适用于多电堆燃料电池系统的传感器故障的分布式故障检测方法与流程
[0001]
本发明属于燃料电池技术领域,更为具体地讲,涉及一种适用于多电堆燃料电池系统的传感器故障的分布式故障检测方法。
背景技术:
[0002]
为了提高整个燃料电池系统的功率、效率和燃料利用率等,通常将多个电堆通过反应物流串联或并联构成多电堆。然而,将多个燃料电池堆通过反应物流串联,即前一个电堆的燃料/空气的输出作为下一个电堆的输入,其中一个电池堆的故障会通过反应物通道将影响传递到其他电池堆,造成故障检测困难。
[0003]
尽管燃料电池系统的故障诊断策略取得了很大的进展,但这些方法都是对系统的状态信息进行集中采集和处理,并为整个系统设计了一台集中诊断仪。对于一个大型多电池堆燃料电池系统,利用上述集中故障检测系统,其需要采集并传输每一个电池堆数据,这非常受限于系统布线、带宽和集中计算能力。
技术实现要素:
[0004]
本发明的发明目的在于:针对上述存在的问题,提供一种适用于多电堆燃料电池系统的传感器故障的分布式故障检测方法,根据本发明所构建的燃料电池堆的辨识模型,对燃料电池堆的故障进行检测。
[0005]
为实现上述发明目的,本发明的适用于多电堆燃料电池系统的传感器故障的分布式故障检测方法,包括以下步骤:
[0006]
步骤1:基于多电堆燃料电池系统模型,将燃料电池堆系统构建成多个相互互联的子系统;
[0007]
步骤2:为每个子系统设置一个局部故障检测估计器和一个自适应故障检测阈值。
[0008]
将局部故障检测估计器的输出与实际电池堆的输出间的差值作为故障检测残差信号;
[0009]
当任意子系统的故障检测残差信号超过其自适应故障检测阈值时,则判断整个系统发生故障,并启动对所有子系统的故障隔离检测;
[0010]
步骤3:为每个子系统设置一个局部故障隔离估计器和一个自适应故障隔离阈值。
[0011]
将局部故障隔离估计器的输出与实际电池堆的输出间的差值作为故障隔离残差信号;
[0012]
当任意子系统的故障隔离残差信号超过其自适应故障隔离阈值时,则判定当前子系统被隔离,且未被隔离的子系统则发生了故障。
[0013]
进一步的,步骤1中,采用的子系统模型具体为:
[0014][0015]
y
i
=c
i
x
i2
+β
i
(t-t
i
)θ
i
(t)i,j=1,...,m,i≠j
[0016]
其中,m为子系统数量;表示第i个子系统的状态x
i
的微分,且状态x
i
=[x
i1 x
i2
]
t
∈r
n
, x
i1
∈r
n-l
和x
i2
∈r
l
分别表示不可测状态和可测状态,n表示状态总数,l表示可测状态数,r表示实数域,即本申请中,在区分不可测状态和可测状态时,定义上标或下标中的“1”表示不可测状态,“2”表示可测状态;上标“t”用于表示转置;u
i
和y
i
∈r
l
分别是第i个子系统的输入变量和输出变量;x
j
和u
j
是相连子系统的状态和输入变量;a
i
和c
i
为线性矩阵和输出矩阵;ρ
i
(x
i
,u
i
)、h
ij
(x
i
,x
j
,u
i
,u
j
)和η
i
(x
i
,x
j
,u
i
,u
j
)分别是第i个子系统的非线性项、与第j个子系统的互联项和建模不确定项;β
i
(t-t
i
)θ
i
(t)表示第i个子系统的传感器故障,θ
i
(t)表示传感器偏置函数,β
i
(t-t
i
)表示阶跃函数,t和t
i
分别表示系统运行时间和第i个系统的故障发生时间。
[0017]
进一步的,步骤2中,将非线性项ρ
i
(x
i
,u
i
)、互联项h
ij
(x
i
,x
j
,u
i
,u
j
)和不确定项η
i
(x
i
,x
j
,u
i
,u
j
) 根据可测和不可测状态维度分割为:
[0018][0019][0020]
将线性矩阵a
i
分割成四个矩阵块a
i1
、a
i2
、a
i3
和a
i4
,即
[0021]
将局部故障检测估计器的设置为:
