部件更换系统和部件更换装置的制作方法
1.本发明的各种方面和实施方式涉及部件更换系统和部件更换装置。
背景技术:
2.在处理基片的处理装置的内部,存在随着进行基片的处理而消耗的消耗部件。这样的消耗部件在消耗量比预先设定的消耗量大的情况下,与使用前的消耗部件进行更换。在消耗部件的更换中,停止处理装置中的基片的处理,将处理装置的容器向大气开放。然后,用人手取出使用后的消耗部件,安装使用前的消耗部件。然后,再次关闭容器,将容器内抽真空,再次开始基片的处理。
3.如上所述,在消耗部件的更换中,处理装置的内部向大气开放,因此在更换消耗部件后处理装置内需要抽真空,处理的停止时间变长。此外,在消耗部件中,也存在大型的部件,因此用人手进行的更换耗费时间。
4.为了避免上述问题,已知具有使用前的消耗部件和用于更换消耗部件的更换操作部的更换站(例如,参照下述专利文献1)。在这样的更换站中,处理装置与更换站连接,在对更换站内抽真空之后打开处理装置与更换站之间的切断阀。之后,用更换站内的更换操作部从处理装置内取出使用后的消耗部件,与搭载于更换站内的使用前的消耗部件进行更换。由此,不将处理装置的内部向大气开放就能够进行消耗部件的更换,能够缩短处理的停止时间。另外,消耗部件的更换不由人手而由更换操作部进行,因此能够在短时间内进行消耗部件的更换。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2017
‑
85072号公报
技术实现要素:
8.发明要解决的技术问题
9.本发明提供一种能够削减半导体装置的制造中的系统的设置面积的部件更换系统和部件更换装置。
10.用于解决技术问题的技术方案
11.本发明的一个方面是进行消耗部件的更换的部件更换系统,其包括部件收纳装置和部件更换装置。部件收纳装置收纳使用前的消耗部件。部件更换装置与处理装置和部件收纳装置连接,能够将安装于该处理装置内的使用后的消耗部件与收纳于部件收纳装置内的使用前的消耗部件进行更换。此外,部件更换装置能够移动至安装有作为更换对象的消耗部件的处理装置的位置,与该处理装置连接。此外,部件收纳装置能够移动至与安装有作为更换对象的消耗部件的处理装置连接的部件更换装置的位置,与该部件更换装置连接。
12.发明效果
13.依照本发明的各种侧面和实施方式,能够削减半导体装置的制造中的系统的设置
面积。
附图说明
14.图1是表示本发明的一实施方式中的制造系统的一例的系统构成图。
15.图2是表示处理装置的一例的概略截面图。
16.图3是表示部件更换装置的一例的概略截面图。
17.图4是表示图3中例示的部件更换装置的a
‑
a截面的一例的图。
18.图5是表示处理装置与部件更换装置的连接部分的一例的放大截面图。
19.图6是表示处理装置与部件更换装置的连接部分的一例的放大截面图。
20.图7是表示部件收纳装置的一例的概略截面图。
21.图8是表示治具收纳装置的一例的概略截面图。
22.图9是说明消耗部件的更换步骤的图。
23.图10是说明消耗部件的更换步骤的图。
24.图11是说明消耗部件的更换步骤的图。
25.图12是说明消耗部件的更换步骤的图。
26.图13是说明消耗部件的更换步骤的图。
27.图14是说明消耗部件的更换步骤的图。
28.图15是说明消耗部件的更换步骤的图。
29.图16是说明消耗部件的更换步骤的图。
30.图17是说明消耗部件的更换步骤的图。
31.图18是说明消耗部件的更换步骤的图。
32.图19是表示控制装置的一例的框图。
33.图20是表示管理表的一例的图。
34.图21是表示控制装置的处理的一例的流程图。
35.图22是表示控制装置的处理的一例的流程图。
36.图23是表示部件更换装置的处理的一例的流程图。
37.图24是表示部件更换装置的处理的一例的流程图。
38.图25是表示部件收纳装置和治具收纳装置的处理的一例的流程图。
39.附图标记说明
40.w
ꢀꢀꢀ
基片
41.10
ꢀꢀ
制造系统
42.20
ꢀꢀ
控制装置
43.210 管理表
44.30
ꢀꢀ
处理组
45.31
ꢀꢀ
真空输送室
46.32
ꢀꢀ
负载锁定室
47.33
ꢀꢀ
大气输送室
48.331 装载端阜
49.40
ꢀꢀ
处理装置
50.41
ꢀꢀ
腔室
51.42
ꢀꢀ
支承部
52.421 下部电极
53.422 静电吸盘
54.423 边缘环
55.43
ꢀꢀ
上部电极喷淋头组件
56.44
ꢀꢀ
气体供给部
57.45
ꢀꢀ
rf功率供给部
58.46
ꢀꢀ
排气系统
59.50
ꢀꢀ
部件更换装置
60.510 上部容器
61.511 下部容器
62.513 闸门
63.52
ꢀꢀ
操作机器人
64.520 操作臂
65.53
ꢀꢀ
输送机器人
66.530 输送臂
67.56
ꢀꢀ
移动机构
68.60
ꢀꢀ
部件收纳装置
69.610 上部容器
70.611 下部容器
71.613 闸门
72.62
ꢀꢀ
盒
73.66
ꢀꢀ
移动机构
74.70
ꢀꢀ
治具收纳装置
75.710 上部容器
76.711 下部容器
77.713 闸门
78.72
ꢀꢀ
盒
79.76
ꢀꢀ
移动机构
80.80
ꢀꢀ
消耗部件
81.81
ꢀꢀ
末端执行器
82.82
ꢀꢀ
保持部件。
具体实施方式
83.以下,参照附图,对部件更换系统和部件更换装置的实施方式详细地进行说明。此外,本发明的部件更换系统和部件更换装置不限于以下的实施方式。
84.但是,在产品的量产工序中,用多个处理装置进行基片的处理,因此,在设置于不同的场所的处理装置中,进行消耗部件的更换。因此,搭载有使用前的消耗部件的更换站需
要移动至需要更换消耗部件的处理装置的场所。
85.在更换站内仅收纳有一个使用前的消耗部件的情况下,消耗部件的更换刚结束后的更换站无法开始下一次更换作业,直至补充使用前的消耗部件为止。因此,具有到了更换时期的消耗部件的处理装置会使处理待机直至进行消耗部件的更换为止,而处理的生产率降低。对此,在更换站内收纳多个使用前的消耗部件的情况下,能够持续更换消耗部件直至所收纳的使用前的消耗部件消耗尽为止,因此,能够抑制处理的生产率降低。
86.但是,当更换站内所收纳的消耗部件的数量变多时,更换站会变大。由此,需要将更换站移动的通路的宽度扩大,半导体装置的制造系统整体的设置面积会变大。
87.于是,本发明提供一种能够削减半导体装置的制造中的系统的设置面积的技术。
88.[制造系统10的构成]
[0089]
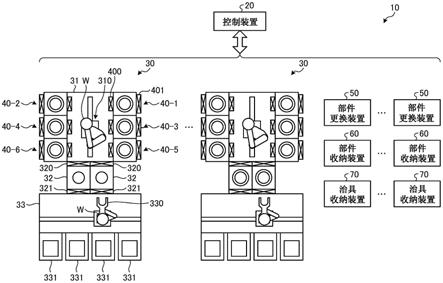
图1是表示本发明的一实施方式中的制造系统10的一例的系统构成图。制造系统10是部件更换系统的一例。在一实施方式中,制造系统10包括控制装置20、多个处理组30、多个部件更换装置50、多个部件收纳装置60和多个治具收纳装置70。控制装置20与处理组30、部件更换装置50、部件收纳装置60和治具收纳装置70分别通信,对处理组30、部件更换装置50、部件收纳装置60和治具收纳装置70分别进行控制。
[0090]
各个处理组30具有真空输送室31、多个处理装置40
‑
1~40
‑
6、多个负载锁定室32和大气输送室33。此外,在下文中,在不区分多个处理装置40
‑
1~40
‑
6的每一者而进行总称时,记为处理装置40。
[0091]
真空输送室31与多个处理装置40和多个负载锁定室32连接。在本实施方式中,真空输送室31与6台处理装置40连接,但是真空输送室31也可以与5台以下的处理装置40连接,还可以与7台以上的处理装置40连接。此外,在本实施方式中,真空输送室31与2台负载锁定室32连接,但是真空输送室31也可以与1台负载锁定室32连接,还可以与3台以上的负载锁定室32连接。
[0092]
各个处理装置40对基片w例如在低压环境下实施蚀刻和成膜等的处理。在各个处理装置40内安装有随着对基片w的处理而消耗的消耗部件。各个处理装置40和真空输送室31由闸门(gate valve)400分隔。此外,在各个处理装置40设置有用于进行使用后的消耗部件的送出和使用前的消耗部件的送入的闸门401。各个处理装置40可以为在制造工艺中执行同一工序的装置,也可以为执行不同工序的装置。
