末端执行器测定模块及利用该模块的末端执行器监控装置的制作方法
1.本实用新型涉及一种末端执行器(end effector)测定模块以及利用该末端执行器测定模块的末端执行器监控装置,尤其涉及一种通过安装到晶圆从设备前端模块(efem)进入半导体工艺装置的供应口而对末端执行器的移动路径进行测定,并利用所测定的移动路径对末端执行器的扭曲进行监控的末端执行器测定模块以及利用上述末端执行器测定模块的末端执行器监控装置。
背景技术:
2.在一般的半导体制造工程中,为了提升收率或品质而在洁净的无尘室内执行晶圆处理。
3.而且,伴随着元件的高度集成化、电路的微型化以及晶圆的大型化,维持整个无尘室内部的洁净状态在技术方面以及费用方面都是非常不利的条件。
4.最近开始只对晶圆周围空间的洁净度进行管理,图1是对一般的利用晶圆的半导体工艺装置进行图示的例示图,图2是对图1中所图示的利用晶圆的半导体工艺装置进行图示的另一例示图。
5.如图1以及图2所示,作为在将晶圆储藏到一种被称之为前开式晶圆传送盒(foup,front opening unified pod)11的密闭式存储盒的内部并固定到装载端口(load port)10的上方之后在上述前开式晶圆传送盒11与用于对晶元进行加工的半导体工艺装置30之间执行晶圆传递的晶圆移送装置,使用设备前端模块(efem,equipment front end module)20。
6.在上述设备前端模块(efem)20中,配备有包括晶圆搬送装置的晶圆移送室,而上述晶圆移送室的一侧连接到与前开式晶圆传送盒11结合的装载端口10。
7.此外,设备前端模块(efem)20的晶圆移送室的另一侧通过贯通口22连接到半导体工艺装置30,被储藏到前开式晶圆传送盒11内部的晶圆将利用机械臂21的末端执行器21a移送到半导体工艺装置30,或者在上述半导体工艺装置30中完成加工处理的晶圆将被移送到前开式晶圆传送盒11内部。
8.上述半导体工艺装置30可以将通过机械臂21的末端执行器21a装载到工作台31中的晶圆再通过机械臂32移送到工程装置并执行加工处理。
9.但是,当在末端执行器21a将晶圆放置到工作台31上或从工作台31取下晶圆的过程中与工作台31或内部壁发生碰撞时,可能会导致晶圆破损的问题以及产生微粒的问题。
10.而且,机械臂21是以利用链条或皮带移动多个关节的方式构成,当机械臂21沿着设计的路径移动时可以无扭曲且准确地沿着规定的路径进行移动,但是当皮带的张力下降或链条被拉伸的情况下,会导致路径发生变化的问题。
11.此外,韩国授权专利公报第10
‑
1613135号(发明名称:半导体基板的位置检测装置以及位置检测方法)公开了一种从利用摄像头拍摄到的影像数据准确地检测出圆盘上的基板的中心位置坐标,并借此计算出在处理过程中被搬送的圆盘上的基板的支撑部件的位置
偏移量,从而通过准确地将其重置到重置位置上而执行位置补正的位置检测装置。
12.但是,因为现有技术的位置检测装置需要使用摄像头,因此会导致构成变得复杂且装置大小增加的问题。
13.此外,因为是利用从影像数据提取出的数据计算出基板的中心位置坐标,因此会导致数据运算过程变得复杂的问题。
技术实现要素:
14.技术问题
15.为了解决如上所述的问题,本实用新型涉及一种末端执行器测定模块以及利用上述末端执行器测定模块的末端执行器监控装置,其目的在于提供一种通过安装到晶圆从设备前端模块(efem)进入半导体工艺装置的供应口而对末端执行器的移动路径进行测定,并利用所测定到的移动路径对末端执行器的扭曲进行监控的末端执行器测定模块以及利用上述末端执行器测定模块的末端执行器监控装置。
16.技术方案
17.为了达成如上所述的目的,本实用新型之一实施例的末端执行器测定模块安装在配备有末端执行器的设备前端模块(efem,equipment front end module)和用于对晶圆进行加工处理的半导体工艺装置之间形成的贯通口,输出与通过上述贯通口的上述末端执行器的移动路径对应的电信号。
18.此外,本实用新型之实施例的上述末端执行器测定模块以与上述末端执行器的移动路径垂直相交的方式安装。
