搬送异常预测系统的制作方法
1.本公开关于一种搬送异常预测系统。
背景技术:
2.在半导体制造装置中必须处理基板。但是,装置长时间运转时,因为零件磨损及设备偏差而发生处理错误。发生处理错误时,装置停止,造成生产性降低,或是可能基板本身破损。
3.在日本专利第6325325号公报中提出一种系统,将晶片处理设备在运转中的传感器的输出与晶片处理设备在运转前位置对齐时所存储的传感器的输出比较,其差超过一定的阈值时,判断为从位置对齐脱离。
4.发明要解决的问题
5.但是,在日本专利第6325325号公报的系统中,当晶片处理设备在运转中的传感器的输出与运转前位置对齐时所存储的传感器的输出的差超过一定的阈值时判断为异常,以简单的办法来进行异常的检测,检测概率不高。
技术实现要素:
6.希望提供可提高搬送异常的检测概率的搬送异常预测系统。
7.本公开的一个方式的搬送异常预测系统具备推定部,该推定部具有完成学习模型,该完成学习模型对包含从设于基板搬送部的多个传感器分别在过去的基板搬送时所输出的传感器数据的数据集与该基板搬送时的搬送异常度的关系性进行了机器学习,该推定部将包含从所述多个传感器分别在新的基板搬送时所输出的传感器数据的数据集作为输入,推定该新的基板搬送时的搬送异常度并输出。
附图说明
8.图1是表示一种实施方式的基板处理装置的概略性构成图。
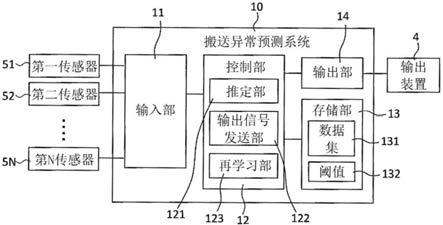
9.图2是表示一种实施方式的搬送异常预测系统的构成块图。
10.图3是表示正常基板搬送时的传感器数据的一例图。
11.图4是用于说明发生搬送异常时的基板搬送部的图。
12.图5是表示发生搬送异常时的传感器数据的一例图。
13.图6是用于说明第一方式中的完成学习模型的构成模式图。
14.图7是用于说明第二方式中的完成学习模型的构成模式图。
15.图8是用于说明第三方式中的完成学习模型的构成模式图。
16.图9是用于说明第四方式中的完成学习模型的构成模式图。
17.图10是用于说明第五方式中的完成学习模型的构成模式图。
18.图11是用于说明第六方式中的完成学习模型的构成模式图。
19.图12是用于说明第七方式中的完成学习模型的构成模式图。
20.图13是用于说明第八方式中的完成学习模型的构成模式图。
21.图14是用于说明一种实施方式的搬送异常预测方法的一例的流程图。
具体实施方式
22.实施方式的第一方式的搬送异常预测系统具备推定部,
23.该推定部具有完成学习模型,该完成学习模型对包含从设于基板搬送部的多个传感器分别在过去的基板搬送时所输出的传感器数据的数据集与该基板搬送时的搬送异常度的关系性进行了机器学习,该推定部将包含从所述多个传感器分别在新的基板搬送时所输出的传感器数据的数据集作为输入,推定该新的基板搬送时的搬送异常度并输出。
24.采用此种方式时,推定部通过使用对包含过去在基板搬送时的传感器数据的数据集与在该基板搬送时的搬送异常度的关系性进行了机器学习的完成学习模型,对于包含在新的基板搬送时的传感器数据的数据集,可从多个指标数据综合,来推定在该新的基板搬送时的搬送异常度并输出。由此,与过去在基板搬送时传感器的输出与搬送基板前的位置对齐时所存储的传感器的输出的差超过一定阈值时判断为异常的过去方式比较,可提高搬送异常的检测概率。此外,通过使用完成学习模型,可利用过去方式不易处理的设备的振动、声音、图像数据等作为传感器数据。
25.实施方式的第二方式的搬送异常预测系统,如第一方式的搬送异常预测系统,
26.其中所述多个传感器是由振动传感器、声音传感器、图像传感器、影像传感器、温度传感器、设备移动速度传感器、设备动作转矩传感器、设备平行度传感器的中的一种或两种以上构成。
27.实施方式的第三方式的搬送异常预测系统,如第一或第二方式的搬送异常预测系统,
28.其中进一步具备输出信号发送部,该输出信号发送部将通过所述推定部输出的所述搬送异常度与预定的阈值比较,在所述搬送异常度超过所述阈值的情况下,将用于输出维修通知及/或警报的输出信号发送至输出装置。
29.实施方式的第四方式的搬送异常预测系统,如第一至第三方式中任何一个方式的搬送异常预测系统,
30.其中所述推定部将包含新的基板搬送时从搬送开始至当前为止的传感器数据的数据集作为输入,推定在该新的基板搬送时的搬送异常度并输出。
31.实施方式的第五方式的搬送异常预测系统,如第一至第三方式中任何一个方式的搬送异常预测系统,
32.其中所述推定部将包含新的基板搬送时从搬送开始至搬送结束为止的传感器数据的数据集作为输入,推定在该新的基板搬送时的搬送异常度并输出。
