确定的。所述方法进一步包含响应于确定所述读取传感器表现得边际或更差而推断所述读取传感器是不稳定的。
4.在阅读以下详细描述并查看相关联图式后,表征所公开的方面的其它特征和益处将显而易见。
附图说明
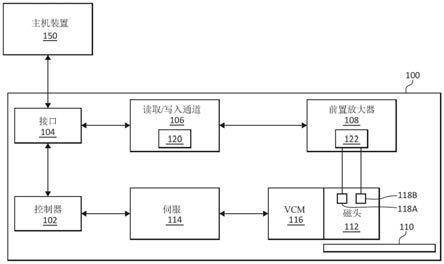
5.图1是根据一个实施方案的数据存储装置的简化框图。
6.图2是可包含在图1的数据存储装置中的数据存储盘的简化俯视图的图示。
7.图3是根据一个实施方案的可以恢复被发现不稳定的读取传感器的方法的流程图。
8.图4a是根据一个实施方案的确定单读取器磁头内的读取传感器是否不稳定的方法的流程图。
9.图4b是根据一个实施方案的确定多读取器磁头内的一个或多个读取传感器是否不稳定的方法的流程图。
10.图5a是误码率分布图表。
11.图5b是包含扇区误码率值的曲线图的图表。
12.图5c是示出从同一磁道上的不同读取操作获得的误码率值的差的图表。
具体实施方式
13.下文所描述的实施方案涉及例如硬盘驱动器(hdd)和混合驱动器等数据存储装置中的读取器不稳定检测和恢复。在提供关于读取器不稳定和恢复的细节之前,下文提供对说明性操作环境的描述。
14.图1示出了可并入有本文中所公开的某些实施方案的说明性操作环境。图1所示的操作环境仅用于说明的目的。本公开的实施方案不限于任何特定操作环境,例如图1所示的操作环境。本公开的实施方案说明性地在任何数量的不同类型的操作环境内实践。
15.应注意,在不同附图中为相同或相似元件使用相同附图标记。还应当理解,本文所用的术语是出于描述实施方案的目的,并且术语不旨在是限制性的。除非另有说明,否则顺序数字(例如,第一、第二、第三等)用于区分或标识一组元件或步骤中的不同元件或步骤,并且不对其实施方案的元件或步骤提供顺序或数值限制。例如,“第一”、“第二”和“第三”元件或步骤未必以所述顺序出现,并且其实施方案未必限于三个元件或步骤。还应当理解,除非另有说明,否则诸如“左”、“右”、“前”、“后”、“顶”、“底”、“正向”、“反向”、“顺时针”、“逆时针”、“向上”、“向下”的任何标志,或诸如“上”、“下”、“后”、“前”、“垂直”、“水平”、“近”、“远”、“中”等其它类似术语是为了方便而用,并非意在例如暗示任何特定的固定位置、取向或方向。相反,此类标记用于反映例如相对位置、取向或方向。还应当理解,单数形式“一”和“所述”包含复数引用,除非上下文明确做出其它表述。
16.应理解,当元件被称为“连接”、“耦合”或“附接”到另一元件时,其可以直接连接、耦合或附接到另一元件,或者可以在存在介入或中间元件的情况下间接地连接、耦合或附接到另一元件。相比之下,如果元件被称为“直接连接”、“直接耦合”或“直接附接”到另一元件时,则不存在介入元件。示出元件之间的直接连接、耦合或附接的图式还包含元件彼此间接地连接、耦合或附接的实施方案。
17.现在参考图1,示出了数据存储装置(例如,hdd或混合驱动器)100的示例实施方案,在所述数据存储装置中,可以进行读取器不稳定检测和恢复。数据存储装置100包含引导或管理装置100的高级操作的处理器或控制器102。接口电路104促进装置100与主机装置150之间的通信。读取/写入通道106结合前置放大器/驱动器电路108进行操作以将数据写入到数据存储介质(例如,数据存储盘)110以及从所述数据存储介质读取数据。前置放大器108还充当包含在记录磁头中的例如读取换能器、写入换能器、加热器等电部件的电源。前置放大器108通过磁头折片组件(hga)电路(未示出)说明性地电连接到记录磁头112,所述磁头折片组件连接到前置放大器108以及一个或多个记录磁头112的电连接点。伺服电路114为音圈电机(vcm)116提供闭环位置控制,所述音圈电机将记录磁头112定位在数据存储介质110上的期望位置。
18.在一些实施方案中,记录磁头112可以包含单个读取器或读取传感器(例如,单个磁阻(mr)传感器)118a。在其它实施方案中,记录磁头112可以包含多个读取器或读取传感器(例如,多个mr传感器)118a、118b等。应注意,在一些实施方案中,磁头112可以不包含任何写入元件,并且可以包含一个或多个读取传感器118a、118b。在此类实施方案中,磁头112