[0093]
各个负载锁定室32具有闸门320和闸门321,将内部的压力从预先设定的真空度的压力切换至大气压,或者从大气压切换至预先设定的真空度的压力。负载锁定室32和真空输送室31由闸门320分隔。此外,负载锁定室32和大气输送室33由闸门321分隔。
[0094]
在真空输送室31内配置有机械臂(robot arm)310。真空输送室31内被保持为预先设定的真空度。在本实施方式中,机械臂310从减压为预先设定的真空度的负载锁定室32内取出处理前的基片w,输送到任一处理装置40内。此外,机械臂310将处理后的基片w从处理装置40取出,输送到其他处理装置40或者负载锁定室32内。
[0095]
在大气输送室33内设置有机械臂330。此外,在大气输送室33设置有与能够收纳多个处理前或者处理后的基片w的容器(例如,foup:front opening unified pod:前开式晶圆传送盒)连接的多个装载端阜(load port)331。机械臂330从与装载端阜331连接的容器取出处理前的基片w输送到负载锁定室32内。此外,机械臂330从负载锁定室32取出处理后
的基片w输送到与装载端阜331连接的容器内。此外,也可以在大气输送室33设置有调整从与装载端阜331连接的容器取出的基片w的朝向的对准单元。
[0096]
各个部件更换装置50具有用于进行消耗部件的更换的机械臂和移动机构,根据来自控制装置20的指示,移动至具有需要更换的消耗部件的处理装置40的位置,与该处理装置40连接。各个部件收纳装置60具有多个使用前的消耗部件和移动机构,根据来自控制装置20的指示,移动至与具有需要更换的消耗部件的处理装置40连接的部件更换装置50的位置,与该部件更换装置50连接。各个治具收纳装置70具有用于进行消耗部件的更换的治具和移动机构,根据来自控制装置20的指示,移动至与具有需要更换的消耗部件的处理装置40连接的部件更换装置50的位置,与该部件更换装置50连接。
[0097]
部件更换装置50的机械臂将用于进行消耗部件的更换的治具从治具收纳装置70取出,使用该治具从处理装置40卸下使用后的消耗部件,将卸下的消耗部件收纳在部件收纳装置60内。然后,部件更换装置50的机械臂从部件收纳装置60内取出使用前的消耗部件,将取出的消耗部件安装在处理装置40内。由此,在处理装置40内,将使用后的消耗部件与使用前的消耗部件进行更换。
[0098]
如上所述,本实施方式的制造系统10中,进行消耗部件的更换的部件更换装置50和收纳有多个消耗部件的部件收纳装置60分别向具有需要更换的消耗部件的处理装置40的场所移动。由此,与设有部件更换装置50和部件收纳装置60的更换站相比,能够使部件更换装置50和部件收纳装置60小型化。因此,能够使供部件更换装置50和部件收纳装置60移动的通路的宽度变窄。由此,能够削减制造系统10整体的设置面积。
[0099]
[处理装置40的构成]
[0100]
图2是表示处理装置40的一例的概略截面图。在本实施方式中,处理装置40包括腔室41、气体供给部44、rf(radio frequency:高频)功率供给部45和排气系统46。
[0101]
腔室41具有支承部42和上部电极喷淋头组件43。支承部42配置于腔室41内的处理空间41s的下部区域。上部电极喷淋头组件43配置于支承部42的上方,能够作为腔室41的顶板的一部分发挥作用。
[0102]
支承部42构成为能够在处理空间41s中支承基片w。在本实施方式中,支承部42包括下部电极421和静电吸盘422。静电吸盘422构成为配置于下部电极421上,能够在静电吸盘422的上表面支承基片w。在下部电极421的周缘部上表面设置有边缘环423。边缘环423以包围静电吸盘422和基片w配置于下部电极421的周缘部上表面。边缘环423是消耗部件的一例。
[0103]
在腔室41的底部、下部电极421和静电吸盘422形成有用于使升降销47通过的贯通孔。升降销47在送入基片w时和送出基片w时通过驱动部470进行升降。由此,能够从机械臂310接收送入到腔室41内的处理前的基片w并将其载置在静电吸盘422上,能够将处理后的基片w交接到机械臂310以从腔室41内送出。
[0104]
上部电极喷淋头组件43构成为能够将来自气体供给部44的一种以上的气体供给到处理空间41s内。在本实施方式中,上部电极喷淋头组件43具有电极支承部43d和上部电极43e。上部电极43e通过螺纹件等固定部件43f固定于电极支承部43d。电极支承部43d具有气体入口43a和气体扩散室43b,气体供给部44和气体扩散室43b经由气体入口43a而流体连通。
[0105]
在电极支承部43d和上部电极43e形成有多个气体出口43c,气体扩散室43b和处理空间41s经由多个气体出口43c流体连通。在本实施方式中,上部电极喷淋头组件43构成为能够将1种以上的气体从气体入口43a经由气体扩散室43b和多个气体出口43c供给到处理空间41s内。
[0106]
气体供给部44包括多个气体源440a~440c、多个流量控制器441a~441c和多个阀442a~442c。气体源440a例如是处理气体的供给源,气体源440b例如是清洁气体的供给源,气体源440c例如是非活性气体的供给源。在本实施方式中,非活性气体例如为氮气。流量控制器441a~441c例如能够包含质量流量控制器或者压力控制式的流量控制器。此外,气体供给部44可以包含对1个以上的处理气体的流量进行调制或者使之脉冲化的1个以上的流量调制器。
[0107]
rf功率供给部45将rf功率、例如1个以上的rf信号供给到如下部电极421、上部电极喷淋头组件43、或者下部电极421和上部电极喷淋头组件43这两者这样的1个以上的电极。在本实施方式中,rf功率供给部45包括2个rf生成部450a、450b和2个匹配电路451a、451b。本实施方式中的rf功率供给部45构成为能够将第1rf信号从rf生成部450a经由匹配电路451a供给到下部电极421。rf频谱包含3[hz]~3000[ghz]范围的电磁频谱的一部分。关于如半导体处理这样的电子材料处理,用于等离子体生成的rf频谱的频率优选100[khz]~3[ghz],更优选200[khz]~150[mhz]范围内的频率。例如,第1rf信号的频率可以为27[mhz]~100[mhz]范围内的频率。
[0108]
另外,本实施方式中的rf功率供给部45构成为能够将第2rf信号从rf生成部450b经由匹配电路451b供给到下部电极421。例如,第2rf信号的频率可以为400[khz]~13.56[mhz]范围内的频率。或者,rf功率供给部45可以具有dc(direct current:直流)脉冲生成部而代替rf生成部450b。
[0109]
另外,虽然省略图示,但是此处考虑其他实施方式。例如,也可以构成为在替代实施方式的rf功率供给部45中,rf生成部将第1rf信号供给到下部电极421,其他rf生成部将第2rf信号供给到下部电极421。此外,也可以为其他rf生成部将第3rf信号供给到上部电极喷淋头组件43。此外,在其他替代实施方式中,也可以将dc电压施加到上部电极喷淋头组件43。另外,在各种实施方式中,也可以将1个以上的rf信号(即,第1rf信号、第2rf信号等)的振幅脉冲化或者对其进行调制。振幅调制可以包含在导通状态是断开状态之间、或者多个不同的导通状态之间将rf信号的振幅脉冲化的处理。此外,也可以控制rf信号的相位匹配,可以使多个rf信号的振幅调制的相位匹配同步,也可以不同步。
[0110]
排气系统46例如与设置在腔室41的底部的排气口41e连接。排气系统46可以包含如压力泵、涡轮分子泵、粗抽泵或者它们的组合那样的真空泵。
[0111]
[部件更换装置50]
[0112]
图3是表示部件更换装置50的一例的概略截面图。图4是表示图3所例示的部件更换装置50的a
‑
a截面的一例的图。部件更换装置50包括上部容器510、下部容器511和移动机构56。在上部容器510设置有与处理装置40连接的开口部512a和开闭开口部512a的闸门513a。此外,在上部容器510例如如图4所示设置有与部件收纳装置60连接的开口部512b和开闭开口部512b的闸门513a。此外,在上部容器510设置有与治具收纳装置70连接的开口部512c和开闭开口部512c的闸门513c。开口部512a是第1部件输送口的一例,闸门513a是第1
