电容式触摸传感器的制作方法
电容式触摸传感器
背景技术:
1.触摸传感器继续取代机械设备(诸如按钮和开关)作为到家用电器、车辆和销售点终端等各种电子设备中的用户输入。经常使用电容式触摸传感器,其中一些由具有重叠区域并隔开一定距离的两个极板组成。触摸会使其中一个极板偏转,从而改变两个极板之间的距离,并通过扩展改变两个极板之间的电容。电容式触摸传感器的敏感度取决于被触摸极板的厚度,即触摸使其偏转的程度以及两个极板之间的距离。
2.较薄的极板对应于增加的敏感度,但结构强度较差,使得传感器可能会永久变形并变得无法使用。在基于触摸的界面中,多个电容式触摸传感器紧密接近时,较薄的极板上的触摸可能会导致多于一个触摸传感器之上的极板的部分偏转,从而导致界面错误地识别其他触摸传感器处的触摸。较厚的极板对应于更好的结构强度,但会降低敏感度,使得较厚的极板上的触摸可能不会使极板偏转并改变足以识别触摸的电容。
技术实现要素:
3.一种装置包括电路板和导电覆盖层,电路板具有在电路板表面上的第一导电焊盘,导电覆盖层具有第一覆盖表面和与第一覆盖表面相反的第二覆盖表面。导电覆盖层被配置为响应于第一覆盖表面上的触摸而偏转,并且突出部从第二覆盖表面突出。突出部被配置成为第二导电焊盘。电路板、导电覆盖层和突起部被布置成使得第二覆盖表面面向电路板表面并且与第一导电焊盘隔开第一距离。突起部与第一导电焊盘隔开第二距离并具有重叠区域。
4.在一些示例中,突起部的表面基本上是平坦的并且平行于第一导电焊盘。突起部是圆柱形的,使得突起部的表面在一些示例中是圆形的,并且突起部是棱柱形的,使得突起部的表面在其他示例中是矩形的。在一些示例中,第一导电焊盘和突起部之间的重叠区域小于第一导电焊盘的面积。在一些实施方式中,导电覆盖层具有选择的第一厚度,使得导电覆盖层响应于第一覆盖表面上的触摸而偏转,并且突起部具有选择为在第一距离和第二距离之间不同的第二厚度。在一些示例中,导电覆盖层包括触摸部分,并且响应于触摸部分处的第一覆盖表面上的触摸而偏转。突起部在对应于触摸部分的位置处从第二覆盖表面突出。
5.在一些实施方式中,间隔件从第二覆盖表面在触摸部分之外的位置处突出,并且具有选择的第三厚度,使得间隔件响应于在触摸部分处的第一覆盖面上的触摸减少在触摸部分之外的位置处的导电覆盖层的偏转。在一些示例中,间隔件接触电路板表面,并且进一步选择第三厚度,使得间隔件将第一导电焊盘与第二覆盖表面隔开第一距离并且与突起部隔开第二距离。在一些实施方式中,间隔件是第一间隔件,并且电路板具有在电路板表面上的接触第一间隔件的第二间隔件。第二间隔件具有选择的第四厚度,使得第一间隔件和第二间隔件将第一导电焊盘与第二覆盖表面隔开第一距离并且与突起部隔开第二距离。
6.附图图示
7.对于各种示例的详细描述,现在将参考附图,其中:
250b的高度和所得距离d。导电极板210的厚度260也影响触摸传感器200的耐用性,例如太薄的导电极板将永久变形,而不是偏转。类似地,在具有多个紧密接近的触摸传感器的系统中,太薄的导电极板和不够坚硬的间隔件可能会导致在一个传感器上的触摸,从而使导电极板在其他传感器之上偏转,从而导致它们错误地识别触摸。
21.图3a-图3c图示具有多个触摸传感器的示例触摸传感器系统300a-300c,其类似于图2a中所示的触摸传感器200。在图3a中,触摸传感器系统300a包括具有厚度360a的导电极板或覆盖层310a、间隔件350a-350c和电路板340上的传感器焊盘320a-320b。间隔件350a-350c将导电极板310a与传感器焊盘320a-320b隔开距离da,该距离由电介质330填充。传感器焊盘320a与用作第一触摸传感器的导电极板310a形成第一电容器。传感器焊盘320b与用作第二触摸传感器的导电极板310a形成第二电容器。传感器焊盘320a-320b之间的间隔件350b试图保持距离da,使得导电覆盖层310a在传感器焊盘320a之上的偏转也不会导致导电覆盖层310a在传感器焊盘320b上的偏转,反之亦然,偏转会导致触摸传感器之一错误地识别触摸。