33.实施方式的第六方式的搬送异常预测系统,如第一至第三方式中任何一个方式的搬送异常预测系统,
34.其中所述推定部将包含多片新的基板搬送时从最初的基板开始搬送起至最后的基板搬送结束为止的传感器数据的数据集作为输入,推定在该多片新的基板搬送时的搬送异常度并输出。
35.实施方式的第七方式的搬送异常预测系统,如第一至第六方式中任何一个方式的
搬送异常预测系统,
36.其中进一步具备再学习部,该再学习部将包含所述新的基板搬送时所输出的传感器数据的数据集作为教师数据,而使所述完成学习模型进行再学习。
37.实施方式的第八方式的搬送异常预测系统,如第一至第七方式中任何一个方式的搬送异常预测系统,
38.其中所述数据集进一步包含在该基板搬送时的设备动作时间、维修后经过时间、基板处理部的零件使用时间中的至少一个时间信息。
39.实施方式的第九方式的搬送异常预测系统,如第一至第八方式中任何一个方式的搬送异常预测系统,
40.其中所述完成学习模型对在包含过去的基板搬送时的传感器数据的数据集中附带了从该基板搬送时至发生搬送异常时为止的剩余时间或剩余搬送次数的教师数据进行机器学习,所述推定部将包含新的基板搬送时的传感器数据的数据集作为输入,基于通过所述完成学习模型预测的所述剩余时间或剩余搬送次数,来推定所述搬送异常度并输出。
41.实施方式的第十方式的搬送异常预测系统,如第一至第八方式中任何一个方式的搬送异常预测系统,
42.其中所述完成学习模型将包含过去的正常基板搬送时的传感器数据的数据集作为教师数据,以k近邻算法进行机器学习,所述推定部将包含新的基板搬送时的传感器数据的数据集作为输入,基于通过所述完成学习模型计算的至k近邻的距离,来推定所述搬送异常度并输出。
43.实施方式的第十一方式的搬送异常预测系统,如第一至第八方式中任何一个方式的搬送异常预测系统,
44.其中所述完成学习模型将包含过去的正常基板搬送时的传感器数据的数据集作为教师数据,并以lstm(long short-term memory/长短期记忆)进行机器学习,所述推定部将包含在新的搬送基板前实际的传感器数据的数据集作为输入,根据包含该新的搬送基板前实际的传感器数据的数据集,对包含通过所述完成学习模型预测的该新的基板搬送时的传感器数据的数据集、与包含该新的基板搬送时的实际传感器数据的数据集的乖离进行计算,并基于该乖离来推定所述搬送异常度并输出。
45.实施方式的第十二方式的搬送异常预测系统,如第一至第八方式中任何一个方式的搬送异常预测系统,
46.其中所述完成学习模型对在包含过去的基板搬送时的传感器数据的数据集附加该基板搬送时是否发生搬送异常的标签的教师数据进行机器学习,所述推定部将包含新的基板搬送时的传感器数据的数据集作为输入,基于通过所述完成学习模型预测的发生搬送异常时的概率来推定所述搬送异常度并输出。
47.实施方式的第十三方式的搬送异常预测系统,如第十二方式的搬送异常预测系统,
48.其中所述完成学习模型对在包含过去的基板搬送时的传感器数据的数据集附加该基板搬送时是否发生搬送异常的标签,并且当发生搬送异常时,附加搬送异常的发生原因的标签的教师数据进行机器学习,所述推定部将包含新的基板搬送时的传感器数据的数据集作为输入,基于通过所述完成学习模型对各个搬送异常的发生原因进行预测的发生搬
送异常时的概率,推定各个搬送异常的发生原因的所述搬送异常度并输出。
49.实施方式的第十四方式的搬送异常预测系统,如第一至第十三方式中任何一个方式的搬送异常预测系统,
50.其中所述推定部具有多个完成学习模型,并基于所述多个学习完成模型的预测的组合,来推定所述搬送异常度并输出。
51.实施方式的第十五方式的基板处理装置具备:基板搬送部;及如第一至第十四方式中任何一个方式的搬送异常预测系统。
52.实施方式的第十六方式的搬送异常预测方法,
53.是计算机执行的搬送异常预测方法,包含以下步骤:
54.使用完成学习模型,该完成学习模型对包含从设于基板搬送部的多个传感器分别在过去的基板搬送时所输出的传感器数据的数据集与该基板搬送时的搬送异常度的关系性进行了机器学习,将包含从所述多个传感器分别在新的基板搬送时所输出的传感器数据的数据集作为输入,推定该新的基板搬送时的搬送异常度并输出。
55.实施方式的第十七方式的搬送异常预测程序,
56.使计算机执行以下步骤:
57.使用对包含从设于基板搬送部的多个传感器分别在过去的基板搬送时所输出的传感器数据的数据集与该基板搬送时的搬送异常度的关系性进行了机器学习的完成学习模型,将包含从所述多个传感器分别在新的基板搬送时所输出的传感器数据的数据集作为输入,推定该新的基板搬送时的搬送异常度并输出。
58.实施方式的第十八方式的计算机可读取的记录介质,
59.是非暂时性(non-transitory)记录用于使计算机执行以下步骤的搬送异常预测程序,
60.使用对包含从设于基板搬送部的多个传感器分别在过去的基板搬送时所输出的传感器数据的数据集与该基板搬送时的搬送异常度的关系性进行了机器学习的完成学习模型,将包含从所述多个传感器分别在新的基板搬送时所输出的传感器数据的数据集作为输入,推定该新的基板搬送时的搬送异常度并输出。
61.实施方式的第十九方式的完成学习模型是调谐后的类神经网络系统,
62.具有:输入层;一个或二个以上的中间层,该中间层连接于输入层;及输出层,该输出层连接于中间层,该完成学习模型将包含从设于基板搬送部的多个传感器分别在过去的基板搬送时所输出的传感器数据的数据集输入输入层,由此,通过对于包含过去的多次基板搬送时的传感器数据的数据集,反复进行比较从输出层输出的输出结果与该基板搬送时的搬送异常度并按照其误差更新各节点的参数的处理,从而对包含过去的基板搬送时所输出的传感器数据的数据集与该基板搬送时的搬送异常度的关系性进行机器学习,
63.并使计算机发挥以下功能:将包含从所述多个传感器分别在新的基板搬送时所输出的传感器数据的数据集输入输入层时,推定该新的基板搬送时的搬送异常度,并从输出层输出。
64.以下,参照附图详细说明实施方式的具体例。另外,以下的说明及以下说明时使用的图,对于相同构成的部分使用相同符号,并且省略重复的说明。
65.图1是表示一种实施方式的基板处理装置1的概略性构成图。
66.如图1所示,基板处理装置1具有:顶环6、基板搬送部2、喷嘴3a、3b、搬送异常预测系统10及输出装置4。
67.顶环6在下表面设有气囊,将基板w向下保持,并且以在基板搬送位置(与基板搬送部2相对的位置)与基板处理位置(例如与无图示的研磨台相对的位置)之间移动基板w的方式构成。
68.喷嘴3a、3b配置于基板搬送位置中的顶环6的侧方,并以在顶环6的气囊与基板w之间喷射空气及淋浴,而从顶环6剥离基板w的方式构成。
69.基板搬送部2配置于基板搬送位置中的顶环6的下方,并以接收从顶环6剥离而落下的基板w的方式构成。基板搬送部2例如使用升降机或是线性传输机(ltp)。
70.如图1所示,基板搬送部2中设有多个(图示的例是3个)传感器51~53。图示的例是多个传感器51~53都是测量基板搬送部2的振动的振动传感器(加速度传感器),且安装于基板搬送部2中的手臂部分及轴部分等直接传递交接基板w时的振动的部位。
71.另外,多个传感器51~53并非限定于振动传感器,亦可由振动传感器、声音传感器、图像传感器、影像传感器、温度传感器、设备移动速度传感器、设备动作转矩传感器、设备平行度传感器中的一种或两种以上构成。
72.图3是表示正常基板搬送时从传感器51~53输出的传感器数据的一例图。图3中,以四方实线包围的区域表示搬送一片基板时(一个周期)从开始搬送至搬送结束为止的传感器数据。如图3所示,正常搬送时,每一周期从传感器51~53反复输出同样波形的传感器数据。
73.图4是用于说明发生搬送异常时的基板搬送部2的图,图5是表示发生搬送异常时的传感器数据的一例图。
74.如图4所示,代表性的搬送异常的征候为基板w无法从顶环6左右对称地剥离,基板w以倾斜的姿势落下。此时,因为基板位于基板搬送部2时的撞击集中在基板w的一处,容易造成基板w破损。症状进一步恶化时,基板w会从基板搬送部2落下。图4所示的例,搬送异常的发生原因(异常种类)可考虑(1)从喷嘴3a、3b喷射的空气及淋浴触及的位置偏移;(2)顶环6的轴与基板搬送部2的轴偏移这两个原因。
75.如图5所示,发生搬送异常时,会从传感器51~53输出与正常时的波形不同波形的传感器数据。图5中,四方实线所包围的区域表示发生搬送异常时从开始搬送至搬送结束为止的传感器数据。
76.输出装置4是对使用者(例如基板处理装置1的操作者)输出各种信息的界面,例如使用液晶显示器等的影像显示机构(显示器)、灯、及喇叭等。
77.如图1所示,搬送异常预测系统10分别与多个传感器51~53及输出装置4可通信地连接。
78.其次,说明搬送异常预测系统10的构成。图2是表示搬送异常预测系统10的构成的块图。搬送异常预测系统10的至少一部分通过一台计算机或量子计算系统,或相互经由网络而连接的多台计算机或量子计算系统而构成。
