磁盘装置的制作方法
磁盘装置
1.本技术享受以日本专利申请2021-150270号(申请日:2021年9月15日)为基础申请的优先权。本技术通过参照该基础申请而包含基础申请的全部内容。
技术领域
2.实施方式涉及磁盘装置。
背景技术:
3.磁盘装置在使用时有时会因某种原因而发生故障。在这样的情况下,为了调查故障的原因,在磁盘装置安装高额的总线分析器(bus analyzer)来进行调查。
技术实现要素:
4.如上所述,在将总线分析器安装在磁盘装置的情况下,由于安装总线分析器而接口上的信号品质会变化,可能发生错误现象无法再现的情形。当发生了这样的情形时,即便使用了高额的总线分析器,也会无法调查磁盘装置的故障的原因。
5.另外,根据顾客对象,出于安全的原因,有时拒绝其进入磁盘装置的设置场所。在这样的情况下,无法安装总线分析器来进行调查。
6.而且,在磁盘装置中,有时磁盘装置自身存储有存储着自身的健康状态的smart(self-monitoring analysis and reporting technology,自我监测分析及报告技术)信息。在这样的磁盘装置的情况下,也考虑从发生了故障的磁盘装置读出smart信息来调查故障的原因。但是,smart信息的内容,具体地说,是如错误信息、错误发生次数等这样的有限的信息。因而,难以确定因主机与磁盘装置的接口上的故障而发生的故障的原因。
7.实施方式的目的在于,提供一种能够廉价地调查故障的原因的磁盘装置。
8.一实施方式涉及的磁盘装置具备:第1磁盘;第1致动器,对所述第1磁盘进行数据的读/写;第1控制部,控制所述第1致动器;第2磁盘;第2致动器,对所述第2磁盘进行数据的读/写;及第2控制部,控制所述第2致动器。另外,所述第1控制部执行读/写处理,所述第2控制部,在所述第1控制部执行所述读/写处理的情况下,存储该读/写处理的跟踪数据。
附图说明
9.图1是示出实施方式的磁盘装置的构成的一例的图。
10.图2是示出该实施方式的接收到读命令或写命令的情况下的处理的一例的流程图。
11.图3是示出该实施方式的命令“原语(primitive)”的定义的一例的图。
12.标号说明
[0013]1…
磁盘装置,100a、100b
…
soc(片上系统),101a、101b
…
mpu,120a、120b
…
致动器,160
…
ram,200
…
主机,300(300-1~300-6)
…
磁盘
具体实施方式
[0014]
以下,参照附图,对实施方式进行说明。此外,公开终究不过是一例,发明不受以下的实施方式中记载的内容所限定。本领域技术人员能够容易想到的变形当然包含于公开的范围。为了使说明更明确,在附图中,也存在将各部分的尺寸、形状等相对于实际的实施方案变更而示意性地进行表示的情况。在多个附图中,也存在对所对应的要素标注相同的参照数字并省略详细的说明的情况。
[0015]
(第1实施方式)
[0016]
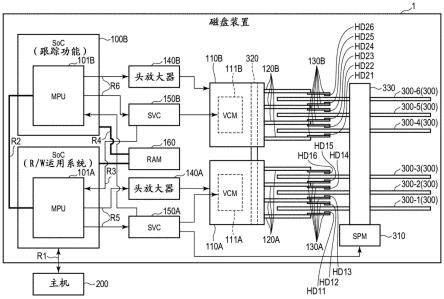
图1是示出磁盘装置1的构成的一例的图。
[0017]
如图1所示,磁盘装置1具备片上系统(soc:第1控制部)100a、soc(第2控制部)100b、音圈马达(vcm)部110a、110b、4个致动器120a、120b、4个悬架130a、130b、头放大器140a、140b、伺服组合(svc)150a、150b、ram160、磁盘300、主轴马达(spm)310、轴320、轴330。soc100a构成为能够与主机200及soc100b进行通信。
[0018]
磁盘300在本实施方式中设置有300-1~300~6(将它们统称作300。)这6张。这些磁盘300固定于轴330。轴330设置于spm310,当spm310旋转时,与该旋转同步地旋转。由此,磁盘300构成为也与spm310的旋转同步地进行旋转。
[0019]