是读磁头。如本文中所使用,术语磁头用于可以包含读取元件和写入元件或者仅包含读取元件而不包含写入元件的滑块。为了简明起见,本文中未提供关于mr传感器118a、118b结构和操作的细节。当使用mr传感器(例如,118a、118b)时,“磁头不稳定”是mr传感器畴进入不稳定状态的现象。mr传感器118a、118b可以在数据存储装置100的寿命期间的任何时间进入这种状态。
19.图1的实施方案采用读取/写入通道106中的读取器不稳定检测电路120来检测读取传感器118a、118b的不稳定。读取器不稳定检测电路120可以包含被配置成以下文进一步描述的方式进行读取器不稳定检测的硬件和/或固件。应注意,一个或两个读取传感器118a、118b可能在不同时间变得不稳定。一旦确定读取传感器118a、118b不稳定,数据存储装置100就采用前置放大器108中的读取器恢复电路122以将合适的冲击信号施加到读取传感器118a、118b,从而实现恢复。在一些实施方案中,读取器恢复电路122可以包含复位脉冲产生电路系统(例如,被配置成提供偏置冲击的电流和/或电压电路系统),所述复位脉冲产生电路系统生成偏置冲击电流,以例如在相同的方向上布置在mr传感器118a、118b的易轴上不稳定的畴。应注意,复位脉冲不同于前置放大器108向mr传感器118a、118b供应的读取器偏置电流,使得驱动器响应于记录在数据存储介质(例如,磁性数据存储盘)110上的磁性信息而使用电流(或电压)来感测mr传感器118a、118b的电阻值变化。
20.应注意,在一些实施方案中,数据存储装置100可以包含例如可用于磁头-介质间隔(hms)控制的磁头加热电路系统(未图示)。在某些实施方案中,当发现一个或两个mr传感器118a、118b不稳定时,磁头加热电路可以(例如使用高热功率)将热冲击施加到磁头112以恢复mr传感器118a、118b。在一些实施方案中,磁头加热电路系统可以是前置放大器108的电路系统的一部分。
21.在本公开的实施方案中,读取器不稳定检测电路120对磁道上的数据扇区执行误码率计算,并采用那些误码率计算来确定读取传感器118a、118b是否不稳定。如果发现读取传感器118a、118b不稳定,则可以将偏置冲击或热冲击施加到读取传感器118a、118b以重新布置如上所述的磁畴。下文结合图2描述了具有磁道和扇区的示例数据存储盘表面。
22.图2是根据具体实例的具有表面202的盘200的简化俯视图的图示,所述盘可以与扇区伺服系统(也称为嵌入式伺服系统)结合使用。盘200可以是例如图1的数据存储介质110。如图2所示,盘200包含用于将数据存储在盘表面202上的多个同心磁道204、206和208。尽管图2为了易于说明仅示出了少量磁道(例如,3个),但应了解,盘200的表面202上通常包含数千个磁道。
23.每个磁道204、206和208被划分成多个扇区209。扇区209中的每一个通常被划分成伺服部分或伺服扇区212和数据存储部分或数据扇区214。为了简化,仅在一个扇区中示出伺服部分和数据存储部分。可以从例如204、206和208等磁道读取数据,所述磁道具有具备例如单个读取器(例如,单个mr传感器(例如,图1的118a或118b))或多个读取器(例如,两个或更多个mr传感器(例如,118a、118b等))的磁头。如上所述,在数据存储装置的寿命期间,读取传感器(例如,mr传感器)可能会变得不稳定。
24.图3是根据一个实施方案的可以恢复被发现不稳定的读取传感器的方法300的流程图。在302处,一个或多个读取器(例如,图1的mr传感器118a和/或mr传感器118b)读取磁道(例如,图2的204、206、208)的扇区(例如,图2的209)。在304处,确定在读取磁道时是否已
发生读取错误。如果未检测到读取错误,则控制转到306。在306处,确定磁道的读取操作是否完成(例如,确定是否读取了预定数量的扇区(例如,由主机确定的数个扇区、数百个扇区或数千个扇区))。如果读取了预定数量的磁道扇区,则在308处,读取操作结束或退出。如果尚未读取预定数量的磁道扇区,则在310处累积读取完成时间。在完成310后,控制转到302以继续读取操作。