79.如图2所示,搬送异常预测系统10具有:输入部11、控制部12、存储部13、输出部14。各部11~14经由总线或网际网络可通信地连接。
80.其中的输入部11是对于设于基板搬送部2的多个传感器51~5n的通信界面。输入
部11亦可以由有线连接,亦可以由无线连接于多个传感器51~5n的各个输出端子。
81.输出部14是对于输出装置4的通信界面。输出部14亦可以由有线连接,亦可以由无线连接于输出装置4的输入端子。
82.存储部13例如是快闪存储器等非挥发性数据存储体。存储部13中存储控制部12处理的各种数据。例如,存储部13中存储由后述的推定部121参照的数据集151、及由后述的输出信号发送部122参照的阈值152。
83.数据集151分别从设于基板搬送部2的多个传感器51~5n在新的基板搬送时输出,并含有经由输入部11所取得的传感器数据。数据集151亦可进一步含有在该基板搬送时的设备动作时间、维修后经过时间、基板处理部(与基板w接触而逐渐磨损的部分)的零件使用时间中的至少一个时间信息。
84.如图2所示,控制部12具有:推定部121、输出信号发送部122、及再学习部123。这些各部亦可通过搬送异常预测系统10中的处理器执行指定的程序来实现,亦可以由硬件安装。
85.推定部121具有完成学习模型120(例如,调谐后的类神经网络系统,参照图6至图13),该完成学习模型120对包含从设于基板搬送部2的多个传感器51~5n分别在过去基板搬送时所输出的传感器数据的数据集、与该基板搬送时的搬送异常度的关系性进行机器学习,并将包含分别从多个传感器51~5n在新的基板搬送时所输出的传感器数据的数据集(亦即,存储于存储部13的数据集131)作为输入,推定在该新的基板搬送时的搬送异常度并输出。
86.推定部121中的处理的时序的第一例为推定部121亦可实时处理,亦即,亦可将包含新的基板搬送时从开始搬送至当前为止的传感器数据的数据集131作为输入,推定在该新的基板搬送时的搬送异常度并输出。
87.推定部121中的处理的时序的第二例为推定部121亦可每一片基板w进行处理,亦即,亦可将包含新的基板搬送时从开始搬送至搬送结束为止的传感器数据的数据集131作为输入,推定在该新的基板搬送时的搬送异常度并输出。
88.推定部121中的处理的时序的第三例为推定部121亦可每一批基板w(例如一批是25片)进行处理,亦即,推定部121亦可将包含多片(一批)新的基板搬送时从开始搬送最初基板至最后基板搬送结束为止的传感器数据的数据集131作为输入,推定在搬送该多片(一批)新的基板时之搬送异常度并输出。
89.推定部121亦可将分别从多个传感器51~5n所输出的传感器数据原样作为输入来利用,亦可将提取(前处理)通过fft(快速傅立叶变换)而预定的频率区域的强度作为输入来利用。
90.图6是用于说明第一方式中的完成学习模型120的构成模式图。图6所示的例的完成学习模型120是调谐后的类神经网络系统,且含有具有:输入层;连接于输入层的一个或二个以上的中间层;及连接于中间层的输出层的阶层型的类神经网络或量子类神经网络(qnn)。图6中,阶层型的类神经网络系图示了前馈类神经网络,不过可使用卷积类神经网络(cnn)及循环类神经网络(rnn)等各种类型的类神经网络。完成学习模型120亦可包含中间层为2层以上的多层化的类神经网络,亦即深度学习。
91.对于第一方式中的完成学习模型120的生成方法的一例说明如下,准备在从设于
基板搬送部2的多个传感器51~5n分别在过去基板搬送时输出的传感器数据中,附加该基板搬送时是否发生搬送异常(例如,正常基板搬送时为0,发生搬送异常时为1)的标签的教师数据,如图6所示,将教师数据中所含的一个基板搬送时的传感器数据输入输入层,由此,反复进行比较从输出层输出的输出结果、与教师数据中包含的该基板搬送时是否发生搬送异常的标签,对于教师数据中包含的多个基板搬送时的各个数据,按照其误差更新各节点的参数(加权及阈值等)的处理。因此,生成基于从设于基板搬送部2的多个传感器51~5n分别在过去基板搬送时所输出的传感器数据,预测该基板搬送时发生搬送异常的概率(搬送异常概率)的完成学习模型120(调谐后的类神经网络系统)。
92.第一方式中,推定部121将从多个传感器51~5n分别在新的基板搬送时输出的传感器数据作为输入,基于通过完成学习模型120预测的发生搬送异常时的概率(搬送异常概率),推定在该新的基板搬送时的搬送异常度并输出。另外,搬送异常度亦可以是通过完成学习模型120预测的发生搬送异常时的概率(搬送异常概率),亦可以是以指定函数唯一变换该搬送异常概率的值。