4个致动器(第1致动器)120a隔开预定间隔地设置,以与磁盘(第1磁盘)300-1~300-3交替地重叠。另外,4个致动器120a固定于vcm部110a。而且,在4个悬架130a的前端且与盘面相对向的面分别设置有磁头hd11~hd16。由此,构成为在3张磁盘300-1~300-3的两面各定位有hd11~hd16中的某一个。
[0020]
另外,4个致动器(第2致动器)120b也与4个致动器120a同样地构成。也就是说,4个致动器120b隔开预定间隔地设置,以与磁盘(第2磁盘)300-4~300-6交替地重叠。另外,4个致动器120b固定于vcm部110b。而且,在4个悬架130b的前端且与盘面相对向的面分别设置有磁头hd21~hd26。由此,构成为在3张磁盘300-4~300-6的两面各定位有hd21~hd26中的某一个。
[0021]
vcm部110a及vcm部110b分别具有音圈马达(vcm)111a、vcm111b。通过vcm111a动作,vcm部110a转动,与此同时,固定于vcm部110a的致动器120a也转动。由此,能够使设置于悬架130a的前端的磁头(hd11~hd16)定位于磁盘300-1~300-3上的预定位置。另外,通过vcm111b动作,vcm部110b转动,与此同时,固定于vcm部110b的致动器120b也转动。由此,能够使设置于悬架130b的前端的磁头(hd21~hd26)定位于磁盘300-4~300-6上的预定位置。
[0022]
soc100a是包括微处理器(mpu)101a及图示省略的读/写通道以及硬盘控制器的芯片。另外,soc100b与soc100a同样,是包括微处理器(mpu)101b及图示省略的读/写通道以及硬盘控制器的芯片。mpu100a与mpu100b通过总线线路(bus line)(后述的路径r2)而连接。soc100a及soc100b分别与图示省略的存储器连接。该存储器包括非易失性存储器及易失性存储器。
[0023]
soc100a的mpu101a是磁盘装置1的控制器,执行对于磁盘300-1~300-3的读/写动作的控制及hd11~hd16的定位所需的伺服控制。读/写通道是处理与读出(读)/写入(写)相关联的信号的信号处理电路。硬盘控制器控制经由hd11~hd16、头放大器140a、读/写通道及mpu101a的、向磁盘300-1~300-3的数据写入和从磁盘300-1~300-3的数据读出。
[0024]
soc100b的mpu101b是磁盘装置1的控制器,执行对于磁盘300-4~300-6的读/写动
作的控制。读/写通道是处理与读出(读)/写入(写)相关联的信号的信号处理电路。硬盘控制器控制经由hd21~hd26、头放大器140b、读/写通道及mpu101b的、向磁盘300-4~300-6的写入数据和从磁盘300-4~300-6的数据读出。会在磁盘300-4~300-6存储后述的跟踪数据(trace data)。
[0025]
头放大器140a向hd11~16供给与从soc100a所包含的r/w通道供给的写数据相应的写信号(写电流)。另外,头放大器140a将从hd11~16输出的读信号放大,向soc100a所包含的r/w通道传送。头放大器140b向hd21~26供给与从soc100b所包含的r/w通道供给的写数据相应的写信号(写电流)。另外,头放大器140b将从hd21~26输出的读信号放大,向soc100b所包含的r/w通道传送。
[0026]
svc150a在mpu101a的控制下,执行磁头hd11~hd16的定位所需的伺服控制。svc150a将伺服控制的信息向mpu101b发送。另外,svc150b在mpu101b的控制下,执行磁头hd21~hd26的定位所需的伺服控制。svc150b将伺服控制的信息向mpu101a发送。
[0027]
