一种线缆线束沾锡梳理装置的制作方法
1.本实用新型涉及线束绞线技术领域,尤其涉及一种线缆线束沾锡梳理装置.
背景技术:
2.产品线束的芯线在生产中,因为剥离切断等工序会使线束的芯线弯曲,位置偏差等情况发生。会使后面的加工工序无法进行,需要人工进行检测、梳理使线束的芯线笔直,间距相等,因为芯线间距小,数量多,人工梳理耗时长,质量不稳定,影响最终产品的生产效率和合格率。
3.现提供本实用新型一种线缆线束沾锡梳理装置,本自动装置plc 电气控制,结构简单,梳理速度快质量稳定,确保产品的生产效率和合格率,并在5g线束自动裁切焊接设备自动化设备中进行自动化生产。
技术实现要素:
4.本实用新型所要解决的技术问题是针对现有技术中存在的不足先提供一种线缆线束沾锡梳理装置,本自动装置plc电气控制,结构简单,梳理速度快质量稳定,确保产品的生产效率和合格率,并在 5g线束自动裁切焊接设备自动化设备中进行自动化生产。
5.为了实现上述目的,本实用新型采用如下技术方案:
6.一种线缆线束沾锡梳理装置包括安装底板;上下滑动底板;滑块安装板;短滑动支撑板;长滑动支撑板;凸轮滑动板;转轴;凸轮;轴承固定板;支撑板a;转轴支撑板;电机支撑板;梳理板绝缘板;梳理支撑块;上盖板;金属垫圈;梳理板;前后滑动安装板;左右滑动安装板;整体支撑;左右滑动连接板;气缸安装板;浮动接头;左右滑动驱动电机;金属垫圈;低组装式滚珠直线导轨;连轴器;单轴机器人;前后移动气缸;带肩轴承;微小型宽幅直线导轨;伺服电机;轴承座;流速调节阀;
7.所述的单轴机器人和整体支撑固定连接;所述的左右滑动驱动电机和左右滑动连接板分别和单轴机器人固定连接,并且左右滑动驱动电机与单轴机器人用连轴器固定连接电机轴和单轴机器人的输入轴;
8.所述的左右滑动安装板和低组装式滚珠直线导轨、左右滑动连接板固定连接;
9.所述的整体支撑和低组装式滚珠直线导轨固定连接;所述的整体支撑和金属垫圈固定连接,并用金属垫圈和低组装式滚珠直线导轨对齐侧边,到此完成下平台部分,并与整体支撑之间滑动配合,到此实现左右滑动驱动电机驱动左右滑动做左右滑动运动;
10.所述的另两组低组装式滚珠直线导轨与左右滑动安装板固定连接,并与前后滑动安装板固定连接,完成对自身的支撑和与左右滑动安装板之间的滑动配合;
11.所述的气缸安装板分别与左右滑动安装板、气缸固定连接;
12.所述的前后移动气缸和浮动接头固定连接;
13.所述的浮动接头放入前后滑动安装板的槽口中,限制位移,到此实现前后移动气缸驱动前后滑动安装板做前后滑动运动;
14.所述的安装底板和前后滑动安装板固定连接;所述的伺服电机和电机支撑板固定连接,并让电机轴穿过电机支撑板上的通孔;
15.所述的电机支撑板和前后滑动安装板固定连接,由此实现伺服电机的固定和支撑;
16.所述的伺服电机的电机轴和连轴器固定连接;
17.所述的连轴器和转轴固定连接,转轴与两个凸轮固定连接,到此实现伺服电机到凸轮的动力传递;
18.所述的转轴支撑板固定连接在安装底板上,轴承座固定连接在转轴支撑板上,并让轴承座穿过转轴支撑板上的通孔;
19.所述的转轴穿过轴承座;
20.所述的上下滑动底板固定连接在安装底板上,轴承固定板和上下滑动底板固定连接;
21.所述的带肩轴承嵌入轴承固定板的通孔中,转轴穿过带肩轴承并顶死;
22.所述的转轴与带肩轴承、轴承座可转动配合,并用金属垫环隔开各部件减少摩擦力,到此实现转轴的支撑并使其受伺服电机驱动带动凸轮自由旋转运动;
23.所述的凸轮与凸轮滑动板滑动连接;