93.图7是用于说明第二方式中的完成学习模型120的构成模式图。图7所示的例的完成学习模型120是调谐后的类神经网络系统,且含有具有:输入层;连接于输入层的一个或二个以上的中间层;及连接于中间层的输出层的阶层型类神经网络或量子类神经网络(qnn)。图7中,阶层型的类神经网络图示了前馈类神经网络,不过可使用卷积类神经网络(cnn)及循环类神经网络(rnn)等各种类型的类神经网络。完成学习模型120亦可包含中间层为2层以上多层化的类神经网络,亦即深度学习。
94.对于第二方式中的完成学习模型120的生成方法的一例说明如下,准备在包含从设于基板搬送部2的多个传感器51~5n分别在过去基板搬送时输出的传感器数据、及该基板搬送时的时间信息(亦即,在该基板搬送时的设备动作时间、维修后经过时间、基板处理部的零件使用时间中的至少一个)的数据集中,附加该基板搬送时是否发生搬送异常(例如,正常基板搬送时为0,发生搬送异常时为1)的标签的教师数据,如图7所示,将教师数据中所含的一个基板搬送时的数据集输入输入层,由此,反复进行比较从输出层输出的输出结果、与教师数据中包含的该基板搬送时是否发生搬送异常的标签,对于教师数据中包含的多个基板搬送时的各个数据,按照其误差更新各节点的参数(加权及阈值等)的处理。因此,生成基于包含从设于基板搬送部2的多个传感器51~5n分别在过去基板搬送时所输出的传感器数据与该基板搬送时的时间信息的数据集,预测该基板搬送时发生搬送异常的概率(搬送异常概率)的完成学习模型120(调谐后的类神经网络系统)。
95.第二方式中,推定部121将包含从多个传感器51~5n分别在新的基板搬送时输出的传感器数据、与该新的基板搬送时的时间信息的数据集作为输入,基于通过完成学习模型120预测的发生搬送异常时的概率(搬送异常概率),推定在该新的基板搬送时的搬送异常度并输出。另外,搬送异常度亦可以是通过完成学习模型120预测的发生搬送异常时的概率(搬送异常概率),亦可以是以指定函数唯一变换该搬送异常概率的值。
96.图8是用于说明第三方式中的完成学习模型120的构成模式图。图8所示的例的完成学习模型120是调谐后的类神经网络系统,且含有具有:输入层;连接于输入层的一个或二个以上的中间层;及连接于中间层的输出层的阶层型类神经网络或量子类神经网络(qnn)。图8中,阶层型的类神经网络图示了前馈类神经网络,不过可使用卷积类神经网络
(cnn)及循环类神经网络(rnn)等各种类型的类神经网络。完成学习模型120亦可包含中间层为2层以上多层化的类神经网络,亦即深度学习。
97.对于第三方式中的完成学习模型120的生成方法的一例说明如下,准备在从设于基板搬送部2的多个传感器51~5n分别在过去基板搬送时输出的传感器数据中,附加该基板搬送时是否发生搬送异常(例如,正常基板搬送时为0,发生搬送异常时为1)的标签,并且附加发生搬送异常时搬送异常的发生原因(异常种类)的标签的教师数据,如图8所示,将教师数据中所含的一个基板搬送时的传感器数据输入输入层,由此,反复进行比较从输出层输出的输出结果、与教师数据中包含的各个搬送异常的发生原因(异常种类)的该基板搬送时是否发生搬送异常的标签,对于教师数据中包含的多个基板搬送时的各个数据,按照其误差更新各节点的参数(加权及阈值等)的处理。因此,生成基于包含从设于基板搬送部2的多个传感器51~5n分别在过去基板搬送时所输出的传感器数据,各个搬送异常的发生原因(异常种类)预测该基板搬送时发生搬送异常的概率(搬送异常概率)的完成学习模型120(调谐后的类神经网络系统)。
98.第三方式中,推定部121将从多个传感器51~5n分别在新的基板搬送时输出的传感器数据作为输入,通过完成学习模型120,基于对于各个搬送异常的发生原因(异常种类)预测的发生搬送异常时的概率(搬送异常概率),各个搬送异常的发生原因(异常种类)推定在该新的基板搬送时的搬送异常度并输出。另外,搬送异常度亦可以是通过完成学习模型120预测的发生搬送异常时的概率(搬送异常概率),亦可以是以指定函数唯一变换该搬送异常概率的值。
99.图9是用于说明第四方式中的完成学习模型120的构成模式图。图9所示的例的完成学习模型120是调谐后的类神经网络系统,且含有具有:输入层;连接于输入层的一个或二个以上的中间层;及连接于中间层的输出层的阶层型类神经网络或量子类神经网络(qnn)。图9中,阶层型的类神经网络图示了前馈类神经网络,不过可使用卷积类神经网络(cnn)及循环类神经网络(rnn)等各种类型的类神经网络。完成学习模型120亦可包含中间层为2层以上多层化的类神经网络,亦即深度学习。