22.导电极板310a的厚度360a大于导电极板210的厚度260,使得导电极板310a在响应于人类手指390的触摸时不会像导电极板210那样多的偏斜。导电覆盖层310a的厚度360a导致距离人类手指390触摸的距离变化δda非常小,使得电容的相应变化可能小于指示触摸的电容变化的阈值。因此,导电覆盖层310a的较大厚度360a降低触摸传感器系统300a的敏感度。
23.在图3b中,触摸传感器系统300b与触摸传感器系统300a基本相同,但包括导电极板310b,其具有与传感器焊盘320a-320b隔开距离db的厚度360b。导电极板310b的厚度360b小于导电极板210的厚度260和导电极板310a的厚度360a,使得导电极板310b响应于人类手指390触摸而偏转大于导电极板210或导电极板310a。导电覆盖层310b的厚度360b导致距人类手指390触摸的距离变化δdb相当大,使得触摸传感器系统300b比触摸传感器系统300a更敏感。
24.然而,导电覆盖层310b的较小厚度360b对应于比导电极板310a的较大厚度360a更弱的结构,使得导电覆盖层310b上的触摸可能导致触摸传感器系统300b变形。间隔件350b可能不足以保持距离db,使得导电极板310b在传感器焊盘320b之上的偏转也会导致导电极板310b在传感器焊盘320a之上的偏转。传感器焊盘320a之上的偏转导致第一触摸传感器错误地识别触摸。较小的厚度360b也可能导致导电极板310b在移除触摸后与其之前的位置370相比保持变形。变形的导电极板310b可以保持与传感器焊盘320a-320b间隔距离db-δdb,该距离db-δdb小于与其先前位置370相关联的距离db。
25.在图3c中,触摸传感器系统300c类似于触摸传感器系统300a-300b,但包括导电覆盖层310c,其具有与传感器焊盘320a-b隔开距离dc的不同厚度,该距离dc大于距离da或db并且省略间隔件350a-350c。导电覆盖层310c包括带有第一厚度364的其自己的间隔件382、384和386。选择第一厚度364以将传感器焊盘320a-320b和导电极板310c的不是间隔件382、384和386的部分隔开距离dc。导电极板310c上的间隔件382、384和386比间隔件350a-350c更高且更坚硬,以防止导电覆盖层310c与导电极板310b一样变形并错误地识别其他附近传感器焊盘上的触摸。
26.导电极板310c的不是间隔件382、384和386的部分具有小于第一厚度364的第二厚
度368,并且第二厚度368被选择为允许由于人类手指390的触摸而发生偏转。偏转导致距离变化δdc,这可能与针对导电极板210偏转的距离变化δd基本相同。尽管与距离d相比的距离变化δd导致电容变化足以识别触摸,但与较大距离dc相比的距离变化δdc基本相同,导致电容变化不足以识别触摸。因此,用于间隔件382、384和386的导电极板310c的第一厚度364导致更强大和更耐用的触摸传感器系统300c,但也降低了触摸传感器系统300c的敏感度,使得人类手指390必须施加更多压力并且偏转导电覆盖层310c更多,以便改变电容足以被识别为触摸。
27.图4a-图4c图示了示例触摸传感器系统400a-400c。在图4a中,触摸传感器系统400a包括带有在电路板440上的传感器焊盘420之上的突起部490的导电极板或覆盖层410a。导电极板410a具有变化的厚度并通过电介质430与传感器焊盘420隔开。导电极板410a具有可以在触摸部分415处被触摸的第一平面表面,由括号指示,以及一组内部相反平面表面,其面向传感器焊盘420和电路板440。该组内部表面包括第一内部表面,该第一内部表面在导电覆盖层410a未被接触时从间隔件沿与传感器焊盘420的顶部基本共面的方向延伸;第二内部表面,该第二内部表面从第一内部表面朝向传感器焊盘420垂直延伸;第三内部表面,该第三内部表面在导电覆盖层410a未被接触时,从第二内部表面沿与第一内部表面基本共面的方向延伸,以定义突起部490;第四内部表面,该第四内部表面从第三内部表面远离传感器焊盘420垂直延伸;以及第五内部表面,该第五内部表面在导电覆盖层410a未被接触时与第一内部表面基本共面延伸。第一内部表面和第五内部表面可以在所图示的横截平面之外相遇。导电覆盖层410a的变化厚度允许触摸传感器系统400a实现耐用性和触摸隔离,同时避免触摸传感器系统300c中所图示的敏感度相应降低。