闸门的一例。此外,开口部512b是第2部件输送口的一例,闸门513b是第2闸门的一例。
[0113]
在上部容器510内设置有操作机器人52a、操作机器人52b和输送机器人53。此外,在下文中,在不区分操作机器人52a和操作机器人52b的每一者而进行总称时,记为操作机器人52。
[0114]
操作机器人52a具有操作臂520a,操作机器人52b具有操作臂520b。在操作臂520a和操作臂520b的前端安装有末端执行器。操作机器人52a和操作机器人52b利用安装于操作臂520a和操作臂520b的前端的末端执行器,进行处理装置40内的感测、消耗部件的取出和消耗部件的安装等作业。
[0115]
输送机器人53具有输送臂530。在输送臂530的前端安装用于保持消耗部件的保持部件。输送机器人53使用安装在输送臂530的前端的保持部件,保持由操作机器人52卸下的消耗部件。然后,输送机器人53将所保持的消耗部件从处理装置40送出,将从处理装置40送出的消耗部件收纳在部件收纳装置60内。此外,输送机器人53使用安装在输送臂530的前端的保持部件,从部件收纳装置60内送出使用前的消耗部件。然后,输送机器人53将从部件收纳装置60送出的使用前的消耗部件送入处理装置40内。送入处理装置40内的使用前的消耗部件由安装于操作臂520a和操作臂520b的前端的末端执行器而被安装在处理装置40内。
[0116]
在下部容器511内设置有排气装置554、气体供给装置556、通信部557、控制部558和存储部559。通信部557例如为无线通信回路,与控制装置20、部件收纳装置60和治具收纳装置70进行无线通信。在部件更换装置50的外侧壁设置有传感器551。传感器551感测部件更换装置50的周围,将感测的结果输出到控制部558。在本实施方式中,传感器551例如为图像传感器,将部件更换装置50周围的图像输出到控制部558。传感器551是第1传感器的一例。
[0117]
排气装置554经由阀552与上部容器510内的空间连接。排气装置554经由阀552吸引上部容器510内的气体,将吸引的气体排出到部件更换装置50的外部。由此,能够将上部容器510内减压至预先设定的真空度。
[0118]
另外,排气装置554经由阀553a和配管550a与开口部512a连接。在将部件更换装置50和处理装置40连接后,排气装置554经由配管550a和阀553a对部件更换装置50与处理装置40的连接部分的空气进行排气。由此,能够在打开闸门513a之前,将部件更换装置50与处理装置40的连接部分减压至预先设定的真空度。
[0119]
图5和图6是表示处理装置40与部件更换装置50的连接部分的一例的放大截面图。在与部件更换装置50连接的处理装置40的腔室41的侧面,设置有凸部410。此外,在与处理装置40连接的部件更换装置50的侧面,设置有与凸部410对应的形状的凹部514。在将处理装置40和部件更换装置50连接的情况下,凸部410和凹部514例如如图6所示的那样嵌合,来帮助处理装置40与部件更换装置50的位置对准。
[0120]
另外,在部件更换装置50的侧面以包围开口部512a的方式配置有o形环等密封部件515。由此,能够提高由腔室41、闸门401、开口部512a和闸门513a包围的空间90的气密性。在将处理装置40和部件更换装置50连接后,经由配管550a对空间90内的气体进行排气,由此能够将空间90内减压至预先设定的真空度。通过对空间90内进行减压,处理装置40与部件更换装置50的连接变得更加牢固。此外,在处理装置40与部件更换装置50的连接被解除的情况下,通过将连接于配管550a的未图示的阀打开,而空间90内的压力恢复至大气压。
[0121]
返回图4继续进行说明。排气装置554经由阀553b和配管550b与开口部512b连接。在将部件更换装置50和部件收纳装置60连接后,排气装置554经由配管550b和阀553b对部件更换装置50与部件收纳装置60的连接部分的空气进行排气。由此,能够在打开闸门513b之前,将部件更换装置50与部件收纳装置60的连接部分减压至预先设定的真空度。此外,在部件更换装置50与部件收纳装置60的连接部分也设置有图5和图6所例示的凹部和凸部,利用这样的凹部和凸部来帮助部件更换装置50与部件收纳装置60的位置对准。
[0122]
另外,排气装置554例如如图4所示,经由阀553c和配管550c与开口部512c连接。在将部件更换装置50与治具收纳装置70连接后,排气装置554经由配管550c和阀553c对部件更换装置50与治具收纳装置70的连接部分的空气进行排气。由此,能够在打开闸门513c之前,将部件更换装置50与治具收纳装置70的连接部分减压至预先设定的真空度。此外,在部件更换装置50与治具收纳装置70的连接部分也设置有图5和图6所例示的凹部和凸部,利用凹部和凸部来帮助部件更换装置50与治具收纳装置70的位置对准。
[0123]
上部容器510经由阀555与气体供给装置556连接。气体供给装置556经由阀555对上部容器510内供给例如氮气等非活性气体。控制部558控制阀555对上部容器510内供给气体,由此将上部容器510内维持为比处理装置40内的压力高的压力。由此,能够抑制处理装置40内的颗粒侵入上部容器510内。阀555是压力调节机构的一例。
[0124]
另外,非活性气体也可以被供给到部件更换装置50与处理装置40的连接部分。由此,产生从部件更换装置50与处理装置40的连接部分去往处理装置40内的气体的流动和从部件更换装置50与处理装置40的连接部分去往部件更换装置50内的气体的流动。由此,能够抑制处理装置40内的颗粒向上部容器510内的侵入,并且能够抑制上部容器510内的颗粒向处理装置40内的侵入。阀552、阀553a~553c和阀555的开闭由控制部558控制。
[0125]
存储部559为rom(read only memory:只读存储器)、hdd(hard disk drive:硬盘驱动器)或者ssd(solid state drive:固态驱动器)等,保存由控制部558使用的数据和程序等。控制部558例如为cpu(central processing unit:中央处理器)、dsp(digital signal processor:数字信号处理器)等处理器,通过读取并执行存储部559内的程序来控制部件更换装置50的各部。
[0126]
控制部558例如通过使用传感器551的感测结果控制移动机构56,来使部件更换装置50移动至从控制装置20指示的处理装置40的位置。控制部558是第1控制部的一例,移动机构56是第1移动机构的一例。
[0127]
移动机构56经由主体560和车轮561。在主体560内设置有电池(battery)等电源、动力源和转向机构等。车轮561通过主体560内的动力源旋转,使部件更换装置50在由主体560内的转向机构控制的方向上移动。此外,移动机构56只要能够使部件更换装置50移动即可,也可以通过步行型等车轮561以外的方法使部件更换装置50移动。
[0128]
[部件收纳装置60]
[0129]
图7是表示部件收纳装置60的一例的概略截面图。部件收纳装置60具有上部容器610、下部容器611和移动机构66。在上部容器610设置有与部件更换装置50连接的开口部612和开闭开口部612的闸门613。在上部容器610内设置有载置台63和驱动部64。在载置台63载置有盒62,该盒62中上下排列地收纳有使用前的多个消耗部件80。在盒62内准备收纳至少1个使用后的消耗部件80的空间。在本实施方式中,在盒62内收纳多个种类的消耗部件
80。消耗部件80例如为边缘环423、上部电极43e等。
[0130]
载置台63通过驱动部64来升降。由此,与部件收纳装置60连接的部件更换装置50内的输送机器人53,能够经由开口部612从盒62内取出使用前的消耗部件80,能够在盒62内收纳使用后的消耗部件80。在盒62内的消耗部件80全部为使用后的消耗部件80的情况下,盒62按每个盒62被更换为收纳有使用前的消耗部件80的盒62。