[0022][0023][0024][0025]
其中,下标d表示与故障检测估计器相关的量;表示局部故障检测估计器对第i个子系统的状态估计的微分,且其中和分别表示不可测状态和可测状态的估计(即用于故障检测估计器的不可测状态和可测状态),和l
d,i
∈r
l
×
l
分别表示第i个子系统的局部故障检测估计器的输出和估计增益;
[0026]
则故障检测残差信号
[0027]
进一步的,步骤2中,每个子系统的自适应故障检测阈值为:
[0028][0029]
其中,k
d,ip
和λ
d,ip
是正常数,且满足下标p表示第p(p∈r
l
)个分量,例如c
ip
表示输出矩阵c
i
的第p个分量,e表示自然底数,τ表示卷积运算的积分变量;
[0030]
其中,和分别为和ρ
i2
(x
i
,u
i
)的李普希茨(lipschitz)边界函数;
[0031]
χ(t)是不可测状态的局部故障检测估计器的估计误差:
[0032][0033]
其中,为不可测状态的初始估计误差,是一个正常数;c=λ
min
(o
d
)/λ
max
(p
d
),λ
min
(
·
)和λ
max
(
·
)分别表示取最小和最大特征值,p
d
=diag{p
d,i
,...,p
d,m
},p
d,i
是使局部故障检测估计器的估计误差满足李雅普诺夫稳定的对称正定矩阵,且满足
[0034]
矩阵o
d
∈r
m
×
m
被定义为:
[0035][0036]
其中,是的lipschitz常数。
[0037]
是不确定项η
i
(x
i
,x
j
,u
i
,u
j
)的边界函数,满足:
[0038]
进一步的,步骤3中,局部故障隔离估计器具体为:
[0039][0040][0041][0042][0043][0044][0045]
其中,下标s表示与故障隔离估计器相关的量;表示局部故障隔离估计器对第i个子系统的状态估计的微分,且其中和分别表示不可测状态和可测状态的估计(即用于故障隔离估计器的不可测状态和可测状态),和l
s,i
∈r
l
×
l
分别表示第i个子系统的局部故障隔离估计器的输出、传感器偏置估计和估计增益;ω
i1
∈r
(n-l)
×
l
和ω
i2
∈r
l
×
l
是一个辅助变量,故障发生后分别从零收敛到稳定值,以保证缓慢变化而不振荡,γ是一个对称正定的学习率矩阵,为投影运算限制到已知集合θ
i
;即θ
i
表示的取值范围;
[0046]
则故障隔离残差信号
[0047]
进一步的,步骤3中,每个子系统的自适应故障隔离阈值为:
[0048]
[0049]
其中,t
d
表示当前故障时刻,k
s,ip
和λ
s,ip
为正常数,满足k
i
依赖集合θ
i
的几何特性,满足χ
s
(t)是不可测状态的局部故障隔离估计器的估计误差边界,定义为:
[0050][0051]
其中,b=λ
min
(o
s
)/λ
max
(p
s
),p
s,i
是使使第i个子系统的局部故障隔离估计器的估计误差满足李雅普诺夫稳定的对称正定矩阵,且满足
[0052]
o
s
∈r
m
×
m
被定义为:
[0053][0054]
α
i
是传感器偏置的变化率边界,满足是传感器偏置的变化率边界,满足为传感器变化边界,满足 f
ip
∈r
l
为一个常向量,除了第p个元素为1外其余为0,ω
i2
是一个正常数,满足|x
s,i2
(t
d
)|≤ω
i2
。
[0055]
综上所述,由于采用了上述技术方案,本发明的有益效果是:
[0056]
(1)本发明的分布式故障故障检测方法,除系统辨识模型外,只利用输入、输出的局部测量和来自与其直接相连的子系统相关联的故障检测与隔离组件的相关通信信息,即可完成故障诊断。
[0057]
(2)在已知辨识模型不确定项边界函数的情况下,本发明对于辨识模型的不确定性具有自适应能力,从而在一定程度上扩展了本发明的运用范围。
附图说明
[0058]
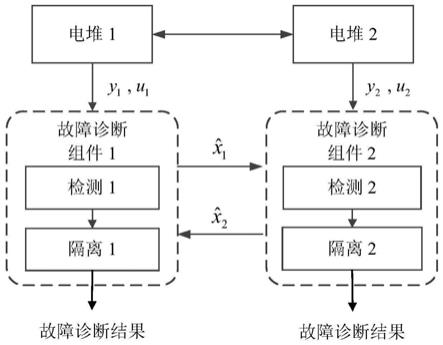