ram160是在执行流控制(flow control)时作为缓冲存储器发挥功能的易失性存储器。ram160分别连接于soc100a及soc100b。其中,所谓流控制是指,按作为缓冲存储器发挥功能的ram160的各数据段(segment)具有扇区数的计数,数据在ram160展开,当计数达到阈值时通知信号。在作为该信号,通知读转送的情况下,不经由固件,向主机200开始读数据转送,从磁盘300向ram160读入后续的数据。另外,在作为该信号,通知写转送的情况下,是指不经由固件,向主机200发送命令(例如xfer_rdy),从主机200接受的写数据在ram160展开,从ram16到磁盘300原样被写入的控制。在本实施方式中,在从ram160向磁盘300-4~300-6写入跟踪数据的情况下也执行流控制。
[0028]
主机200是磁盘装置1的上位装置。主机200向磁盘装置发送读命令、写命令等命令,从磁盘装置1接收读数据、处理结果等。主机200通过serial attached scsi(sas)或serial ata(sata)标准的接口而与soc100a连接。
[0029]
如以上那样,磁盘装置1构成为能够独立地进行mpu101a对磁盘300-1~300-3进行的处理和mpu101b对磁盘300-4~300-6进行的处理。也就是说,磁盘装置1成为了具有所谓的多致动器的磁盘装置。因而,磁盘装置1能够执行两系统的不同的处理。在本实施方式中,以在磁盘装置中soc100a执行读/写处理的情况下,soc100b执行存储soc100a执行的读/写处理的跟踪数据的处理的情况进行说明。
[0030]
例如,在从主机200接收到写命令的情况下,经由路径r1向soc100a发送写命令。在接收到写命令的情况,从soc101a内的mpu101a向soc101b内的mpu101b经由路径r2发送写命令。另外,写命令经由路径r3向ram160发送,保持于ram160。在进行保持于该ram160中的写命令的写处理的情况下,写处理的内容经由路径r3被向mpu101a发送而执行写处理,并且,经由路径r4被向mpu101b发送。构成该路径r4的总线是为了存储跟踪数据而设置的专用总线的总线线路。mpu101a控制头放大器140a及svc150a,基于写处理的内容而对磁盘300-1~300-3执行写处理。另外,mpu101b控制头放大器140a及svc150a,执行对磁盘300-4~300-6写入写处理的内容(跟踪数据)的写处理。
[0031]
接着,对磁盘装置从主机接收到读命令或写命令的情况下的处理进行说明。图2是示出接收到读命令或写命令的情况下的处理的一例的流程图。此外,该处理是在图示省略的电源向磁盘装置1接入之后被执行的处理。
[0032]
首先,mpu101a执行开机(power on)处理(st101)。在此,所谓开机处理,是将在流控制中使用的缓冲存储器初始化等的处理。在本实施方式中,ram160被初始化,从图示省略的非易失性存储器向ram160读入后述的触发条件、过滤条件等。例如,在命令超时(time out)的调查中,能够设定过滤条件,以将原语中的align(在链路速率(link rate)的速度调整中使用)、notify(马达起动指示)过滤掉。align、notify向if上持续发送多个。因而,通过将这些设定为过滤条件,能够节约跟踪数据的存储区域。
[0033]
接着,mpu101b开始跟踪数据的记录(st102)。然后,mpu101b存储跟踪数据(st103)。不过,由于主轴马达310等尚处于就绪(ready)状态,所以,mpu101b不将跟踪数据存储于磁盘300-4~300-6,而在ram160上通过环(ring)形式保持跟踪数据。
[0034]
在这样的状态下,mpu101a判定是否符合了触发条件(st104)。例如,在想要调查主机200侧发送的命令的超时错误的情况下,主机200侧对于磁盘装置1中止(abort)该命令,所以,发送任务框架(task frame:abort task等),在即便如此也不做出响应的情况下,发送命令(hard_reset primitive)。在这样的构成的情况下,考虑将(hard_reset primitive)设为触发条件。图3是示出命令“原语(primitive)”的定义t的一例的图。
[0035]