[0131]
在下部容器611内设置有排气装置652、气体供给装置654、通信部655、控制部656和存储部657。通信部655例如为无线通信回路,与控制装置20和部件更换装置50进行无线通信。在部件收纳装置60的外侧壁设置有传感器650。传感器650感测部件收纳装置60的周围,将感测的结果输出到控制部656。在本实施方式中,传感器650例如为图像传感器,将部件收纳装置60周围的图像输出到控制部656。传感器650是第2传感器的一例。
[0132]
排气装置652经由阀651与上部容器610内的空间连接。排气装置652经由阀651吸引上部容器610内的气体,将吸引的气体排出到部件收纳装置60的外部。由此,能够将上部容器610内减压至预先设定的真空度。
[0133]
气体供给装置654经由阀653与上部容器610连接。气体供给装置654经由阀653对上部容器610内供给例如氮气等非活性气体。通过对上部容器610内供给气体,能够将上部容器610内维持为比部件更换装置50的上部容器510内的压力高的压力。由此,能够抑制部件更换装置50的上部容器510内的颗粒侵入上部容器610内。
[0134]
另外,非活性气体也可以被供给到部件收纳装置60与部件更换装置50的连接部分。由此,产生从部件收纳装置60与部件更换装置50的连接部分去往上部容器610内的气体的流动和从部件收纳装置60与部件更换装置50的连接部分去往上部容器510内的气体的流动。由此,能够抑制部件更换装置50内的颗粒向上部容器610内的侵入,并且能够抑制上部容器610内的颗粒向上部容器510内的侵入。阀651和阀653的开闭由控制部656控制。
[0135]
存储部657为rom、hdd或者ssd等,保存由控制部656使用的数据和程序等。控制部656例如为cpu、dsp等处理器,通过读取并执行存储部657内的程序来控制部件收纳装置60的各部。
[0136]
控制部656例如通过使用传感器650的感测结果控制移动机构66,来使部件收纳装置60移动至从控制装置20指示的与处理装置40连接的部件更换装置50的位置。控制部656是第2控制部的一例,移动机构66是第2移动机构的一例。
[0137]
移动机构66具有主体660和车轮661。在主体660内设置有电池等电源、动力源和转向机构等。车轮661通过主体660内的动力源而旋转,使部件收纳装置60在由主体660内的转向机构控制的方向移动。此外,移动机构66只要能够使部件收纳装置60移动即可,也可以通过步行型等车轮661以外的方法使部件收纳装置60移动。
[0138]
[治具收纳装置70]
[0139]
图8是表示治具收纳装置70的一例的概略截面图。治具收纳装置70具有上部容器710、下部容器711和移动机构76。在上部容器710设置有与部件更换装置50连接的开口部712和开闭开口部712的闸门713。在上部容器710内设置有载置台73和驱动部74。在载置台73载置有盒72,该盒72中上下排列地收纳有多个末端执行器81和多个保持部件82。
[0140]
载置台73通过驱动部74来升降。由此,与治具收纳装置70连接的部件更换装置50内的操作机器人52,能够经由开口部712将盒72内的末端执行器81安装在操作臂520a的前
端。此外,输送机器人53能够经由开口部712将盒72内的保持部件82安装在输送臂530的前端。
[0141]
在下部容器711内设置有排气装置752、气体供给装置754、通信部755、控制部756和存储部757。通信部755例如是无线通信回路,与控制装置20和部件更换装置50进行无线通信。在治具收纳装置70的外侧壁设置有传感器750。传感器750感测治具收纳装置70的周围,将感测的结果输出到控制部756。在本实施方式中,传感器750例如为图像传感器,将治具收纳装置70周围的图像输出到控制部756。
[0142]
排气装置752经由阀751与上部容器710内的空间连接。排气装置752经由阀751吸引上部容器710内的气体,将吸引的气体排出到治具收纳装置70的外部。由此,能够将上部容器710内减压至预先设定的真空度。
[0143]
气体供给装置754经由阀753与上部容器710连接。气体供给装置754经由阀753对上部容器710内供给例如氮气等非活性气体。通过对上部容器710内供给气体,能够将上部容器710内维持为比部件更换装置50的上部容器510内的压力高的压力。由此,能够抑制上部容器510内的颗粒侵入上部容器710内。
[0144]
另外,非活性气体也可以被供给到治具收纳装置70与部件更换装置50的连接部分。由此,产生从治具收纳装置70与部件更换装置50的连接部分去往上部容器710内的气体的流动和从治具收纳装置70与部件更换装置50的连接部分去往上部容器510内的气体的流动。由此,能够抑制部件更换装置50内的颗粒向上部容器710内的侵入,并且能够抑制上部容器710内的颗粒向上部容器510内的侵入。阀751和阀753的开闭由控制部756控制。
[0145]
存储部757为rom、hdd或者ssd等,保存由控制部756使用的数据和程序等。控制部756例如为cpu、dsp等处理器,通过读取并执行存储部757内的程序来控制治具收纳装置70的各部。
[0146]
控制部756例如通过使用传感器750的感测结果控制移动机构76,来使治具收纳装置70移动至从控制装置20指示的与处理装置40连接的部件更换装置50的位置。
[0147]
移动机构76具有主体760和车轮761。在主体760内设置有电池等电源、动力源和转向机构等。车轮761通过主体760内的动力源而旋转,使治具收纳装置70在由主体760内的转向机构控制的方向移动。此外,移动机构76至少能够使治具收纳装置70移动即可,也可以通过步行型等车轮761以外的方法使治具收纳装置70移动。
[0148]
[消耗部件80的更换步骤]
[0149]
接着,参照图9~图18,对消耗部件80的更换步骤进行说明。
[0150]
首先,部件更换装置50、部件收纳装置60和治具收纳装置70根据控制装置20的指示,移动至具有作为更换对象的消耗部件80的处理装置40的位置。然后,部件更换装置50连接到具有作为更换对象的消耗部件80的处理装置40,部件收纳装置60和治具收纳装置70连接到该部件更换装置50。然后,处理装置40、部件更换装置50、部件收纳装置60和治具收纳装置70分别调节内部的压力,打开闸门。
[0151]
而且,例如如图9所示,在操作机器人52a的操作臂520a和操作机器人52b的操作臂520b的前端安装感测用的末端执行器81。感测用的末端执行器81例如是图像传感器、距离传感器等。在处理装置40内安装有使用后的消耗部件80(图9的例中为边缘环423)。在部件收纳装置60的盒62内收纳有使用前的消耗部件80(图9的例中为边缘环423’)。
[0152]
接着,操作机器人52a和操作机器人52b例如如图10所示,使用图像传感器等末端执行器81,对处理装置40内的使用后的边缘环423进行感测。感测结果被输出到部件更换装置50内的控制部558。控制部558基于感测的结果,来判断是否能够进行由操作机器人52a和操作机器人52b执行的边缘环423的更换。在判断为不能进行由操作机器人52a和操作机器人52b执行的边缘环423的更换的情况下,控制部558将该情况通知给制造系统10的操作员等。例如,在边缘环423附着有大量的反应副生成物(所谓的沉积物),或者在边缘环423发生了变形等的情况下,控制部558判断为无法进行由操作机器人52a和操作机器人52b执行边缘环423的更换。控制部558是判断部的一例。
[0153]
在判断为能够进行边缘环423的更换的情况下,例如如图11所示,在操作臂520a和操作臂520b的前端安装用于卸下边缘环423的末端执行器81。此外,在输送机器人53的输送臂530的前端安装用于保持边缘环423的保持部件82。
[0154]