19.此外,本实用新型之实施例的上述末端执行器测定模块包括:发光部,用于对测定用光线进行输出;以及受光部,用于对从上述发光部输出的光线进行受光。
20.此外,本实用新型之实施例的上述发光部被配置成,从上述末端执行器的下部向上部方向照射测定用光线。
21.此外,本实用新型之实施例的上述受光部根据随着末端执行器的移动发生变动的受光量输出电信号。
22.此外,本实用新型之实施例的上述末端执行器测定模块还包括:测定模块主体部,对上述发光部与受光部以彼此相向的方式进行固定支撑。
23.此外,本实用新型之一实施例的利用末端执行器测定模块的监控装置包括:末端执行器测定模块,安装在配备有末端执行器的设备前端模块(efem,equipment front end module)和用于对晶圆进行加工处理的半导体工艺装置之间形成的贯通口,输出与通过上述贯通口的末端执行器的移动路径对应的电信号;以及控制器,将从上述末端执行器测定模块输出的电信号与预先设定的基准值进行比较,并根据上述比较结果判断上述末端执行器的移动路径是否发生了变动。
24.此外,本实用新型之实施例的上述控制器判断上述电信号是否沿着时间轴发生了变化。
25.此外,本实用新型之实施例的上述控制器根据上述电信号高于或低于基准值或电信号的大小沿着时间轴变大或变小中的某一个,对上述末端执行器的偏移方向以及倾斜方向进行判断。
26.此外,本实用新型之实施例的末端执行器监控装置还包括:远程终端,通过网络与上述控制器连接,接收从上述控制器传送过来的上述末端执行器测定模块的电信号并进行输出。
27.此外,本实用新型之实施例的上述控制器在上述电信号为预先设定的临界值以上时向上述远程终端传送末端执行器的维修请求信号。
28.有益效果
29.本实用新型通过安装到晶圆从设备前端模块进入半导体工艺装置的供应口而对末端执行器的移动路径进行测定,并利用所测定到的移动路径对末端执行器的扭曲进行监控,从而可以自动确认机械臂的误操作的发生。
30.此外,本实用新型可以自动确认机械臂的误动作并提供给管理员等,从而可以轻易地对机械臂的维护以及保养进行管理。
附图说明
31.图1是对一般的利用晶圆的半导体工艺装置进行图示的例示图。
32.图2是对图1中所图示的利用晶圆的半导体工艺装置进行图示的另一例示图。
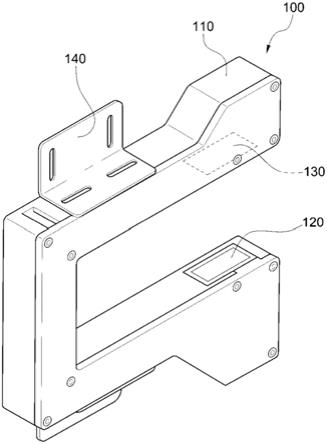
33.图3是对本实用新型之实施例的末端执行器测定模块进行图示的斜视图。
34.图4是对本实用新型之实施例的利用末端执行器测定模块的末端执行器监控装置进行图示的斜视图。
35.图5是对图4中所图示的利用末端执行器测定模块的末端执行器监控装置的构成进行图示的块图。
36.图6a至图6e是对图4中所图示的利用末端执行器测定模块的末端执行器监控装置的动作过程进行说明的例示图。
37.图7a至图7f是对图4中所图示的利用末端执行器测定模块的末端执行器监控装置动作时的电压分布进行图示的例示图。
38.附图标记:
39.10:装载端口
40.11:前开式晶圆传送盒(foup)
41.12:晶圆
42.20:设备前端模块
43.21:机械臂
44.21a:末端执行器
45.22、22':贯通口
46.30:半导体工艺装置
47.31:工作台
48.100、100':末端执行器测定模块
49.110:测定模块主体部
50.120:发光部
51.130:受光部
52.140:支架
53.200:控制器
54.300:远程终端
具体实施方式
55.接下来,将参阅本实用新型的较佳实施例以及附图对本实用新型进行详细的说明,其中,附图中相同的参考符号代表相同的构成要素。
56.在实用新型的详细说明或权利要求书中,当记载为某个构成要素“包括”其他构成要素时,除非另有明确的相反记载,否则并不应该解释为仅由相应的构成要素构成,而是应该理解为还可以包括其他构成要素。
57.接下来,将通过特定的实施例对本实用新型的利用末端执行器测定模块的末端执行器监控装置的一实现例进行详细的说明。
58.(测定模块)
59.图3是对本实用新型之实施例的末端执行器测定模块进行图示的斜视图。