在判定为不符合触发条件的情况下(st104:否),mpu101a结束该处理。另一方面,在判定为符合触发条件的情况下(st104:是),mpu101b判定主轴马达310等是否处于就绪状态(st105)。在判定为不处于就绪状态的情况下(st105:否),处理向步骤st103返回。
[0036]
在判定为处于就绪状态的情况下(st105:是),mpu101a开启(on)数据写(st106)。由此,mpu101a对磁盘300-1~300-3执行数据的写。此外,在本实施方式中,以数据写的情况进行说明,但数据读的情况下也是同样的。
[0037]
接着,mpu101a开启跟踪数据侧的流控制(st107)。由此,执行mpu101b的流控制。接着,mpu101a监视ram160,判定扇区计数是否达到了阈值(st108)。在判定为扇区计数没有达到阈值的情况下(st108:否),mpu101a暂时停止致动器(第1致动器)120a的写(st109)。这是因为没有从ram160向磁盘300-4~300-6的预定区写入的跟踪数据。另外,在判定为扇区计数达到了阈值的情况下(st108:是),mpu101a继续致动器(第1致动器)120a的写(st110)。由于还有从ram160向磁盘300-4~300-6的预定区写入的跟踪数据,所以,流控制继续。
[0038]
接着,mpu101b判定是否有空闲(st111)。具体地说,判定磁盘300-4~300-6是否有存储跟踪数据的区域的空闲。在判定为有空闲的情况下(st111:是),处理返回步骤st103。由此,反复进行上述的步骤st103至st110的处理,存储跟踪数据。
[0039]
另一方面,mpu101b在判定为没有空闲的情况下(st111:否),mpu101b判定记录方式是否是环形式(st112)。在判定为记录方式是环形式的情况下(st112:是),处理返回步骤st103。由此,反复进行上述的步骤st103至st110的处理,存储跟踪数据。另外,在由mpu101b判定为记录方式不是环形式的情况下(st112:否),该处理结束。
[0040]
根据如以上那样构成的磁盘装置1,soc100a执行读/写处理,soc100b在soc100a执行读/写处理的情况下,存储该读/写处理的跟踪数据。因而,磁盘装置1在发生了故障的情况下,操作者通过对存储于磁盘300的跟踪数据进行确认及分析,能够调查在磁盘装置发生了何种故障。因此,磁盘装置1无需高额的总线分析器,能够廉价地调查故障的原因。
[0041]
另外,磁盘装置1能够不以命令级而以位于比命令级(command level)的层靠下层的“原语(primitive)”为单位对接口的故障进行解析。因而,磁盘装置1能够进行更详细的
故障的调查。
[0042]
而且,磁盘装置1构成为使对于磁盘300-1~300-3读/写的致动器120a和对于磁盘300-4~300-6写跟踪数据的致动器120b单独动作。因而,磁盘装置1在写跟踪数据的情况下,无需停止基于读/写的数据的转送的流控制。因此,磁盘装置1能够不对i/o处理量(throughput)性能造成影响地向磁盘300-1~300-3写跟踪数据。
[0043]
而且,在上述实施方式中,关于soc100a与主机200的连接,对通过基于sas或sata的标准的接口来连接的情况进行了说明,但不限于此。例如,在soc100a与主机200基于non-volatile memory express(nvme)的规定连接的情况下,也能够适用上述实施方式的技术。
[0044]
此外,虽然说明了本发明的几个实施方式,但这些实施方式是作为例子而提示的,并非意在限定发明的范围。这些新颖的实施方式能够以其他各种各样的方式来实施,能够在不脱离发明的主旨的范围内进行各种省略、置换、变更。这些实施方式和/或其变形,包含于发明的范围、主旨,并且,包含于权利要求书所记载的发明及其等同的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1