接着,例如如图12所示,操作臂520a和操作臂520b的前端侵入处理装置40内,用操作臂520a和操作臂520b卸下处理装置40内的边缘环423。在边缘环423被卸下的情况下,例如如图13所示,用操作臂520a的前端的末端执行器81和操作臂520b的前端的末端执行器81夹着边缘环423。然后,通过操作臂520a和操作臂520b上升来将边缘环423举起,将边缘环423从下部电极421卸下。
[0155]
然后,例如如图14所示,在被举起的边缘环423与下部电极421之间插入安装在输送臂530的前端的保持部件82。然后,操作臂520a和操作臂520b下降从而将边缘环423载置在保持部件82上。然后,例如如图15所示,操作臂520a和操作臂520b的前端的末端执行器81从边缘环423离开。
[0156]
接着,输送机器人53例如如图16所示,将保持部件82上的使用后的边缘环423收纳在部件收纳装置60的盒62内。然后,输送机器人53将使用前的边缘环423’从盒62内取出,例如如图17所示,送入处理装置40内。此外,也可以在将使用前的边缘环423’从盒62内取出前,对操作臂520a及操作臂520b的前端的末端执行器81和输送臂530的前端的保持部件82进行清洁。由此,能够防止从使用后的边缘环423剥离的沉积物等成为颗粒而经由末端执行器81或者保持部件82附着到使用前的边缘环423。清洁例如考虑通过非活性气体的喷射等进行的气体吹扫。
[0157]
然后,用操作臂520a的前端的末端执行器81和操作臂520b的前端的末端执行器81夹着边缘环423。然后,操作臂520a和操作臂520b上升由此将边缘环423从输送臂530的前端的保持部件82举起。然后,保持部件82从被举起的边缘环423’与下部电极421之间避让,操作臂520a和操作臂520b下降来将边缘环423安装在下部电极421。
[0158]
然后,例如如图18所示,操作臂520a的前端的末端执行器81和操作臂520b的前端的末端执行器81从边缘环423离开。然后,使末端执行器81和保持部件82回到盒72内。然后,将处理装置40、部件更换装置50、部件收纳装置60和治具收纳装置70各自的闸门关闭。然后,处理装置40与部件更换装置50的连接、部件更换装置50与部件收纳装置60的连接、部件更换装置50与治具收纳装置70的连接分别被解除。
[0159]
另外,在更换作为消耗部件80的上部电极43e的情况下,首先,将安装在输送臂530的前端的保持部件82插入上部电极43e的下方。然后,通过输送臂530上升,而保持部件82接触到上部电极43e的下表面。然后,通过安装在操作臂520a和操作臂520b的前端的末端执行
器81,将螺纹件等固定部件43f卸下。由此,用保持部件82将上部电极43e利用输送臂530从处理装置40内送出而将其收纳在部件收纳装置60内。
[0160]
然后,将使用前的上部电极43e从部件收纳装置60内送出并送入处理装置40内,输送到电极支承部43d的下表面的位置。然后,通过安装于操作臂520a和操作臂520b的前端的末端执行器81安装固定部件43f,来将上部电极43e固定在电极支承部43d。这样一来,上部电极43e被更换。
[0161]
[控制装置20的构成]
[0162]
图19是表示控制装置20的一例的框图。控制装置20具有存储部21、控制部22、无线通信部23和有线通信部24。无线通信部23例如是无线通信回路,经由天线25与部件更换装置50、部件收纳装置60和治具收纳装置70分别进行无线通信。有线通信部24例如是nic(network interface card:网络接口卡)等,与各个处理组30进行通信。此外,控制装置20也可以与各个处理组30进行无线通信。
[0163]
存储部21是rom、hdd或者ssd等,保存由控制部22使用的数据和程序等。在存储部21内保存例如如图20所示那样的管理表210。
[0164]
图20是表示管理表210的一例的图。在管理表210中,按识别各个处理装置40的处理装置id211的每一者,保存单表212。在单表212内保存部件id、更换日期和时间、rf累计时间和下一次更换时期。部件id是识别各个消耗部件80的信息。更换日期和时间是进行了消耗部件80的更换的时刻。rf累计时间是使用rf信号表示在处理装置40中进行的处理的累计时间的信息。下一次更换时期是下次更换消耗部件80的日期和时间。
[0165]
控制部22例如为cpu、dsp等处理器,读取并执行存储部21内的程序,来控制控制装置20整体。
[0166]
[控制装置20的处理]
[0167]
图21和图22是表示控制装置20的处理的一例的流程图。图21例示了选择使之向具有作为更换对象的消耗部件80的处理装置40的位置移动的部件更换装置50、部件收纳装置60和70时,控制装置20的处理的一例。图22例示了使部件更换装置50、部件收纳装置60和70移动到消耗部件80的更换对象的处理装置40的位置后,控制装置20的处理的一例。图21和图22所例示的处理通过控制装置20的控制部22执行从存储部21读取的程序来实现。此外,图22例示了控制装置20、1个处理装置40和1个部件更换装置50之间的处理。
[0168]
在图21所例示的处理中,首先,控制部22判断在从当前时刻起预先设定的时间以内,是否有更换时期到来的消耗部件80(s100)。控制部22例如参照管理表210的“下一次更换时期”的栏,判断从当前时刻起预先设定的时间以内是否有更换时期到来的消耗部件80。在从当前时刻起预先设定的时间以内没有更换时期到来的消耗部件80的情况下(s100:否(no)),控制部22再次执行步骤s100所示的处理。
[0169]
另一方面,在从当前时刻起预先设定的时间以内有更换时期到来的消耗部件80的情况下(s100),确定未被分配更换作业的部件更换装置50、部件收纳装置60和治具收纳装置70。然后,控制部22对所确定的部件更换装置50、部件收纳装置60和治具收纳装置70进行指示,使得向在预先设定的时间以内有更换时期到来的消耗部件80的处理装置40的位置移动(s101)。然后,控制部22再次执行步骤s100所示的处理。
[0170]
在图22中例示的处理中,首先,控制部22判断在处理装置40中是否执行了使用rf
功率的处理(s200)。在没有执行使用rf功率的处理的情况下(s200:否),控制部22再次执行步骤s200所示的处理。
[0171]
另一方面,在执行了使用rf功率的处理的情况下(s200:是(yes)),控制部22在管理表210内中,更新与进行了使用rf功率的处理的处理装置40的处理装置id211对应的单表212内的所有“rf累计时间”。然后,控制部22对更新了“rf累计时间”的单表212内的所有消耗部件80推断“下一次更换时期”,用推断出的“下一次更换时期”更新单表212内的所有消耗部件80的“下一次更换时期”(s201)。由此,根据使用rf功率的实际处理时间,更新与各个消耗部件80对应的“下一次更换时期”。
[0172]
接着,控制部22基于更新后的“下一次更换时期”,判断消耗部件80的更换时期之前的最后批次的处理是否结束(s202)。在处理装置40中消耗部件80的更换时期之前的最后批次的处理没有结束的情况下(s202:否),控制部22再次执行步骤s200所示的处理。
[0173]
另一方面,在处理装置40中消耗部件80的更换时期之前的最后批次的处理结束了的情况下(s202:是),控制部22对处理装置40指示消耗部件80的更换准备(s203)。在消耗部件80的更换准备中,执行腔室41内的处理气体的排气、腔室41内的清洁和腔室41内的压力调节等处理。
[0174]
接着,控制部22判断是否从部件更换装置50接收到了连接通知(s204)。此外,部件更换装置50通过图21所例示的处理而开始向具有作为更换对象的消耗部件80的处理装置40的位置移动。在没有从部件更换装置50接收到连接通知的情况下(s204:否),控制部22再次执行步骤s204所示的处理。
[0175]
另一方面,在从部件更换装置50接收到了连接通知的情况下(s204:是),控制部22对部件更换装置50进行指示,使得将处理装置40与部件更换装置50的连接部分的空间90内的气体排气(s205)。部件更换装置50的控制部558控制阀553a和排气装置554a,将处理装置40与部件更换装置50的连接部分的空间90内的气体排气。