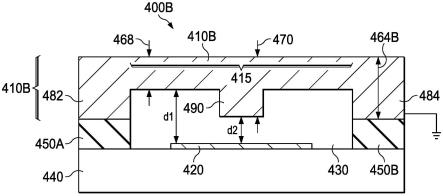
28.导电覆盖层410a可以在突起部490和导电覆盖层410的剩余部分中具有均匀或变化的成分。在这方面,导电覆盖层410a可以包括任何合适的导电材料,其包括金属、导电聚合物、金属浸渍的聚合物以及它们的组合,该导电材料允许导电覆盖层410a响应于触摸而偏转。特别地,具有第一厚度468的导电覆盖层410a的部分响应于导电覆盖层410a的第一平面表面上的触摸而偏转并且与传感器焊盘420隔开第一距离d1。导电覆盖层410a的具有第二厚度464a的部分用作间隔件482和484,并确保在没有触摸的情况下,具有第一厚度468的导电覆盖层410a的部分与传感器焊盘420隔开第一距离d1。具有第三厚度470的导电覆盖层410a的部分即突起部490与传感器焊盘420隔开第二距离d2,第二距离d2小于第一距离d1。具有第二厚度464a的导电极板410a的间隔件482和484为导电覆盖层410a提供了与图3c中所示的导电极板310c相关联的更坚固的结构。突起部490使触摸传感器系统400a能够根据距离变化δd识别触摸,该距离变化δd相对于总距离更大(例如,与更大的距离d1相比,距离d2),从而提高触摸传感器系统400a相对于触摸传感器系统300c的灵敏度。
29.在图4b中,触摸传感器系统400b类似于触摸传感器系统400a,但包括间隔件450a-450b和导电极板410b。与导电极板410a一样,导电极板410b的部分具有第一厚度468,响应于触摸部分415处的导电极板410b的第一平面表面上的触摸而偏转,由括号指示,并且与传感器焊盘420隔开第一个距离d1。与导电极板410a一样,导电极板410b上的突起部490具有第三厚度470并与传感器焊盘420隔开第二距离d2。
30.然而,与导电极板410a不同的是,导电极板410b的用作间隔件482和484的部分具有不同的第四厚度464b,其小于第二厚度464a并且大于第一厚度468。导电极板410b的带有
第四厚度464b的间隔件482和484分别位于间隔件450a-450b的顶部,其组合确保导电覆盖层410b的具有第一厚度468的部分与第一传感器焊盘420隔开第一距离d1。间隔件450a-450b和导电覆盖层410b的间隔件482和484的组合实现了与触摸传感器系统400a基本相同的耐用性、触摸隔离和敏感度。
31.间隔件450a-450b在材料和/或成分上可以与导电覆盖层410b相似或不同。在使用间隔件450a-450b的材料比使用极板410b的导电材料更便宜的一些示例中,可以选择间隔件450a-450b的组合和导电覆盖层410b的间隔件482和484的较浅厚度464b以减少制造成本。在其他实施例中,选择该组合以降低触摸传感器系统400b的脆性,其中间隔件450a-450b的材料不如极板410b的材料坚硬,允许触摸传感器系统400b在高压下弯曲而不是折断,但是足够坚硬以保持系统的耐用性和触摸隔离。
32.在图4c中,触摸传感器系统400c类似于触摸传感器系统400b,但包括导电极板410c。与导电极板410b一样,导电极板410c的部分具有第一厚度468,响应于触摸部分415(由括号指示)处的导电极板410c的第一平面表面上的触摸而偏转,并且与传感器焊盘420隔开第一个距离d1。与导电极板410b一样,导电极板410c上的突起部490具有第三厚度470,并与传感器焊盘420隔开第二距离d2。