24.所述的凸轮滑动板分别与短滑动支撑板和长滑动支撑板固定连接;所述的短滑动支撑板和长滑动支撑板再分别和滑块安装板固定连接,到此实现转轴和滑块安装板之间的动力传递,并实现滑块安装板上下往复直线运动;
25.所述的上下滑动底板上与微小型宽幅直线导轨固定连接,滑块安装板与微小型宽幅直线导轨固定连接,到此实现伺服电机和滑块安装板之间的动力传递,并实现滑块安装板上下往复直线运动;
26.所述的梳理板绝缘板与滑块安装板固定连接,并实现绝缘功能;
27.所述的梳理支撑块和梳理板绝缘板、梳理板固定连接;
28.所述的支撑板a和安装底板固定连接,上盖板和支撑板a固定连接,形成箱体。
附图说明:
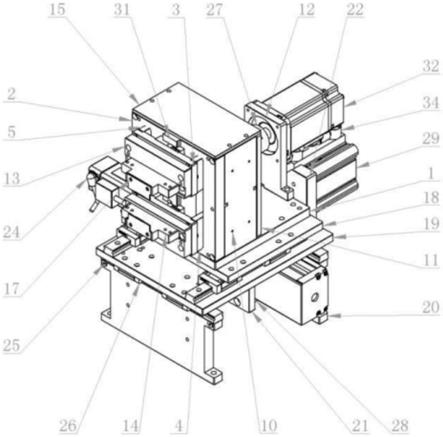
29.图1线缆线束沾锡梳理装置整体结构示意图;
30.图2线缆线束沾锡梳理装置整体正视图;
31.如图:1
‑
安装底板;2
‑
上下滑动底板;3
‑
滑块安装板;4
‑
短滑动支撑板;5
‑
长滑动支撑板;6
‑
凸轮滑动板;7
‑
转轴;8
‑
凸轮;9
‑
轴承固定板;10
‑
支撑板a;11
‑
转轴支撑板;12
‑
电机支撑板;13
‑
梳理板绝缘板;14
‑
梳理支撑块;15
‑
上盖板;16
‑
金属垫圈a;17
‑
梳理板; 18
‑
前后滑动安装板;19
‑
左右滑动安装板;20
‑
整体支撑;21
‑
左右滑动连接板;22
‑
气缸安装板;23
‑
浮动接头;24
‑
左右滑动驱动电机; 25
‑
金属垫圈b;26
‑
低组装式滚珠直线导轨;27
‑
连轴器;28
‑
单轴机器人;29
‑
前后移动气缸;30
‑
带肩轴承;31
‑
微小型宽幅直线导轨; 32
‑
伺服电机;33
‑
轴承座;34
‑
流速调节阀;
具体实施方式
32.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行
清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
33.一种线缆线束沾锡梳理装置包含安装底板1;上下滑动底板2;滑块安装板3;短滑动支撑板4;长滑动支撑板5;凸轮滑动板6;转轴7;凸轮8;轴承固定板9;支撑板a10;转轴支撑板11;电机支撑板12;梳理板绝缘板13;梳理支撑块14;上盖板15;金属垫圈a 16;梳理板17;前后滑动安装板18;左右滑动安装板19;整体支撑 20;左右滑动连接板21;气缸安装板22;浮动接头23;左右滑动驱动电机24;金属垫圈b25;低组装式滚珠直线导轨26;连轴器27;单轴机器人28;前后移动气缸29;带肩轴承30;微小型宽幅直线导轨31;伺服电机32;轴承座33;流速调节阀34;
34.所述的单轴机器人28和整体支撑固定连接;
35.所述的左右滑动驱动电机24和左右滑动连接板21分别和单轴机器人 28固定连接,并且左右滑动驱动电机24与单轴机器人28用连轴器 27固定连接电机轴和单轴机器人28的输入轴;
36.所述的左右滑动安装板19和低组装式滚珠直线导轨26、左右滑动连接板21固定连接;
37.所述的整体支撑20和低组装式滚珠直线导轨26固定连接;所述的整体支撑20和金属垫圈b25固定连接,并用金属垫圈b25和低组装式滚珠直线导轨26
‑
对齐侧边,到此完成下平台部分,并与整体支撑之间滑动20
‑
配合,到此实现左右滑动驱动电机24驱动左右滑动19做左右滑动运动;
38.所述的另两组低组装式滚珠直线导轨26与左右滑动安装板19固定连接,并与前后滑动安装板18固定连接,完成对自身的支撑和与左右滑动安装板19之间的滑动配合;
39.所述的气缸安装板22分别与左右滑动安装板19、前后移动气缸29 固定连接;