[0176]
接着,控制部22基于处理装置4所具有的传感器的测量值,来判断处理装置40内的压力p是否成为预先设定的压力p1(s206)。在处理装置40内的压力p没有成为压力p1的情况下(s206:否),控制部22再次执行步骤s206所示的处理。
[0177]
在处理装置40内的压力p成为压力p1的情况下(s206:是),控制部22对部件更换装置50发送要求将闸门513a开放的门开放要求(s207)。然后,控制部22判断是否从部件更换装置50接收到了表示闸门513a的开放完成的门开放通知(s208)。在没有接收到门开放通知的情况下(s208:否),控制部22再次执行步骤s208所示的处理。
[0178]
另一方面,在接收到了门开放通知的情况下(s208:是),控制部22控制处理装置40以将闸门401开放(s209)。然后,控制部22将指示消耗部件80的更换开始的更换开始指示发送到部件更换装置50(s210)。
[0179]
另外,在步骤s210中发送了更换开始指示后,用部件更换装置50开始消耗部件80的更换。此时,控制部22可以在从送出使用后的消耗部件80之后至送入使用前的消耗部件80为止的期间,控制处理装置40以对腔室41内进行清洁。由此,能够在送入使用前的消耗部件80之前,除去在送出使用后的消耗部件80时从消耗部件80剥离而落到腔室41内的沉积物等。
[0180]
接着,控制部22判断是否从部件更换装置50接收到了表示消耗部件80的更换完成
的更换完成通知(s211)。在没有从部件更换装置50接收到更换完成通知的情况下(s211:否),控制部22再次执行步骤s211所示的处理。
[0181]
另一方面,在从部件更换装置50接收到了更换完成通知的情况下(s211:是),控制部22控制处理装置40以将闸门401关闭(s212)。然后,控制部22将更换确认通知发送到部件更换装置50(s213)。然后,控制部22对部件更换装置50发出指示,使得处理装置40与部件更换装置50的连接部分的空间90内的气体的排气停止(s214)。部件更换装置50的控制部558控制阀553a和排气装置554a,使处理装置40与部件更换装置50的连接部分的空间90内的气体的排气停止,使空间90内回到大气压。
[0182]
接着,控制部22在管理表210内的单表212中,删除包含已更换的使用后的消耗部件80的“部件id”的记录。然后,控制部22在管理表210内新生成包含与使用后的消耗部件80进行了更换的使用前的消耗部件80的“部件id”的记录(s215)。在新生成的记录中,在“更换日期和时间”一栏登记当前的日期和时间,在“rf累计时间”的栏登记为0。
[0183]
然后,控制部22推断已更换的使用前的消耗部件80的更换时期,将推断出的更换时期登记在新生成的记录的“下一次rf累计时间”中(s216)。然后,控制部22再次执行步骤s200所示的处理。
[0184]
[部件更换装置50的处理]
[0185]
图23和图24是表示部件更换装置50的处理的一例的流程图。部件更换装置50例如从控制装置20被指示向具有作为更换对象的消耗部件80的处理装置40的位置的移动。在开始向该处理装置40的位置移动的情况下,开始在图23和图24所例示的处理。图23和图24所例示的处理通过控制部558执行从存储部559读取出的程序来实现。
[0186]
首先,控制部558控制阀552和排气装置554,开始上部容器510内的气体的排气,由此开始上部容器510内的压力的调节(s300)。然后,控制部558基于传感器551的感测结果,判断部件更换装置50是否已连接到处理装置40(s301)。在部件更换装置50没有连接到处理装置40连接的情况下(s301:否),控制部558再次执行步骤s301所示的处理。
[0187]
另一方面,在部件更换装置50已连接到处理装置40的情况下(s301:是),控制部558判断部件更换装置50是否已与部件收纳装置60和治具收纳装置70(s302)。控制部558例如判断是否从部件收纳装置60和治具收纳装置70接收到了表示已连接到部件更换装置50的连接通知,由此判断部件更换装置50是否已与部件收纳装置60和治具收纳装置70连接。在部件更换装置50没有与部件收纳装置60和治具收纳装置70连接的情况下(s302:否),控制部558再次执行步骤s302所示的处理。
[0188]
另一方面,在部件更换装置50已与部件收纳装置60和治具收纳装置70连接的情况下(s302:是),控制部558控制阀555和气体供给装置556,对上部容器510内供给非活性气体。然后,控制部558判断上部容器510内的压力p是否成为预先设定的压力p2(s303)。在本实施方式中,压力p2是比在更换消耗部件80时被调节的处理装置40内的压力p1高的压力。在上部容器510内的压力p没有成为压力p2的情况下(s303:否),控制部558再次执行步骤s303所示的处理。
[0189]
另一方面,在上部容器510内的压力p成为了压力p2的情况下(s303:是),控制部558使与部件收纳装置60之间的闸门513b和与治具收纳装置70之间的闸门513c开放(s304)。然后,控制部558控制操作机器人52a和操作机器人52b,将操作臂520a和操作臂
520b的前端插入治具收纳装置70的盒72内。然后,控制部558在操作臂520a和操作臂520b的前端安装感测用的末端执行器81(s305)。然后,控制部558经由通信部557将表示部件更换装置50已连接到处理装置40的连接通知发送到控制装置20(s306)。
[0190]
接着,控制部558判断是否经由通信部557从控制装置20接收到了门开放要求(s307)。在没有接收门开放要求的情况下(s307:否),控制部558再次执行步骤s307所示的处理。另一方面,在接收到了门开放要求的情况下(s307:是),控制部558使部件更换装置50与处理装置40之间的闸门513a开放(s308)。
[0191]
接着,控制部558判断是否经由通信部557从控制装置20接收到了更换开始指示(s309)。在没有接收到更换开始指示的情况下(s309:否),控制部558再次执行步骤s309所示的处理。另一方面,在接收到了更换开始指示的情况下(s309:是),控制部558控制在前端安装有感测用的末端执行器81的操作臂520a和操作臂520b,对处理装置40内进行感测(s310)。在步骤s309中,进行表示处理装置40内的消耗部件80的状态的信息的获取、部件更换装置50内的基准位置与处理装置40内的基准位置的位置对准(指导:teaching)等。
[0192]
接着,控制部558基于步骤s309的感测的结果,判断是否能够进行从控制装置20指示的消耗部件80的更换(s311)。在由于消耗部件80附着有大量的沉积物,或者消耗部件80发生了变形等而判断为无法进行消耗部件80的更换的情况下(s311:否),控制部558经由通信部557向控制装置20通知错误(s312)。于是,本流程图所示的处理结束。此外,在被通知了错误的情况下,控制装置20向制造系统10的操作员通知错误。操作员对作业者指示通过手动作业进行的消耗部件80的更换。此外,在从控制装置20了通知错误的情况下,操作员可以从部件更换装置50获取感测结果。然后,操作员也可以使用感测结果,对操作机器人52a、操作机器人52b和输送机器人53进行遥控操作,由此执行消耗部件80的更换作业。
[0193]
另一方面,在判断为能够进行消耗部件80的更换的情况下(s311:是),控制部558控制操作机器人52a和操作机器人52b,从操作臂520a和操作臂520b的前端卸下感测用的末端执行器81。然后,控制部558在操作臂520a和操作臂520b的前端安装用于进行消耗部件80的安装和卸下的末端执行器81(图24的s312)。然后,控制部558控制输送机器人53,在输送臂530的前端安装保持部件82(s313)。
[0194]
接着,控制部558将操作臂520a和操作臂520b的前端插入处理装置40内,控制在前端安装有末端执行器81的操作臂520a和操作臂520b,将使用后的消耗部件80(s313)。