图1是本发明的适用于多电堆燃料电池系统的传感器故障的分布式故障检测方法的原理框图;
[0059]
图2是多电池堆燃料电池系统的结构示意图;
[0060]
图3是子系统1发生故障的分布式故障诊断结果,其中3(a)为子系统1的故障检测组件;3(b)为子系统2的故障检测组件;3(c)为子系统1的故障隔离组件;3(d)为子系统2的故障隔离组件;
[0061]
图4是子系统2发生故障的分布式故障诊断结果,其中4(a)为子系统1的故障检测组件;4(b)为子系统2的故障检测组件;4(c)为子系统1的故障隔离组件;4(d)为子系统2的故障隔离组件。
具体实施方式
[0062]
为使本发明的目的、技术方案和优点更加清楚,下面结合实施方式和附图,对本发明作进一步地详细描述。
[0063]
本发明的一种适用于多电堆燃料电池系统的传感器故障的分布式故障检测。首先通过模型辨识,建立燃料电池堆互联系统的子系统模型。然后,分别基于无故障运行和故障
运行的燃料电池堆模型,为每个子系统设置一个局部故障检测估计器和一个局部故障隔离估计器。它们估计的输出与实际电池堆的输出间的差值分别作为故障检测残差信号和故障隔离残差信号。最后,基于一些lipschitz有界假设,分别为每个子系统设置一个自适应故障检测阈值和一个自适应故障隔离阈值。整个故障检测过程分为2个阶段:(1)故障检测阶段,当任意子系统的故障检测残差信号超过其阈值,则判断整个系统发生故障,并启动所有子系统的故障隔离组件(即启动对所有子系统的故障隔离检测);(2)故障隔离阶段。当任意子系统的故障隔离残差信号超过其阈值,则判断该子系统被隔离。未被隔离的子系统,则意味着发生了故障。
[0064]
在本发明的适用于多电堆燃料电池系统的传感器故障的分布式故障检测方法中,对于分布式故障检测只需要与直接相连的电池堆进行少量通信,每个电池堆都有独立的故障检测组件;且分布式故障检测技术可以在燃料电池堆故障发生后,立即检测各个电池堆健康状态,使得可以及时的对损坏电池堆进行维修、更换,以此确保整个燃料电池堆系统稳定运行。
[0065]
实施例
[0066]
参见图1,在本实施例中,每个子系统的故障诊断组件包括:用于检测整个系统是否发生故障的故障检测模块(简称检测1,2,
……
)和用于判断故障具体发生在那个子系统的故障隔离模块(简称隔离1,2,
……
)。每个子系统的故障诊断组件仅利用该子系统的输入、输出和相连子系统的状态完成故障诊断。
[0067]
参考图2所给出的多电池堆燃料电池系统的具体结构,本发明的适用于多电堆燃料电池系统的传感器故障的分布式故障检测方法的具体实现步骤如下:
[0068]
s1、通过模型辨识,将燃料电池堆系统构建成2个相互互联的子系统。
[0069]
在本实施例中使用的多电堆燃料电池系统的结构如图2所示,通过系统辨识的方法,将多电池堆燃料电池系统拆解为相互互联的两个子系统:
[0070]
子系统1主要包括空气压缩机,分流器、燃料热交换器,空气热交换器,混合器,旁路阀,电池堆(燃料电池堆1)和燃烧室;子系统2只包含电池堆(燃料电池堆2)。由于本发明将通过模型辨识的方法重新构建数学模型,子系统内部部件的具体结构并不影响本发明的数学模型,故对子系统内部部件不再做具体说明。
[0071]
通过模型辨识,选取氢气摩尔分数氧气摩尔分数为不可测状态,电堆温度x
t
为可测状态。子系统1的子系统模型如下:
[0072][0073]
y1=c1x
12
+β1(t-t1)θ1(t)
[0074]
其中,表示x1的微分,是第1个子系统的状态,u1和 y1∈r1分别是第1个子系统的输入变量和输出变量;x2∈r3和u2是相连子系统2的状态和输入变量;a1和c1为线性矩阵和输出矩阵。ρ1(x1,u1)、h
12
(x1,x2,u1,u2)和η1(x1,x2,u1,u2)分别是第1个子系统的非线性项、与第2个子系统的互联项和建模不确定项;β1(t-t1)θ1(t)表示第1个子系统的传感器故障,θ1(t)是传感器偏置函数,β1(t-t1)是一个阶跃函数,t和t1表示系统运行时间和第1个子系统故障发生时间。