40.所述的前后移动气缸29和浮动接头23固定连接;
41.所述的浮动接头23放入前后滑动安装板18的槽口中,限制位移,到此实现前后移动气缸29驱动前后滑动安装板18做前后滑动运动;所述的安装底板1和前后滑动安装板18固定连接;所述的3伺服电机32和电机支撑板12固定连接,并让电机轴穿过电机支撑板12上的通孔;
42.所述的电机支撑板12和前后滑动安装板18固定连接,由此实现伺服电机32的固定和支撑;
43.所述的伺服电机32的电机轴和连轴器27固定连接;
44.所述的连轴器和转轴7固定连接,转轴7与两个凸轮8固定连接,到此实现伺服电机32到凸轮8的动力传递;
45.所述的转轴支撑板11固定连接在安装底板1上,轴承座33固定连接在转轴支撑板11上,并让轴承座33穿过转轴支撑板11上的通孔;所述的转轴7穿过轴承座33;
46.所述的上下滑动底板2固定连接在安装底板1上,轴承固定板9和上下滑动底板2固定连接;
47.所述的带肩轴承30嵌入轴承固定板9的通孔中,转轴穿过带肩轴承30并顶死;
48.所述的7
‑
转轴与带肩轴承30、轴承座33可转动配合,并用金属垫环隔开各部件减
少摩擦力,到此实现转轴7的支撑并使其受伺服电机 32驱动带动凸轮8自由旋转运动;
49.所述的8凸轮与凸轮滑动板6滑动连接;
50.所述的凸轮滑动板6分别与短滑动支撑板4和长滑动支撑板5固定连接;
51.所述的短滑动支撑板4和长滑动支撑板5再分别和滑块安装板3固定连接,到此实现转轴7和滑块安装板3之间的动力传递,并实现滑块安装板上下往复直线运动;
52.所述的上下滑动底板2上与微小型宽幅直线导轨31固定连接,滑块安装板3与微小型宽幅直线导轨31固定连接,到此实现伺服电机32 和滑块安装板3之间的动力传递,并实现滑块安装板上下往复直线运动;
53.所述的梳理板绝缘板13与滑块安装板3固定连接,并实现绝缘功能;所述的梳理支撑块14和梳理板绝缘板13、梳理板17固定连接;所述的支撑板a10和安装底板1固定连接,上盖板15和支撑板a10 固定连接,形成箱体。
54.本实施例的一个具体应用为:
55.所有的驱动电机和驱动气缸原点复位。
56.1.左右滑动安装板19通过低组装式滚珠直线导轨26实现和整体支撑20之间的左右直线滑动,并支撑固定上部分装置机构。
57.左右滑动驱动电机24提供驱动力,带动连轴器27和与其固定的单轴机器人28的丝杠转动.
58.2.单轴机器人28又带动左右滑动安装板19及上面的装置机构做左右直线滑动,完成左右对齐产品的目的。
59.伺服电机32提供圆周转动的输入力,带动连轴器27和与其固定连接的转轴7转动。
60.3.转轴7带动两个反向安装的凸轮8转动,凸轮8转动使与其滑动连接的凸轮滑动板6做相反的上下直线往复运动。
61.4.滑块安装板3通过微小型宽幅直线导轨31实现和长滑动支撑板5 之间的上下直线滑动,并支撑固定梳理支撑块14和梳理板17。凸轮滑动板6带动固定连接的短滑动支撑板4或长滑动支撑板5再将动力传递到滑块安装板3,并最终传递到梳理支撑块14和梳理板17,实现两个梳理板17做相反的上下直线往复运动,使伺服电机32转动,使两个梳理板张开。
62.5.前后移动气缸29驱动前后滑动安装板18向前滑动运动。带动上部分装置向前滑动,完成进料动作。
63.6.伺服电机32转动,使两个梳理板17闭合,前后移动气缸29带动上部分装置向后滑动,完成梳理动作。
64.7.伺服电机32转动,使两个梳理板17张开,完成出料动作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1