[0195]
接着,控制部558控制输送机器人53,将输送臂530的前端的保持部件82插入由操作臂520a和操作臂520b卸下的消耗部件80之下。然后,控制操作机器人52a和操作机器人52b,使保持部件82保持所卸下的消耗部件80。然后,控制部558控制输送机器人53,将使用后的消耗部件80从处理装置40内送出(s315)。然后,控制部558控制输送机器人53,将使用后的消耗部件80收纳在部件收纳装置60的盒62内。
[0196]
接着,控制部558控制输送机器人53,将使用前的消耗部件80从部件收纳装置60的盒62内取出,送入处理装置40内(s316)。然后,控制部558控制操作机器人52a和操作机器人52b,将保持部件82所保持的使用前的消耗部件80举起。然后,控制部558控制输送机器人53,使输送臂530从处理装置40内避让。然后,控制部558控制操作机器人52a和操作机器人52b,安装使用前的消耗部件80(s317)。然后,控制部558控制操作机器人52a和操作机器人52b,使操作臂520a和操作臂520b从处理装置40内避让。
[0197]
接着,控制部558关闭闸门513a、闸门513b和闸门513c(s318)。然后,控制部558控制阀552和排气装置554,使上部容器510内的气体的排气停止,控制阀555和气体供给装置556,停止向上部容器510内供给非活性气体。此外,控制部558控制阀553a、阀553b和阀553c,使与部件更换装置50的连接部分的气体的排气停止。然后,控制部558经由通信部557向控制装置20、部件收纳装置60和治具收纳装置70发送表示消耗部件80的更换已完成的更换完成通知(s319)。于是,本流程图所示的处理结束。
[0198]
[部件收纳装置60的处理]
[0199]
图25是表示部件收纳装置60的处理的一例的流程图。部件收纳装置60例如从控制装置20被指示向具有作为更换对象的消耗部件80的处理装置40的位置的移动,在开始向该处理装置40的位置移动的情况下,开始图25所例示的处理。图25所例示的处理通过控制部656执行从存储部657读取出的程序来实现。
[0200]
首先,控制部656控制阀651和排气装置652,开始上部容器610内的气体的排气,由此开始上部容器610内的压力的调节(s400)。然后,控制部656基于传感器650的感测结果,判断部件收纳装置60是否已连接到部件更换装置50(s401)。在部件收纳装置60没有连接到部件更换装置50的情况下(s401:否),控制部656再次执行步骤s401所示的处理。
[0201]
另一方面,在部件收纳装置60以连接到部件更换装置50的情况下(s401:是),控制部656将表示部件收纳装置60以连接到部件更换装置50的连接通知发送到部件更换装置50(s402)。然后,控制部656控制阀653和气体供给装置654,对上部容器610内供给非活性气体。然后,控制部656判断上部容器610内的压力p是否成为了预先设定的压力p3(s403)。在本实施方式中,压力p3是比在更换消耗部件80时被调节的部件更换装置50内的压力p2高的压力。在上部容器610内的压力p没有成为压力p3的情况下(s403:否),控制部656再次执行步骤s403所示的处理。
[0202]
另一方面,在上部容器610内的压力p成为了压力p3的情况下(s403:是),控制部656将闸门613开放(s404)。然后,控制部656与由部件更换装置50的输送机器人53进行的使用后的消耗部件80的送入和使用前的消耗部件80的送出相应地控制驱动部64,使盒62升降(s405)。
[0203]
接着,控制部656判断是否经由通信部655从部件更换装置50接收到了更换完成通知(s406)。在没有接收到更换完成通知的情况下(s406:否),控制部656再次执行步骤s405所示的处理。另一方面,在接收到了更换完成通知的情况下(s406:是),控制部656将闸门613关闭(s406)。然后,控制部656控制阀651和排气装置652,使上部容器610内的气体的排气停止,控制阀653和气体供给装置654,停止向上部容器610内的非活性气体的供给。于是,本流程图所示的处理结束。
[0204]
[治具收纳装置70的处理]
[0205]
治具收纳装置70的处理能够使用图25来说明,因此参照图25进行说明。治具收纳装置70例如从控制装置20被指示向具有作为更换对象的消耗部件80的处理装置40的位置的移动,在开始向该处理装置40的位置的移动的情况下,开始图25所例示的处理。图25所例示的处理通过控制部756执行从存储部757读取出的程序来实现。
[0206]
首先,控制部756控制阀751和排气装置752,开始上部容器710内的气体的排气,由此开始上部容器710内的压力的调节(s400)。然后,控制部756基于传感器750的感测结果,
判断治具收纳装置70是否已连接到部件更换装置50(s401)。在治具收纳装置70没有连接到部件更换装置50的情况下(s401:否),控制部756再次执行步骤s401所示的处理。
[0207]
另一方面,在治具收纳装置70已连接到部件更换装置50的情况下(s401:是),控制部756将表示治具收纳装置70以连接到部件更换装置50的连接通知发送到部件更换装置50(s402)。然后,控制部756控制阀753和气体供给装置754,对上部容器710内供给非活性气体。然后,控制部756判断上部容器710内的压力p是否成为了预先设定的压力p3(s403)。在上部容器710内的压力p没有成为压力p3的情况下(s403:否),控制部756再次执行步骤s403所示的处理。
[0208]
另一方面,在上部容器710内的压力p成为了压力p3的情况下(s403:是),控制部756将闸门713开放(s404)。然后,控制部756与由部件更换装置50的输送机器人53进行的末端执行器81和保持部件82的出入相应地控制驱动部74,使盒72升降(s405)。
[0209]
接着,控制部756判断是否经由通信部755从部件更换装置50接收到了更换完成通知(s406)。在没有接收到更换完成通知的情况下(s406:否),控制部756再次执行步骤s405所示的处理。另一方面,在接收到了更换完成通知的情况下(s406:是),控制部756将闸门713关闭(s406)。然后,控制部756控制阀751和排气装置752,使上部容器710内的气体的排气停止,控制阀753和气体供给装置754,停止向上部容器710内的非活性气体的供给。于是,本流程图所示的处理结束。
[0210]
以上,对一个实施方式进行了说明。如上所述,本实施方式为进行消耗部件80的更换的制造系统10,其包括部件更换装置50和部件收纳装置60。部件收纳装置60收纳使用前的消耗部件80。部件更换装置50与处理装置40和部件收纳装置60连接,将安装于该处理装置40内的使用后的消耗部件80和收纳于部件收纳装置60内的使用前的消耗部件80进行交换。此外,部件更换装置50能够移动至安装有作为更换对象的消耗部件80的处理装置40的位置,与该处理装置40连接。此外,部件收纳装置60能够移动至与安装有作为更换对象的消耗部件80的处理装置40连接的部件更换装置50的位置,与该部件更换装置50连接。由此,能够削减半导体装置的制造系统10的设置面积。
[0211]
另外,上述的实施方式中的部件更换装置50具有操作机器人52和输送机器人53。输送机器人53经由部件更换装置50在处理装置40与部件收纳装置60之间输送消耗部件80。操作机器人52从处理装置40内卸下使用后的消耗部件80并将其载置在输送机器人53,将载置于输送机器人53的使用前的消耗部件80安装在处理装置40内。由此,能够将使用后的消耗部件80与使用前的消耗部件80进行更换。
[0212]
另外,上述的实施方式中的制造系统10还包括治具收纳装置70。治具收纳装置70收纳能够安装于操作机器人52的前端的末端执行器81,并能够行驶至与安装有作为更换对象的消耗部件80的处理装置40连接的部件更换装置50的位置,与该部件更换装置50连接。操作机器人52将适合于更换作为更换对象的消耗部件80的末端执行器81从治具收纳装置70取出并安装,使用所安装的末端执行器81进行作为更换对象的消耗部件80的更换。通过更换安装在操作机器人52的前端的末端执行器81,能够用1个操作机器人52进行不同种类的消耗部件80的更换。