100.对于第四方式中的完成学习模型120的生成方法的一例说明如下,准备在包含从设于基板搬送部2的多个传感器51~5n分别在过去基板搬送时输出的传感器数据、及该基板搬送时的时间信息(亦即,在该基板搬送时的设备动作时间、维修后经过时间、基板处理部之零件使用时间中的至少一个)的数据集中,附加该基板搬送时是否发生搬送异常(例如,正常基板搬送时为0,发生搬送异常时为1)的标签,并且在发生搬送异常时附加搬送异常的发生原因(异常种类)的标签的教师数据,如图9所示,将教师数据中所含的一个基板搬送时的数据集输入输入层,由此,反复进行比较从输出层输出的输出结果、与教师数据中包含的各个搬送异常的发生原因(异常种类)的该基板搬送时是否发生搬送异常的标签,对于教师数据中包含的多个基板搬送时的各个数据,按照其误差更新各节点的参数(加权及阈值等)的处理。因此,生成基于包含从设于基板搬送部2的多个传感器51~5n分别在过去基板搬送时所输出的传感器数据与该基板搬送时的时间信息的数据集,对于各个搬送异常的发生原因(异常种类)预测该基板搬送时发生搬送异常的概率(搬送异常概率)的完成学习模型120(调谐后的类神经网络系统)。
101.第四方式中,推定部121将包含从多个传感器51~5n分别在新的基板搬送时输出
的传感器数据、与该新的基板搬送时的时间信息的数据集作为输入,通过完成学习模型120基于对于各个搬送异常的发生原因(异常种类)预测的发生搬送异常时的概率(搬送异常概率),对于各个搬送异常的发生原因(异常种类)推定在该新的基板搬送时的搬送异常度并输出。另外,搬送异常度亦可以是通过完成学习模型120预测的发生搬送异常时的概率(搬送异常概率),亦可以是以指定函数唯一变换该搬送异常概率的值。
102.图10是用于说明第五方式中的完成学习模型120的构成模式图。图10所示的例的完成学习模型120是调谐后的类神经网络系统,且含有具有:输入层;连接于输入层的一个或二个以上的中间层;及连接于中间层的输出层的阶层型类神经网络或量子类神经网络(qnn)。图10中,阶层型的类神经网络图示了前馈类神经网络,不过可使用卷积类神经网络(cnn)及循环类神经网络(rnn)等各种类型的类神经网络。完成学习模型120亦可包含中间层为2层以上多层化的类神经网络,亦即深度学习。
103.对于第五方式中的完成学习模型120的生成方法的一例说明如下,准备在从设于基板搬送部2的多个传感器51~5n分别在过去基板搬送时输出的传感器数据中,附带了从该基板搬送时至发生搬送异常时为止的剩余时间或剩余搬送次数的教师数据,如图10所示,将教师数据中所含的一个基板搬送时的传感器数据输入输入层,由此,反复进行比较从输出层输出的输出结果、与教师数据中包含的从该基板搬送时至发生搬送异常时为止的剩余时间或剩余搬送次数,对于教师数据中包含的多个基板搬送时的各个数据,按照其误差更新各节点的参数(加权及阈值等)的处理。因此,生成基于从设于基板搬送部2的多个传感器51~5n分别在过去基板搬送时所输出的传感器数据,预测从该基板搬送时至发生搬送异常时为止的剩余时间或剩余搬送次数的完成学习模型120(调谐后的类神经网络系统)。
104.第五方式中,推定部121将从多个传感器51~5n分别在新的基板搬送时输出的传感器数据作为输入,基于通过完成学习模型120预测的剩余时间或剩余搬送次数,推定在该新的基板搬送时的搬送异常度并输出。另外,搬送异常度亦可以是通过完成学习模型120预测的剩余时间或剩余搬送次数,亦可以是以指定函数唯一变换该剩余时间或剩余搬送次数的值。例如,搬送异常度亦可以是将通过完成学习模型120预测的剩余时间除以从维修时至发生搬送异常时为止的平均时间的值,亦可以是将通过完成学习模型120预测的剩余搬送次数除以从维修时至发生搬送异常为止的平均搬送次数的值。
105.图11是用于说明第六方式中的完成学习模型120的构成模式图。图11所示的例的完成学习模型120是调谐后的类神经网络系统,且含有具有:输入层;连接于输入层的一个或二个以上的中间层;及连接于中间层的输出层的阶层型类神经网络或量子类神经网络(qnn)。图11中,阶层型的类神经网络图示了前馈类神经网络,不过可使用卷积类神经网络(cnn)及循环类神经网络(rnn)等各种类型的类神经网络。完成学习模型120亦可包含中间层为2层以上多层化的类神经网络,亦即深度学习。
