储水腔体及其水量计量方法、燃料电池阳极系统和车辆与流程
1.本发明属于燃料电池技术领域,特别是涉及储水腔体及其水量计量方法、燃料电池阳极系统和燃料电池车辆。
背景技术:
2.质子交换膜燃料电池系统的水热管理是影响燃料电池系统运行的关键因素之一。一方面,质子交换膜燃料电池氢氧电化学反应的生成物是水,需要及时将生成的水排出;另外一方面,作为质子交换膜燃料电池的核心部件的质子交换膜,在一定的水合状态下才能有效传输质子,需要燃料电池系统提供适宜的温湿度环境。
3.燃料电池阳极常设有氢回流系统,即燃料电池阳极出堆氢气混合物,经由氢循环泵(或引射器)驱动回流至氢气入堆管路,与新供给的氢气混合后,进入电堆。为去除燃料电池氢气侧电堆出堆混合物中的所含的液态水滴,电堆氢气出口均设有气液分离结构或装置,该装置又称“分水器”。经分水器分离的气态混合物一支路进入氢循环泵(或引射器)另一支路连通排气阀,排气阀间断开启,主要用于稀释燃料电池系统内氮气累积。
4.液态水受重力作用汇集于储水腔,储水腔底部设有电控排水阀,该阀受燃料电池系统控制器控制,间断排水。
5.随着燃料电池技术向产品逐步转化,迫切需要燃料电池系统排水计量及控制,主要表现在如下方面:
6.精确排水控制方面的需求:
7.如若排水阀开启时间过短,排水不充分,会造成储水腔内水位过高,一方面会影响分水器的气液分离效率,另一方面储液室内液态水淹没燃料电池系统阳极出口,致使系统不能正常工作。如若排水阀开启时间过长,排水阀排出水后仍然保持开启状态,氢腔内的高压气体会经排水阀排出,该种情况不仅会造成氢气的浪费,还会导致尾排气体中氢浓度超标。
8.燃料电池系统水平衡调控需求:
9.燃料电池系统的水平衡包括:系统产水量、阴极入口水量、阴极出口水量、阳极排水量等主要方面。因阳极排水量难以直接测量,现有技术中一直把阳极排水量作为未知量,通过整个燃料电池系统水平衡反推阳极排水。燃料电池系统的水平衡过程与温度、压力、湿度等因素耦合,同时质子交换膜在阴极和阳极的水传递系数与湿度高度耦合,间接方法获得的阳极水量的精度难以保证,由此造成燃料电池系统水平衡调控受限。
10.燃料电池系统排水量的计量实施难度较大:
11.燃料电池系统的水量在燃料电池系统的阴与阳间相互传递;并且燃料电池系统中水以气液两相形式存在,受温度、压力等参数的影响气液两相之间相互转化。燃料电池系统中,流量计直接测量实施难度大。
12.车用燃料电池系统应用于多种搭载安装方向、应用于多种路况,通常车辆在不同倾斜角度下液位变化大,通过容积计量方法实施受限。
13.现有技术中,专利cn102569848a中提供了用于燃料电池的相对湿度和冷凝水的控制器,以及使用该控制器控制冷凝水排放的方方法。专利cn105609839b燃料电池用排水装置、燃料电池系统及其控制方法。以上专利主要通过系统的水平衡入手,通过系统参数(比如空气侧湿度、氢气侧湿度、水含量、工况等参数)预估冷凝水、控制冷凝水的排放。
14.专利cn111180766a用于燃料电池的冷凝水排放控制系统及控制方法,其基于估算的化学反应量打开排水阀,并在排水阀打开的状态下,基于通过燃料供应管线向燃料电池堆供应燃料的状态,控制排水阀关闭。
15.专利cn105633433b,移动体中的排水的方法及燃料电池系统。该方法增加倾斜状态检测工序,检测移动体相对于水平面的倾斜状态,进而设定与其倾斜状态相应的排气、排水方案。
16.专利cn111293337a专利中提出一种用于甲醇燃料电池储液器内液位检测的方法。通过增设三轴电子陀螺仪检测装置工作时的倾斜角度,采用线性霍尔感应器通过感应磁芯浮球的位置来知晓储液腔内某一方向的液位,进一步通过算法得知储液腔内的液体体积。