[0213]
另外,在上述的实施方式中,末端执行器81包含传感器。操作机器人52在更换消耗部件80之前,使用安装于前端的传感器对处理装置40内的状态进行感测。部件更换装置50
具有控制部558,该控制部558基于操作机器人52的感测的结果判断是否能够进行消耗部件80的更换,在能够进行消耗部件80的更换的情况下使操作机器人52执行消耗部件80的更换,在不能进行消耗部件80的更换的情况下将该情况通知给操作员。由此,能够进行消耗部件80的更换。
[0214]
另外,在上述的实施方式中,治具收纳装置70收纳能够安装在输送机器人53的前端的保持部件82。输送机器人53将用于更换作为更换对象的消耗部件80的保持部件82从治具收纳装置70取出并安装,使用所安装的保持部件82进行作为更换对象的消耗部件80的输送。通过替换安装在输送机器人53的前端的保持部件82,能够用1个输送机器人53进行不同种类的消耗部件80的更换。
[0215]
另外,在上述的实施方式中,部件收纳装置60收纳多个种类的使用前的消耗部件80,且每种收纳至少1个以上。由此,能够迅速地进行消耗部件80的更换。
[0216]
另外,上述的实施方式中的部件更换装置50具有控制部件更换装置50内的压力的阀555。阀555在进行安装于处理装置40内的使用后的消耗部件80的更换时控制部件更换装置50内的压力,以使得部件更换装置50内的压力变得比处理装置40内的压力高。由此,能够抑制处理装置40内的颗粒侵入部件更换装置50内。
[0217]
另外,在上述的实施方式中,部件更换装置50具有移动机构56、传感器551和控制部558,部件收纳装置60具有移动机构66、传感器650和控制部656。移动机构56具有动力源,能够使部件更换装置50移动。传感器551对部件更换装置50的周围进行感测。控制部558使用传感器551的感测结果控制移动机构56,来使部件更换装置50移动至安装有作为更换对象的消耗部件80的处理装置40的位置。移动机构66具有动力源,能够使部件收纳装置60移动。传感器650对部件收纳装置60的周围进行感测。控制部656使用传感器650的感测结果控制移动机构66,来使部件收纳装置60移动至与安装有作为更换对象的消耗部件80的处理装置40连接的部件更换装置50的位置。由此,部件更换装置50和部件收纳装置60能够各自独立地移动。
[0218]
另外,上述的实施方式是进行消耗部件80的更换的部件更换装置50,其包括开口部512a、开口部512b、输送机器人53和移动机构56。开口部512a与处理装置40经由闸门513a连接。开口部512b与收纳使用前的消耗部件80的部件收纳装置60经由闸门513b连接。操作机器人52将安装于处理装置40内的使用后的消耗部件80与收纳于部件收纳装置60内的使用前的消耗部件80进行更换。移动机构56使部件更换装置50移动至安装有作为更换对象的消耗部件80的处理装置40的位置。此外,部件更换装置50和部件收纳装置60能够彼此独立对移动。由此,能够削减半导体装置的制造系统10的设置面积。
[0219]
[另外]
[0220]
另外,本发明公开的技术不限于上述的实施方式,在其主旨的范围内能够进行各种变形。
[0221]
例如,在上述的实施方式中,在部件收纳装置60的盒62内收纳多个种类的消耗部件80,但是公开的技术不限于此。作为其他方式,也可以在盒62内收纳多个同一种类的消耗部件80。而且,也可以为,部件收纳装置60按照盒62内收纳的消耗部件80的种类来准备。由此,在盒62内收纳更换周期大致相同的消耗部件80,能够抑制部件收纳装置60的闸门613徒劳地开放。由此,能够抑制颗粒附着到盒62内的使用前的消耗部件80。
[0222]
另外,在上述的实施方式中,部件更换装置50的操作机器人52和输送机器人53与使用前的消耗部件80和使用后的消耗部件80接触,但是公开的技术不限于此。作为其他方式,也可以在部件更换装置50内分别设置与使用前的消耗部件80接触的操作机器人52和输送机器人53、以及与使用后的消耗部件80接触的操作机器人52和输送机器人53。由此,能够防止从使用后的消耗部件80剥离的沉积物等成为颗粒而经由操作机器人52或者输送机器人53附着到使用前的消耗部件80。
[0223]
另外,在上述的实施方式中,在部件收纳装置60的盒62内收纳使用前的消耗部件80和使用后的消耗部件80,但是公开的技术不限于此。作为其他方式,也可以为,盒62内被分隔为收纳使用前的消耗部件80的空间和收纳使用后的消耗部件80的空间。由此,能够防止从使用后的消耗部件80剥离的沉积物成为颗粒附着到使用前的消耗部件80。
[0224]
另外,在上述的实施方式中,部件更换装置50、部件收纳装置60和治具收纳装置70在从控制装置20接收到指示后开始装置内的排气,但是公开的技术不限于此。例如,也可以为,部件更换装置50、部件收纳装置60和治具收纳装置70在从控制装置20接收到指示之前,就执行排气使得装置内的压力成为预先设定的压力p。由此,能够更迅速地开始消耗部件80的更换。
[0225]
另外,在上述的实施方式的部件更换装置50、部件收纳装置60和治具收纳装置70中,由排气装置排出的气体被排出到各装置的外部,但是公开的技术不限于此。例如,也可以为,各装置与处理设置于各装置外部的排出气体的气体处理装置通过可挠性的软管连接,从各装置被排出的气体被输送气体处理装置。由此,能够促进从各装置被排出的气体的回收利用。
[0226]
另外,在上述的实施方式的部件更换装置50、部件收纳装置60和治具收纳装置70中,各装置内的气体通过各装置内的排气装置被排气,但是公开的技术不限于此。例如,也可以为,各装置与处理设置于各装置外部的排气装置通过可挠性的软管连接,通过该排气装置对各装置内的气体进行排气。由此,由此,能够使部件更换装置50、部件收纳装置60和治具收纳装置70小型化。
[0227]
另外,在上述的实施方式中,用同一部件更换装置50将使用后的消耗部件80从处理装置40内送出,并将使用前的消耗部件80送入处理装置40内。但是,公开的技术不限于此。例如,也可以分别准备将使用后的消耗部件80从处理装置40内送出的部件更换装置50和将使用前的消耗部件80送入处理装置40内的部件更换装置50。由此,能够防止从使用后的消耗部件80剥离的沉积物成为颗粒而附着到使用前的消耗部件80。
[0228]
另外,在该情况下,将使用前的消耗部件80送入处理装置40内的部件更换装置50也可以与真空输送室31、大气输送室33连接。与真空输送室31连接的部件更换装置50对真空输送室31内的机械臂310交送使用前的消耗部件80。机械臂310将接收到的使用前的消耗部件80送入需要更换消耗部件80的处理装置40内。此外,与大气输送室33连接的部件更换装置50对大气输送室33内的机械臂330交送使用前的消耗部件80。机械臂330将使用前的消耗部件80送入负载锁定室32内。送入到负载锁定室32内的使用前的消耗部件80由真空输送室31内的机械臂310送入需要更换消耗部件80的处理装置40内。在部件更换装置50与大气输送室33连接的情况下,不需要在部件更换装置50、部件收纳装置60和治具收纳装置70内设置排气装置,就能够使各装置小型化。
[0229]
另外,在上述的各实施方式中,也可以为,部件更换装置50在与处理装置40连接的情况下,通过来自处理装置40的电源供给,对移动机构56内的蓄电池进行充电。此外,也可以为,部件收纳装置60和治具收纳装置70经由与处理装置40连接的部件更换装置50对移动机构66和移动机构76内的电池进行充电。
[0230]
另外,本次公开的实施方式在所有方面均为例示而不应认为是限制性的。实际上,上述实施方式能够通过各种方式具体实现。此外,上述实施方式在不脱离所附的权利要求的范围及其思想的情况下,能够以各种方式省略、替换和改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1