106.对于第六方式中的完成学习模型120的生成方法的一例说明如下,准备在包含从设于基板搬送部2的多个传感器51~5n分别在过去基板搬送时输出的传感器数据、及该基板搬送时的时间信息(亦即,在该基板搬送时的设备动作时间、维修后经过时间、基板处理部的零件使用时间中的至少一个)的数据集中,附带了从该基板搬送时至发生搬送异常时为止的剩余时间或剩余搬送次数的教师数据,如图10所示,将教师数据中所含的一个基板搬送时的数据集输入输入层,由此,反复进行比较从输出层输出的输出结果、与教师数据中
包含的从该基板搬送时至发生搬送异常时为止的剩余时间或剩余搬送次数,对于教师数据中包含的多个基板搬送时的各个数据,按照其误差更新各节点的参数(加权及阈值等)的处理。因此,生成基于包含从设于基板搬送部2的多个传感器51~5n分别在过去基板搬送时所输出的传感器数据与该基板搬送时的时间信息的数据集,预测从该基板搬送时至发生搬送异常时为止的剩余时间或剩余搬送次数的完成学习模型120(调谐后的类神经网络系统)。
107.第六方式中,推定部121将包含从多个传感器51~5n分别在新的基板搬送时输出的传感器数据、与该新的基板搬送时的时间信息的数据集作为输入,基于通过完成学习模型120预测的剩余时间或剩余搬送次数,推定在该新的基板搬送时的搬送异常度并输出。另外,搬送异常度亦可以是通过完成学习模型120预测的剩余时间或剩余搬送次数,亦可以是以指定函数唯一变换该剩余时间或剩余搬送次数的值。例如,搬送异常度亦可以是将通过完成学习模型120预测的剩余时间除以从维修时至发生搬送异常时为止的平均时间的值,亦可以是将通过完成学习模型120预测的剩余搬送次数除以从维修时至发生搬送异常为止的平均搬送次数的值。
108.图12是用于说明第七方式中的完成学习模型120的构成模式图。图12所示的例的完成学习模型120将包含过去正常基板搬送时的传感器数据的数据集作为教师数据,并以k近邻算法进行机器学习,且基于包含新的基板搬送时的传感器数据的数据集,计算该数据集至k近邻的距离。图12所示的例中,多个空心圆(
“○”
)分别表示过去正常基板搬送时传感器数据在特征空间的位置,空心三角(
“△”
)表示新的基板搬送时传感器数据在特征空间的位置,虚线表示k=3时至k近邻的距离。
109.第七方式中,推定部121将包含新的基板搬送时的传感器数据的数据集作为输入,基于通过完成学习模型120计算的至k近邻的距离来推定搬送异常度并输出。另外,搬送异常度亦可以是通过完成学习模型120计算的至k近邻的距离,亦可以是以指定函数唯一变换至该k近邻的距离的值。
110.图13是用于说明第八方式中的完成学习模型120的构成模式图。图13所示的例的完成学习模型120是调谐后的类神经网络系统,且含有具有:输入层;连接于输入层的一个或二个以上的中间层;及连接于中间层的输出层的阶层型类神经网络或量子类神经网络(qnn)。完成学习模型120亦可包含中间层为2层以上多层化的类神经网络,亦即深度学习。
111.第八方式中的完成学习模型120将包含过去正常基板搬送时的传感器数据的数据集作为教师数据,并以lstm(long short-term memory;长短期记忆)进行机器学习。图13所示的例中,完成学习模型120例如基于包含从维修时至新的搬送基板之前实际的传感器数据(第1至n-1周期的传感器数据)的数据集,预测包含该新的基板搬送时的传感器数据(第n周期的传感器数据的预测值)的数据集。
112.第八方式中,推定部121将包含从维修时至新的基板搬送时为止的实际传感器数据(第1至n周期的传感器数据)的数据集作为输入,从包含该新的搬送基板之前实际的传感器数据(第1至n-1周期的传感器数据)的数据集,计算通过完成学习模型120预测的包含该新的基板搬送时的传感器数据(第n周期的传感器数据的预测值)的数据集、与包含该新的基板搬送时实际的传感器数据(第n周期的传感器数据)的数据集的乖离,并基于该乖离推定搬送异常度并输出。另外,搬送异常度亦可以是该乖离者,亦可以是以指定的函数唯一变换该乖离的值。
113.推定部121具有多个完成学习模型120(例如第一至第八方式的完成学习模型120中的二个以上),亦可基于通过多个完成学习模型120的预测的组合(亦即整体学习)来推定搬送异常度并输出。
114.输出信号发送部122将通过推定部121输出的搬送异常度与预定的阈值152比较,在搬送异常度超过阈值152情况下,将用于输出维修通知及/或警报的输出信号经由输出部14发送至输出装置4。