17.现有技术中,燃料电池排水多采用间接方法获取排水需求,或者采用排水后的信息反馈判断判断排水的结束状态。间接方法牵涉整个燃料电池系统的水平衡,涉及参数多、精度受限、程序复杂。
18.现有技术中,提出移动体中的排水方法,排水计量受依赖于车辆或装置的倾斜状态,增设倾斜检测工序或三轴陀螺仪瞬时获取车辆的倾斜角度,进一步确定排水量。车用燃料电池系统涉及各个倾斜方向、多种倾斜角度,实施过程中影响变量较多。
技术实现要素:
19.本发明的目的在于提供一种储水腔体及其水量计量方法、燃料电池阳极系统和燃料电池车辆,以克服现有技术的缺陷。
20.为实现上述技术目的,达到上述技术效果,本发明公开了一种储水腔体,电堆阳极出口通过分水器与储水腔体相连,储水腔体由顶部储水腔和底部储水腔通过锥形过渡腔体连接形成,顶部储水腔通过连通水腔与电堆阳极连接口和混合气出口连接,底部储水腔上开设有排水口,储水腔体内贯穿设置有液位传感器。
21.进一步的,顶部储水腔为球形,底部储水腔为球形或方形,锥形过渡腔体锥角α角度为35
°-
40
°
。
22.进一步的,液位传感器为电容液位传感器。
23.进一步的,电容液位传感器为同心圆柱式电容器,同心圆柱式电容器测量储水腔体内同心圆柱空间的液位。
24.进一步的,液位传感器的轴线与顶部储水腔的中心点p、底部储水腔的中心点q的连线pq采用同轴布置,且p、q点均在液位传感器液位量程范围之内。
25.本发明还公开了一种储水腔体水量计量方法,计量方法如下:
26.储水腔内储水速率与q储液容积、h液位高度、θ倾斜角度、t测量时间相关,其关系式如式(1)所示:
27.28.同时,储水腔内储水速率与q
in
储液速率、q
out
排液速率相关,其关系如式(2)所示:
[0029][0030]
进一步的,计量方法具体如下:
[0031]
s1:制作储液容积q(h,θ)map图;
[0032]
s2:制作储液容积偏差率map图;
[0033]
s3:制作储液容积与液位高度变化率(h,θ)map图;
[0034]
s4:依据p点液位对应时刻及储液容积、q点液位对应时刻及储液容积确定平均排液速率依据瞬时液位确定对应倾斜角度和瞬时储液速率;
[0035]
其中,为储液容积与液位高度变化率、为平均排液速率。
[0036]
进一步的,平均排液速率
[0037]
其中,δq
pq
=q
p-qq、δt
pq
=t
p-tq、q
p
为p点储液容积、qq为q点储液容积、t
p
为p点对应的测量时间、tq为q点对应的测量时间。
[0038]
本发明还公开了一种燃料电池阳极系统,燃料电池阳极系统包括有上述储水腔体,还包括有电堆阳极、氢回流驱动装置、分水器,电堆阳极设置有电堆阳极入口和电堆阳极出口,电堆阳极出口腔两相气液混合物经分水器实现气液分离,分离后的气体混合物经氢回流驱动装置流向电堆阳极入口,储水腔体与分水器相连,储水腔体底部开设有排水口,排水口上连接设置有电控排水阀。
[0039]
进一步的,还包括有系统控制器,系统控制器与液位传感器、电控排水阀电气连接,并采集液位传感器的信号,并控制电控排水阀的开启和关闭。
[0040]
本发明还公开了一种燃料电池车辆,该燃料电池车辆采用上述燃料电池阳极系统。
[0041]
本发明具有以下有益效果:
[0042]
1.本发明实现燃料电池系统精确排水控制,依据燃料电池系统的储液容积需求,设计储液腔体的结构,设置排水阀排液的起始点位于p点、排水阀排液的结束点设置于q点,由此获得排水量不受倾角的影响,适用于控制排水阀精确排水。
[0043]