33.然而,与导电极板410b不同,导电极板410c不包括用作间隔件的部分,无论是第二厚度464a还是第四厚度464b。仅仅间隔件450a-450b确保导电覆盖层410c的具有第一厚度468的部分与传感器焊盘420隔开第一距离d1。在使用间隔件450a-450b的材料比使用极板410c的导电材料更便宜的一些示例中,可以省略间隔件482和484以降低制造成本。在其他实施例中,间隔件450a-450b的材料足够坚硬以保持系统的耐用性和接触隔离,其中包括导电覆盖层410c上的间隔件482和484。
34.图5图示了带有突起部590的导电极板或覆盖层500的内平面表面,其可用作触摸传感器系统400a-400c中的导电极板410a-410c。导电极板500在区域520中具有第一厚度568,其被配置为响应于触摸而偏转。导电覆盖层500在区域580中具有第二厚度564,其用作间隔件。导电覆盖层500在突起部590处具有第三厚度570。尽管在该示例中,突出部590示出为基本居中在区域520中,但在其他实施方式中,突出部590未居中在区域520中。突起部590的表面595被配置为面向对应的传感器焊盘放置,使得表面595和对应的传感器焊盘具有重叠区域。重叠区域可以小于相应传感器焊盘的表面区域。在一些实施方式中,重叠区域基本上居中在相应传感器焊盘之上,而在其他实施方式中重叠区域未居中在相应传感器焊盘之上。
35.表面595与相应的传感器焊盘隔开的距离小于区域520与其隔开的距离。尽管突起部590示出为圆柱形并且表面595示出为具有圆形形状,但反而可以使用任何适当的形状来获得在表面595和相应的传感器焊盘之间所需的共享表面区域,只要表面595是平的,而不是尖的或圆形的。在一些实施例中,突起部590是棱柱形的,使得表面595是矩形的。
36.图6图示了用于检测触摸传感器(诸如触摸传感器系统400a-400c)上的触摸的示例过程600。过程600被配置为由一个或多个处理单元执行,该处理单元能够读取和/或写入适当的非瞬态存储介质,诸如静态随机存取存储器(sram)。存储介质可用于存储从一个或多个处理单元接收的指令和数据。对于步骤610,并且在第一时间处,处理单元确定导电极板上的突起部的表面和电路板上的导电传感器之间的第一电容,电路板上的导电传感器与
突起部的表面隔开一段距离。例如,处理单元确定在任何触摸传感器系统400a-400c中的突起部490的表面和传感器焊盘420之间的第一电容,它们由距离d2隔开。
37.对于步骤620和在随后的时间处,处理单元确定突起部的表面和导电传感器之间的后续电容。在步骤630处,处理单元比较第一电容和后续电容。在步骤640处,如果处理单元确定第一电容和后续电容之间的电容变化不大于电容变化的阈值,则处理单元进行到步骤650。可以选择电容变化的阈值来表示由于触摸导电极板而导致的电容变化,从而减小了突起部的表面和导电传感器之间的距离。在步骤650处,处理单元将后续电容存储为第一电容并继续重复步骤620-640。
38.在步骤640处,如果处理单元确定第一电容和后续电容之间的电容变化大于电容变化的阈值,则处理单元输出指示在导电极板上有足够的压力的触摸的通知,以减小突起部的表面和导电传感器之间的距离,使得产生的电容变化大于电容变化的阈值。也就是说,处理单元输出指示触摸传感器上的触摸的通知。
39.整个说明书都使用了术语“耦合”。该术语可能涵盖实现与本公开的描述一致的功能关系的连接、通信或信号路径。例如,如果设备a生成信号以控制设备b执行动作,则在第一个示例中,设备a耦合到设备b,或者在第二个示例中,设备a通过中间部件c耦合到设备b,如果中间部件c不会实质改变设备a和设备b之间的功能关系,使得设备b经由设备a生成的控制信号由设备a控制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1