25.如果在304处检测到读取错误,则控制转到进行读取重试操作的312a。一般来说,可以进行第一预定数量的(一个或多个)重试操作(312a-312p)。如果在第一预定数量的读取重试操作之后,来自错误扇区/磁道的数据未恢复,则控制转到314。在314处,确定(在310处累积的)读取完成时间是否大于预定读取完成时间阈值。如果读取完成时间小于或等于读取完成时间阈值,则在312q处继续读取操作。如果读取完成时间大于读取完成时间阈值,则读取器可能不稳定,并且控制转到316。应注意,如果重试操作312a-312n中的任何一个成功读取数据,则控制转到检查用于满足主机读取命令的所有扇区是否都被读取的306。
26.如果磁头具有多个读取传感器,则在316处标识所述多个读取传感器中活动的读取传感器(例如,在304处产生错误且在重试操作312a-312p中采用的读取传感器)以进行不稳定检测。应注意,如果磁头包含单个读取传感器,则跳过316。在318处,针对单个读取传感器或者多个读取传感器中的已标识读取传感器进行不稳定确定测量。在320处,基于不稳定测量,确定单个读取传感器或者多个读取传感器中的选定读取传感器中是否存在不稳定。如果单个读取传感器或者多个读取传感器中的已标识读取传感器不稳定,则在322处,通过例如图1的读取器恢复电路122将偏置冲击和/或热冲击施加到不稳定磁头。
27.在324处,针对单个读取传感器或者多个读取传感器中的选定读取传感器再次进行不稳定确定测量。在326处,确定是否仍存在不稳定,以及偏置冲击和/或热冲击的施加次数是否少于预定偏置冲击数阈值。如果仍存在不稳定并且施加到读取传感器的偏置冲击和/或热冲击少于预定偏置冲击和/或热冲击数阈值,则控制返回到322,并且重复322-326,直到读取传感器不再不稳定或者符合或超过预定偏置冲击和/或热冲击数阈值。如果读取器不再不稳定或者符合或超过预定偏置冲击和/或热冲击数阈值,则控制转到继续读取重试操作的312q。可重复读取重试操作,直到312n,其为读取重试数极限。如果在耗尽所有读取重试尝试之后,仍无法读取数据,则读取错误可以返回到主机(例如,图1的150)。
28.如上文结合图1所指出,磁头112可以具有单个读取传感器(例如,传感器118a),或可以包含多个读取传感器(例如,118a、118b等)。下文分别结合图4a和4b描述用于确定单个读取传感器(例如,118a)是否不稳定以及两个读取传感器(例如,118a或118b)中的一个特定读取传感器是否不稳定的实施方案。
29.图4a是根据一个实施方案的确定单读取器磁头内的读取传感器是否不稳定的方法400的流程图。可以在图3的318-326中的一处或多处进行方法400或方法400的部分。在402处,测量检测到读取错误的磁道(图2的204、206或208),所述磁道例如在执行图3的304期间每个不同扇区(例如,图2的209)或每个数据扇区部分(例如,图2的214)的扇区错误位(bie)或扇区误码率(ber)。可以针对读取传感器在第一次单盘旋转期间读取的数据确定所有扇区bie和/或ber值。在404处,确定磁道的(根据各扇区的bie和/或ber值计算的)平均ber是否在感兴趣范围内以限定为边际ber(例如,大于或等于第一预定ber阈值(图4a和4b中的阈值1)并且小于或等于第二预定ber阈值(图4a和4b中的阈值2))。应注意,ber是负数,
并且因此,第一预定ber阈值(阈值1)是比第二预定ber阈值(阈值2)更负(例如,更小/更差)的负数。图5a是示出较差ber区502和边际ber区504的ber分布图表500。
30.返回参考图4a,如果在404处发现磁道的平均ber在感兴趣范围内(例如,是边际ber),则控制转到再次测量(发生错误的)同一磁道的每个不同扇区或每个数据扇区部分的扇区bie或扇区ber的406。可以针对读取传感器在第二次单盘旋转期间读取的数据确定所有扇区bie和/或ber值。