2.本发明燃料电池阳极液位计量采用电容式液位传感器,用于液位的连续测量。其原理是同心圆柱式电容器,液位变化引起等效介电常数变化,从而使电容器的电容量变化,进一步将电容的变化量(即液位的变化量)转换成标准的电信号输出。针对燃料电池系统,其阳极液体为冷凝水,气态混合物为氢气氮气等,其液态物性与气态物性的介电常数差异约80倍,电容液位测量精度较高。其次,电容式液位传感器不需要浮球,没有机械误差,适用于狭小安装空间,动态范围大、响应速度快。除此而外,电容液位传感器测量同心圆柱空间内的液位,该液位与整体储液室底部连通,由此削弱瞬时倾斜晃动及高速运动的瞬时影响,此点尤其适用于车用系统中。
[0044]
3.本发明依据储液容积特性及液位高度瞬态变化,可估计系统倾斜角度范围。基于测量直接获得燃料电池系统阳极储液速率,为燃料电池系统的水平衡提供直接参数。
附图说明
[0045]
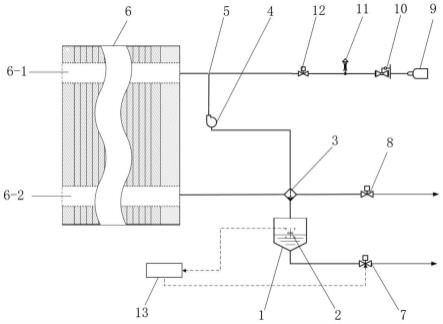
图1燃料电池阳极系统架构。
[0046]
图2本发明实施例1中的储液腔体结构特征及其液位传感器位置关系。
[0047]
图3储液腔体竖直状态与倾斜状态相对关系。
[0048]
图4储液容积q(h,θ)map图。
[0049]
图5储液容积偏差率map图。
[0050]
图6储液容积与液位高度变化率(h,θ)map图。
[0051]
图7排水控制及储液速率确定流程图。
[0052]
图8本发明实施例2中的储液腔体结构特征及其液位传感器位置关系。
[0053]
主要部件符号说明:
[0054]
1.储水腔体,2.液位传感器,3.分水器,4.氢回流驱动装置,5.混合口,6.电堆阳极,7.电控排水阀,8.电控排气阀,9.储氢装置,10.减压阀,11.安全阀,12.氢气控制阀,13.系统控制器。
[0055]
1a.电堆阳极连接口,1b.混合气出口,1c.连通水腔,1d.顶部储水腔,1e.锥形过渡腔体,1f.底部储水腔,1g.排水口。
[0056]
6-1.电堆阳极入口,6-2.电堆阳极出口。
具体实施方式
[0057]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。
[0058]
实施例1
[0059]
如图2所示,本发明公开了一种储水腔体,电堆阳极出口6-2通过分水器3与储水腔体1相连,储水腔体1由顶部储水腔1d和底部储水腔1f通过锥形过渡腔体1e连接形成,顶部储水腔1d通过连通水腔1c与电堆阳极连接口1a和混合气出口1b连接,底部储水腔1f上开设有排水口1g并连接设置有电控排水阀7,储水腔体1内贯穿设置有液位传感器2。
[0060]
其中,顶部储水腔1d与底部储水腔1f均为球形,液位传感器2的轴线与顶部储水腔1d的圆心点p、底部储水腔1f的圆心点q的连线pq采用同轴布置,且p、q点均在液位传感器2的液位量程范围之内。
[0061]
其中,锥形过渡腔体1e的锥角α角度为35
°-
40
°
,液位传感器2为电容液位传感器,电容液位传感器为同心圆柱式电容器,同心圆柱式电容器测量储水腔体1内同心圆柱空间的液位。
[0062]
储水腔体1设置有液位传感器2的结构竖直状态与倾斜状态相对关系如图3所示。在系统倾斜α角度下(与锥形过渡腔体1e的锥角α角相同),液位传感器2所对应的液位高度qp’与竖直液位高度qp相等。在排水低点q位置所测液位对应容积同样基本不受倾斜角度的影响。
[0063]
如图4所示,储液容积q(h,θ)map图(其中:储液容积q(ml)、液位高度h(mm)、倾斜角度θ(deg))。由图可以看出,储液容积110ml时,对应于图2储液腔体结构中的p点位置,结果显示该点所对应的测试液位高度约为60mm,其不随倾角θ变化。同时在储液容积10ml时,对应于图2储液腔体结构中的q点位置,所对应的测试液位高度约为10mm,该液位高度随倾角θ
变化非常小。
[0064]
如图5所示,储液容积偏差率map图(其中:倾斜状态与竖直状态储液容积偏差(%)、液位高度h(mm)、倾斜角度θ(deg))。由此设计倾斜状态与竖直状态储液容积偏差(%)高于5%的区域处液位高度范围:15mm-53mm,并且倾斜角度范围16