115.再学习部123将包含在新的基板搬送时输出的传感器数据的数据集131作为教师数据,使完成学习模型120进行再学习。
116.其次,说明通过如此构成的搬送异常预测系统10实施的搬送异常预测方法的一例。图14是表示搬送异常预测方法的一例的流程图。
117.如图14所示,推定部121取得包含从设于基板搬送部2的多个传感器51~5n分别在新的基板搬送时输出的传感器数据的数据集131(步骤s11)。通过推定部121取得的数据集131亦可包含在该基板搬送时的设备动作时间、维修后经过时间、基板处理部的零件使用时间中的至少一个时间信息。通过推定部121取得的数据集131存储于存储部13。
118.而后,推定部121使用对包含从多个传感器51~5n分别在过去基板搬送时输出的传感器数据的数据集、与该基板搬送时的搬送异常度的关系性进行机器学习后的完成学习模型120,将包含从多个传感器51~5n分别在新的基板搬送时输出的传感器数据的数据集131作为输入,推定在该新的基板搬送时的搬送异常度并输出(步骤s12)。
119.步骤s12中,推定部121亦可使用对包含从多个传感器51~5n分别在过去基板搬送时输出的传感器数据的数据集、与各个搬送异常的发生原因(异常种类)在该基板搬送时的搬送异常度的关系性进行机器学习后的完成学习模型120(参照图8、9),将包含从多个传感器51~5n分别在新的基板搬送时输出的传感器数据的数据集131作为输入,对各个搬送异常的发生原因(异常种类)推定在该新的基板搬送时的搬送异常度并输出。
120.其次,输出信号发送部122将通过推定部121输出的搬送异常度与预定的阈值152比较(步骤s13)。
121.通过推定部121输出的搬送异常度超过阈值152情况下(步骤s13:是(yes)),输出信号发送部122将用于输出维修通知及/或警报的输出信号经由输出部14发送至输出装置4(步骤s14)。
122.另外,通过推定部121输出的搬送异常度未超过阈值152情况下(步骤s13:否(no)),再学习部123将包含该新的基板搬送时输出的传感器数据的数据集131作为附加正常时的标签的教师数据,使完成学习模型120进行再学习(步骤s15)。
123.采用如上的本实施方式时,通过推定部121使用对包含在过去基板搬送时的传感器数据的数据集、与该基板搬送时的搬送异常度的关系性进行机器学习后的完成学习模型120,对包含在新的基板搬送时的传感器数据的数据集131,从多个指标数据综合,可推定在该新的基板搬送时的搬送异常度并输出。由此,比在搬送基板中传感器的输出与搬送基板前位置对齐时存储的传感器的输出的差超过一定阈值时判断为异常的过去方式,可提高搬送异常的检测概率。此外,通过使用完成学习模型120亦可利用过去方式不易处理的设备的振动、声音、图像数据等作为传感器数据。
124.此外,采用本实施方式时,当通过推定部121所推定的搬送异常度超过阈值152时,
因为输出信号发送部122将用于输出维修通知及/或警报的输出信号发送至输出装置4,所以将来自输出装置4的输出作为触发器,通过使用者(例如基板处理装置1的操作者)进行维修,可事前防止处理错误。
125.此外,采用本实施方式时,因为再学习部123将包含新的基板搬送时输出的传感器数据的数据集131作为教师数据使完成学习模型120进行再学习,所以可获得追随装置运转状况的变化的系统。
126.此外,采用图8、9所示的实施方式时,因为推定部121基于包含过去基板搬送时的传感器数据的数据集与各个搬送异常的发生原因(异常种类)的该基板搬送时的搬送异常度之间存在的关系性,将包含新的基板搬送时的传感器数据的数据集作为输入,各个搬送异常的发生原因(异常种类)推定该新的基板搬送时的搬送异常度并输出,通过从推定为搬送异常度高的搬送异常的发生原因(异常种类)进行调查,可使装置的维修时间缩短。
127.另外,本实施方式的搬送异常预测系统10可通过1台计算机或量子计算系统,或是通过相互经由网络而连接的多台计算机或量子计算系统而构成,不过,在1台或多台计算机或量子计算系统中,用于使搬送异常预测系统10实现的程序及非暂时性(non-transitory)记录该程序的计算机可读取的记录介质,亦为本发明的保护对象。
128.以上,通过例示说明实施方式及修改例,不过,本技术的范围并非限定于这些,在权利要求所记载的范围内可按照目的而变更、修改。此外,各种实施方式及修改例在不使处理内容产生矛盾范围内可适当组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1