31.图5b是包含扇区ber或bie值的曲线图的图表510。在图5b中,曲线图512表示在402处针对不同扇区获得的ber或bie值,并且曲线图514表示在406处针对不同扇区获得的ber或bie值。图表510还示出了第一预定ber阈值516和第二预定ber阈值518。
32.图5c是包含在(图4a的)402和406处获得的扇区ber或bie(ber增量)的绝对值之间的差的曲线图522的图表520。图5c还示出了预定ber差阈值(dber)524。如图5c中可见,ber增量值中的一些高于dber。产生高于dber的ber增量值的扇区在本文中被称为波动扇区。
33.返回参考图4a,在408处,确定波动扇区的数量是否大于波动扇区的预定数量(图4a和4b中的阈值3)。如果波动扇区的数量大于波动扇区的预定数量,则在410处,将偏置冲击和/或热冲击施加到读取传感器,并且方法继续进行到412处的下一次重试。如果波动扇区的数量小于或等于波动扇区的预定数量,则确定读取传感器并非不稳定,并因此跳过410,并且方法继续进行到412处的下一次重试(例如,图3的312q)。
34.返回参考图4a的404,如果发现磁道的平均ber超出感兴趣范围(例如,不是边际ber),则控制转到414。在414处,确定磁道的平均ber是否小于第一预定ber阈值。如果磁道的平均ber大于或等于第一预定ber阈值,则方法继续进行到412处的下一次重试(例如,图3的312q)。如果在414处发现磁道的平均ber小于第一预定ber阈值,则控制转到在一个或多个不同磁道处测量扇区ber值以确定较差ber是来自失效位置问题还是读取器自身问题的416。一个或多个不同磁道可以是盘表面上的任何其它一个或多个磁道(例如,内径(id)磁道、中径(md)磁道和/或外径(od)磁道)。在418处,如果其它磁道的平均ber小于第一预定ber阈值,则在410处,将偏置冲击施加到读取传感器,并且方法继续进行到412处的下一次重试(例如,图3的312q)。如果在418处,id、md和od磁道的平均ber大于或等于第一预定ber阈值,则绕过410并且方法直接继续进行到412处的下一次重试(例如,图3的312q)。
35.图4b是根据一个实施方案的确定多读取器磁头内的一个或多个读取传感器是否不稳定的方法450的流程图。一般来说,方法450适用于具有两个或更多个读取传感器的磁头。方法450基本上类似于图4a的方法400。方法450添加了读取器/读取传感器选择。在401处,选择第一读取传感器,并且方法450根据图4a的方法400继续进行。然而,在继续进行到412处的下一次重试之前,在420处,确定是否已测试所有读取传感器。如果未测试所有读取传感器,那么在422处选择下一读取传感器(例如,第二读取传感器),并且方法450再次根据图4a的方法400继续进行。当针对不稳定处理了磁头中的所有读取器时,方法450完成。
36.在上文结合图4a和4b所描述的实施方案中,使用ber和平均ber来确定读取传感器是否不稳定。然而,如上文所指示,可使用bie代替ber来进行读取传感器不稳定确定。一般来说,可以利用任何合适的误码值(例如,ber、bie等)和预定误码值阈值(例如,第一预定误码值阈值、第二预定误码值阈值等)根据图4a和4b中所描述的方法来进行读取器不稳定确定。第一预定误码值阈值比第二预定误码值阈值更负(或更小/更差)。除了误码值之外或代
替误码值,还可以利用例如信号振幅(例如,伺服信号振幅和/或数据信号振幅)等其它读取信号质量指示符来确定读取传感器不稳定。因此,通用方法实施方案包含在读取传感器从数据存储介质上的第一磁道读取数据的第一读取操作期间检测读取错误。所述方法还包含在检测到所述读取错误之后,通过评估所述读取传感器是否在一个或多个后续读取操作期间表现得边际或更差来确定所述读取传感器是否不稳定。边际读取传感器性能是通过将来自所述读取传感器的至少一个读回值与一个或多个边际性能指示阈值进行比较来确定的。所述方法进一步包含响应于确定所述读取传感器表现得边际或更差而推断所述读取传感器是不稳定的。