°-
40
°
,两者的叠加区域。
[0065]
如图6所示,储液容积与液位高度变化率(h,θ)map图(其中:储液容积与液位高度变化率(ml/mm)、液位高度h(mm)、倾斜角度θ(deg))。
[0066]
基于图6所示特性图,可确定:
[0067]
储水腔内储水速率与q储液容积、h液位高度、θ倾斜角度、t测量时间相关,其关系式如式(1)所示:
[0068][0069]
同时,储水腔内储水速率与q
in
储液速率、q
out
排液速率相关,其关系如式(2)所示:
[0070][0071]
根据燃料电池的工作特性,做如下简化:
[0072]
1、排液阶段经历的时间较短,较排液速率q
out
,储液速率q
in
较小;排液阶段忽略储液的影响。
[0073]
2、排液阶段经历的时间较短,排液过程中θ倾斜角度不变,排气阀属开关阀,排液过程中压力变化较小,排液过程接近恒定排液速率。
[0074]
3、储水阶段做如下简化:储水阶段的倾角θ与排水阶段保持不变。
[0075]
基于以上假设,排水控制及储液速率确定流程图如图7所示,计量方法具体如下:
[0076]
s1:制作储液容积q(h,θ)map图;
[0077]
s2:制作储液容积偏差率map图;
[0078]
s3:制作储液容积与液位高度变化率(h,θ)map图;
[0079]
s4:依据p点液位对应时刻及储液容积、q点液位对应时刻及储液容积确定平均排液速率依据瞬时液位确定对应倾斜角度和瞬时储液速率;
[0080]
其中,为储液容积与液位高度变化率、为平均排液速率。
[0081]
进一步的,平均排液速率
[0082]
其中,δq
pq
=q
p-qq、δt
pq
=t
p-tq、q
p
为p点储液容积、qq为q点储液容积、t
p
为p点对应的测量时间、tq为q点对应的测量时间。
[0083]
本发明还公开了一种燃料电池阳极系统,如图1所示,燃料电池阳极系统包括有上述储水腔体,还包括有电堆阳极6、氢回流驱动装置4、分水器3,电堆阳极6设置有电堆阳极入口6-1和电堆阳极出口6-2,电堆阳极出口6-2两相气液混合物经分水器3实现气液分离,分离后的气体混合物经氢回流驱动装置4流向电堆阳极入口6-1,储水腔体1与分水器3相
连。
[0084]
其中,还包括有系统控制器13,系统控制器13与液位传感器2、电控排水阀7电气连接,并采集液位传感器2的信号,并控制电控排水阀7的开启和关闭。
[0085]
其中,电堆阳极入口6-1包括混合口5以及依次连接的储氢装置9、减压阀10、安全阀11和氢气控制阀12,氢回流驱动装置4和氢气控制阀12经由混合口5连接至电堆阳极入口6-1。本发明中,储氢装置10可以为氢瓶。
[0086]
其中,分水器3的下游设置电控排气阀8,其用于间断排出阳极混合气,防止氮气累积。
[0087]
实施例2
[0088]
本实施例与实施例1的储水腔体结构大致相似,考虑到底部球形储水腔容积较小,对系统测试影响不敏感,简化底部球形腔体为方形,如图储液腔体结构特征及其液位传感器位置关系如图8所示。
[0089]
在本发明的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
[0090]
为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
[0091]
此外,需要说明的是,使用“第一”、“第二”等词语来限定零部件,仅仅是为了便于对相应零部件进行区别,如没有另行声明,上述词语并没有特殊含义,因此不能理解为对本发明保护范围的限制。
[0092]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1