60.如图3所示,本实用新型之一实施例的末端执行器测定模块100安装在配备有末端执行器的设备前端模块和用于对晶圆进行加工处理的半导体工艺装置之间的贯通口中,根据通过上述贯通口的上述末端执行器的移动路径输出对应的电信号,包括测定模块主体部110、发光部12以及受光部130。
61.此外,优选为,上述末端执行器测定模块安装在与上述末端执行器21a通过贯通口22、22'的移动路径垂直相交的位置上。
62.上述测定模块主体部110是以彼此相向的方式对上述发光部120以及受光部130进行固定支撑的构成,较佳地将上述发光部120配置在下部并将上述受光部130配置在上部,从而安装在彼此相向的位置上。
63.为此,上述测定模块主体部110可以将上部以及下部分离构成,也可以以截面形状为对上部以及下部进行连接的“匚”字形状或“口”字形状的形态构成。
64.此外,上述测定模块主体部110可以通过支架140固定到贯通口22、22'周边。
65.上述发光部120是用于输出一定波长范围的测定用光线的构成,可以利用如发光二极管(led)等发光元件构成。
66.此外,上述发光部120可通过配置在测定模块主体部110的下部而从上述末端执行器21a的下部向上部方向照射测定用光线。
67.将上述发光部120配置在测定模块主体部110的下部的构成可能会导致从上述发光部120输出的光线对形成于晶圆12上侧面的图案造成损伤的问题,而为了防止如上所述的问题,可从晶圆12的下部向上部方向照射测定用光线。
68.此外,上述晶圆12的背面为没有形成图案的部分,因此可以照射测定用光线。
69.上述受光部130是用于对从上述发光部120输出的测定用光线进行受光,并将根据受光的光线光量发生变化的输出值以电信号进行输出的构成,利用如光电二极管以及光探测器(pds)等在接收到光信号输入时转化成电信号并进行输出的受光元件构成。
70.即,上述受光部130根据因为末端执行器21a的移动而被遮挡的测定用光线的受光量输出对应的电信号。
71.(监控装置)
72.图4是对本实用新型之实施例的利用末端执行器测定模块的末端执行器监控装置进行图示的斜视图,图5是对图4中所图示的利用末端执行器测定模块的末端执行器监控装置的构成进行图示的块图。
73.如图3至图5所示,本实用新型之一实施例的利用末端执行器测定模块的监控装置包括:末端执行器测定模块100、100',安装在配备有末端执行器21a的设备前端模块20和用于对晶圆12进行加工处理的半导体工艺装置30之间的贯通口22、22'中,根据通过上述贯通口22、22'的末端执行器21a的移动路径对其位置进行测定并以电信号进行输出;以及控制器200。
74.上述末端执行器测定模块100包括测定模块主体部110、发光部120以及受光部130,上述末端执行器测定模块100通过支架140对测定模块主体部110进行固定并借此将其固定安装到上述贯通口22、22'周边。
75.上述发光部120是用于输出一定范围波长的测定用光线的构成,通过配置在测定模块主体部110的下部而从上述末端执行器21a的下部向上部方向照射测定用光线。
76.上述受光部130在上述发光部120的上部相向安装,通过对从上述发光部120输出的测定用光线进行受光而输出与所受光光线的光量对应的电信号。
77.上述控制器200将从末端执行器测定模块100、100'输出的电信号与预先设定的基准值进行比较,并根据上述比较结果判断上述末端执行器21a的移动路径是否发生了变动。
78.此外,上述控制器200确认从上述末端执行器测定模块100、100'输出的电信号是否沿着时间轴发生变化并借此判断上述末端执行器21a的移动路径是否发生了变动(或扭曲)。
79.图6a至图6e对末端执行器21a通过受光部130的多种移动路径进行了图示,如图6a至图6e所示,可以呈现出不同的状态。
80.图6a是末端执行器21a沿着正常的移动路径移动的状态,上述末端执行器21a沿着与受光部130垂直相交的方向移动,此时,以上述受光部130的一部分区域被遮挡,例如受光部130的50%区域被遮挡的状态进行移动。
81.上述受光部130的50%区域被遮挡的状态,是用于判断上述末端执行器21a是否沿着正常路径移动的标准,可以确认上述末端执行器21a向哪个方向发生了扭曲偏移或向哪个方向发生了倾斜。