37.根据各种实施方案,本文中所描述的方法可实施为在一个或多个微处理器或控制器装置上运行的一个或多个软件程序,所述微处理器或控制器装置例如包含在数据存储装置100中的微处理器。包含但不限于专用集成电路、可编程逻辑阵列和其它硬件装置的专用硬件实施方案可以同样地构造成实施本文中所描述的方法。存储在计算机可读取存储装置(例如,存储元件/存储介质110)上的指令在由处理器装置(例如,控制器102)执行时将处理器装置配置成执行本文中所描述的方法的步骤。
38.本文所述的实施方案的图示旨在提供对各种实施方案的结构的一般理解。图示不旨在用作利用本文所述的结构或方法的设备和系统的所有元件和特征的完整描述。在阅读本公开内容时,许多其它实施方案对于本领域的技术人员可能是显而易见的。可以利用其它实施方案并且可以从本公开中得出其它实施方案,使得可在不脱离本公开范围的情况下进行结构和逻辑上的替换和改变。另外,这些图示仅仅是代表性的,并且可能未按比例绘制。图示中的某些比例可能被放大,而其它比例可能被缩小。因此,应将本公开和附图视为说明性的而不是限制性的。
39.本公开的一个或多个实施方案可以在本文中单独地和/或共同地由术语“发明”指代,这仅仅是为了方便,而无意将本技术的范围限制于任何特定的发明或发明概念。此外,尽管本文已经示出和描述了特定的实施方案,但应当理解,设计用于实现相同或类似目的的任何后续布置可被替换用于所示的具体实施方案。本公开旨在涵盖各种实施方案的任何和所有后续的修改或变型。通过阅读说明书,上述实施方案的组合以及在本文中未具体描述的其它实施方案对本领域的技术人员将是显而易见的。
40.另外,在前述详细说明中,出于精简本公开的目的,可以将各种特征分组在一起或在单个实施方案中进行描述。本公开不应被解释为反映以下意图:所要求保护的实施方案使用比每项权利要求中所明确叙述的特征更多的特征。相反,如所附权利要求书所反映,本发明主题可以比任何所公开实施方案的所有特征要少。
41.上文公开的主题应被视为说明性的且不是限制性的,并且所附权利要求书意在涵盖落在本公开的真实精神和范围内的所有此类修改、增强和其它实施方案。因而,在法律允许的最大程度上,本公开的范围由下述权利要求及其等价方案的最宽允许解释决定,而不应由前述详细说明约束或限制。进一步的示例示例1.一种方法,包括:在读取传感器从数据存储介质上的第一磁道读取数据的第一读取操作期间检测读取错误;
在检测到所述读取错误之后,由所述读取传感器在所述第一磁道上执行第二读取操作,针对所述第二读取操作进行误码值测量,并且根据所述误码值测量确定所述读取传感器是否产生边际误码值,所述边际误码值介于第一预定误码值阈值与第二预定误码值阈值之间;响应于确定所述读取传感器产生所述边际误码值,由所述读取传感器在所述第一磁道上进行第三读取操作,并且针对所述第三读取操作进行误码值测量;以及当来自所述第二读取操作和所述第三读取操作的所述误码值测量满足至少一个预定读取传感器不稳定准则时,推断所述读取传感器不稳定。示例2.根据示例1所述的方法,并且进一步包括响应于所述读取传感器不稳定而进行读取传感器恢复操作以将所述读取传感器恢复到稳定状态。示例3.根据示例2所述的方法,并且其中所述进行所述读取传感器恢复操作包括将偏置冲击或热冲击中的至少一个施加到所述读取传感器。示例4.根据示例1所述的方法,并且另外包括在检测到所述读取错误之后并且在执行所述第二读取操作之前利用所述读取传感器执行至少一个读取重试操作。示例5.根据示例1所述的方法,并且其中针对所述第一磁道上的所述第二读取操作进行误码值测量包括针对所述第二读取操作测量所述第一磁道的每个单独扇区的误码值。示例6.根据示例5所述的方法,并且其中确定所述读取传感器是否针对所述第二读取操作产生所述边际误码值包括:针对所述第二读取操作计算所述磁道的所述单独扇区的所测量误码值的平均误码值;以及确定针对所述第二读取操作计算出的平均误码值是否介于所述第一预定误码值阈值与所述第二预定误码值阈值之间。示例7.根据示例6所述的方法,并且其中针对所述第三读取操作进行误码值测量包括针对所述第三读取操作测量所述第一磁道的每个单独扇区的误码值。