[0075]
子系统2的模型如下:
[0076][0077]
y1=c2x
22
+β2(t-t2)θ2(t)
[0078]
其中,表示x2的微分;是第2个子系统的状态,u2和 y2∈r1分别是第2个子系统的输入和输出变量;x1∈r3和u2是相连子系统1的状态和输入变量; a2和c2为线性矩阵和输出矩阵。ρ2(x2,u2)、h
21
(x2,x1,u2,u1)和η2(x2,x1,u2,u1)分别是第2个子系统的非线性项、与第1个子系统的互联项和建模不确定项;β2(t-t2)θ2(t)表示第2个子系统的传感器故障,θ2(t)是传感器偏置函数,β2(t-t2)是一个阶跃函数,t和t2表示系统运行时间和第 2个子系统故障发生时间。
[0079]
s2、如果一个故障在t0时刻发生在第i个子系统中,对于任意一个系统的故障检测组件的故障检测残差信号在t
d
时刻至少有一个分量p∈{1}大于阈值v
ip
,即则判定整个系统在t
d
时刻发生传感器故障。
[0080]
s2.1、为每个子系统构建局部故障检测估计器。在保证矩阵a
i4-l
d,i
稳定的条件下,选取 l
d,i
。利用局部故障检测估计器的估计输出与实际电池堆输出计算故障检测残差信号:
[0081]
s2.2、计算每个子系统的自适应故障检测阈值v
ip
(t):
[0082][0083]
其中,在满足的前提下选取k
d,ip
和λ
d,ip
;q1和q2分别定义为和选取不可测状态的初始估计误差进而计算求得c和λ
min
(p
d
)。
[0084]
s3、当故障检测模块在t
d
(t
d
≥t0)时刻检测到故障时,启用每个子系统的故障隔离模块。对于每个子系统k∈{1,2}\{q}的故障隔离组件的故障检测残差信号至少有一个分量p∈{1}超过其阈值u
kp
,即子系统k∈{1,2}\{q}将被隔离,则可以推断传感器故障发生在第q 个子系统中。
[0085]
s3.1、为每个子系统构建局部故障隔离估计器。在保证a
s4-l
s,i
的极点在左半平面前提下,取为l
s,i
。适当的选取学习率矩阵γ大小,以保证对故障大小θ
i
的估计。选择投影算符使限制到已知集合θ
i
。
[0086]
s3.2、计算每个子系统的自适应故障隔离阈值u
ip
(t):
[0087][0088]
其中,在满足的前提下选取k
s,ip
和λ
s,ip
;根据投影算符确定的故障集合θ
i
确定故障估计误差k
i
,进而求得b和λ
min
(p
s
);在本实施例中,将传感器偏置边界设置为且变化非常缓慢,即α
i
=0。根据可测状态初始估计误差选取ω
i2
;
[0089]
图3为在t=5秒时,第1个电池堆发生传感器偏置θ1=3的故障的故障诊断结果。可
以看到图3(a)、3(b)在几乎第5秒故障检测残差信号就超过其阈值,图3(c)中故障隔离残差信号一直在阈值之下,而图3(d)中故障隔离残差信号在故障发生后超过了其阈值,根据本发明的步骤2和步骤3所给出的处理方式,可以判断故障发生在第1个子系统中。
[0090]
图4为在t=4秒时,第2个电池堆发生传感器偏置θ2=1的故障的故障诊断结果。可以看到图4(a)、(b)在几乎第4秒故障检测残差信号就超过其阈值,图4(c)中故障隔离残差信号在故障发生后超过了其阈值,而图4(d)中故障隔离残差信号一直在阈值之下,根据本发明的步骤2和步骤3所给出的处理方式,可以判断故障发生在第2个子系统中。
[0091]
以上所述,仅为本发明的具体实施方式,本说明书中所公开的任一特征,除非特别叙述,均可被其他等效或具有类似目的替代特征加以替换;所公开的所有特征、或所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以任何方式组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1