82.即,在上述末端执行器21a遮挡受光部130的50%区域的情况下,上述受光部130的一般将被遮挡,而在如上所述的状态下,上述受光部130的输出值(电压)可以以如图7a所示的方式设定为基准值。
83.此外,在上述末端执行器21a正常移动的情况下,受光部130将输出如图7b所示的与基准值一致的电压值。
84.图6b以及图6c是移动路径发生扭曲偏移的状态,其中,图6b显示上述末端执行器21a向受光部130的左侧偏移移动的状态,而图6c显示上述末端执行器21a向受光部130的右侧偏移移动的状态。
85.即,如图6b所示,在末端执行器21a向受光部130的左侧偏移时,受光部130中受到遮挡的部分将变大,因此从上述受光部130输出的电压将如图7c所示地变小。
86.此外,如图6c所示,在末端执行器21a向受光部130的右侧偏移时,受光部130中受
到阻挡的部分将变小,因此从上述受光部130输出的电压将如图7d所示地变大。
87.通过如上所述的受光部130的电压值(或输出值)变动可以得知,末端执行器21a的移动路径本身正常,但是与正常位置相比向左或向右偏移移动。
88.此外,图6d以及图6e是末端执行器21a向特定方向倾斜移动的状态,其中,图6d显示上述末端执行器21a向右侧方向倾斜移动的状态,而图6e显示上述末端执行器21a向左侧倾斜移动的状态。
89.即,如图6d所示,在末端执行器21a向右侧倾斜移动时,在开始上述末端执行器21a将遮挡受光部130中的较多的部分,接下来在上述末端执行器21a通过并移动的过程中将上述受光部130中受到遮挡的部分将逐渐变小,因此从上述受光部130输出的电压将呈现出如图7e所示的电压值随着时间的流逝从较高值降低至较低值的图形。
90.此外,如图6e所示,在末端执行器21a向左侧倾斜移动时,在开始上述末端执行器21a将遮挡受光部130中的较少的部分,接下来在上述末端执行器21a通过并移动的过程中将上述受光部130中受到遮挡的部分将逐渐变大,因此从上述受光部130输出的电压将呈现出如图7f所示的电压值随着时间的流逝从较低值降低至较高值的图形。
91.因此,上述控制器200可以利用从受光部300输出的电压值高于或低于基准值,或电压值的大小沿着时间轴变大或变小,来判断末端执行器21a是否向左侧或右侧中的某一方向发生偏移以及上述末端执行器21a的倾斜方向。
92.此外,上述控制器200可以在发生末端执行器21a的偏移或倾斜时通过网络与远程终端300连接并对上述末端执行器21a的偏移发生、倾斜发生与否进行传送。
93.此外,上述控制器200可以将在末端执行器测定模块100、100'中测定到的测定值传送到远程终端300,而上述远程终端300通过对从控制器200传送过来的测定值进行分析而判断末端执行器21a的偏移发生、倾斜发生与否。
94.此外,上述控制器200可以在发生末端执行器21a的偏移或倾斜时与预先设定的临界值进行比较,并根据上述比较结果将上述末端执行器21a的维修请求信号传送到上述远程终端300,以便于管理员轻易地对其进行确认。
95.即,可以自动生成因为机械臂的链条或皮带等的老化而导致的维修请求信号并通过警报信号等进行传送,从而轻易地实现对机械臂的维护以及保养。
96.借此,可以对末端执行器的移动路径进行测定,并利用所测定的移动路径对末端执行器的扭曲进行监控,从而可以自动确认机械臂的误操作的发生。
97.此外,可以自动确认机械臂的误动作并提供给管理员,从而可以轻易地对机械臂的维护以及保养进行管理。
98.在上述内容中,通过几个实施例对本实用新型的技术思想进行了说明。
99.本实用新型所属领域技术人员可以根据本实用新型的技术思想对如上所述的实施例进行各种变形或变更。此外,即使是没有明确地进行图示或说明,但是本实用新型所属领域技术人员可以根据本实用新型的记载事项在包含本实用新型之技术思想的范围内进行多种形态的变性,而这仍然属于本实用新型的权利要求范围之内。参阅附图进行说明的上述实施例只是以对本实用新型进行说明的目的记述,本实用新型的权利要求范围并不因为如上所述的实施例而受到限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1