示例8.根据示例7所述的方法,并且进一步包括:确定所述第一磁道的所述单独扇区的针对所述第二读取操作的所述误码值与所述第一磁道的所述单独扇区的针对所述第三读取操作的所述误码值之间的差的绝对值,以获得扇区误码波动值;将所述扇区误码波动值与预定扇区误码波动阈值进行比较;以及当高于所述预定扇区误码波动阈值的扇区误码波动值的数量大于预定扇区数量时,推断所述读取传感器不稳定,其中高于所述预定扇区误码波动阈值的扇区误码波动值的所述数量大于所述预定扇区数量是至少一个预定读取器不稳定准则。示例9.根据示例1所述的方法,并且进一步包括:通过针对所述第二读取操作测量所述第一磁道的每个单独扇区的误码值来针对所述第一磁道上的所述第二读取操作进行所述误码值测量;针对所述第二读取操作计算所述磁道的所述单独扇区的所测量误码值的平均误码值;以及
确定针对所述第二读取操作计算出的平均误码值是否不介于第一预定误码率阈值与第二预定误码率阈值之间。示例10.根据示例9所述的方法,并且进一步包括当针对所述第二读取操作计算出的所述平均误码值不介于所述第一预定误码值阈值与所述第二预定误码值阈值之间时,确定针对所述第二读取操作计算出的所述平均误码值是否小于所述第一预定误码值阈值。示例11.根据示例10所述的方法,并且进一步包括响应于针对所述第二读取操作计算出的所述平均误码值小于所述第一预定误码值阈值,在除了所述第一磁道以外的磁道上进行第四读取操作,并且针对所述第四读取操作进行误码值测量。示例12.根据示例11所述的方法,并且进一步包括:针对所述第四读取操作计算平均误码值;以及当针对所述第四读取操作的所述平均误码值小于所述第一预定误码值阈值时,推断所述第四读取操作的所述平均误码值是较差误码值并且所述读取传感器不稳定。示例13.根据示例12所述的方法,并且进一步包括响应于所述读取传感器不稳定而进行读取传感器恢复操作以将所述读取传感器恢复到稳定状态。示例14.根据示例13所述的方法,并且其中所述进行所述读取传感器恢复操作包括将偏置冲击或热冲击中的至少一个施加到所述读取传感器。示例15.根据示例2所述的方法,并且其中所述读取传感器是同一磁头中的多个读取传感器中的第一读取传感器,并且所述偏置冲击或所述热冲击中的所述至少一个被施加到所述第一读取传感器并且未被施加到所述磁头中的所述多个读取传感器中的其它读取传感器。示例16.一种设备,包括:控制器;读取通道,其以通信方式耦合到所述控制器,所述读取通道包括读取器不稳定检测电路;前置放大器,其以通信方式耦合到所述读取通道;磁头,其以通信方式耦合到所述前置放大器,所述磁头包括至少一个读取传感器;并且所述读取器不稳定检测电路被配置成通过评估所述至少一个读取传感器是否在与所述前置放大器、所述读取通道和所述控制器通信的所述至少一个读取传感器所进行的一个或多个读取操作期间产生边际误码值或更差误码值来确定所述至少一个读取传感器是否不稳定,所述边际误码值介于第一预定误码值阈值与第二预定误码值阈值之间。示例17.根据示例16所述的设备,并且其中所述前置放大器进一步包括读取器恢复电路,所述读取器恢复电路被配置成进行读取传感器恢复操作以将不稳定读取传感器恢复到稳定状态。示例18.一种方法,包括:在读取传感器从数据存储介质上的第一磁道读取数据的第一读取操作期间检测读取错误;在检测到所述读取错误之后,通过评估所述读取传感器是否在一个或多个后续读取操作期间表现得边际或更差来确定所述读取传感器是否不稳定,边际读取传感器性能是
通过将来自所述读取传感器的至少一个读回值与一个或多个边际性能指示阈值进行比较来确定的;以及响应于确定所述读取传感器表现得边际或更差而推断所述读取传感器是不稳定的。示例19.根据示例18所述的方法,并且进一步包括响应于所述读取传感器不稳定而进行读取传感器恢复操作以将所述读取传感器恢复到稳定状态。示例20.根据示例19所述的方法,并且其中所述进行所述读取传感器恢复操作包括将偏置冲击或热冲击中的至少一个施加到所述读取传感器。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1