一种点胶贴合固化一体机的制作方法
1.本发明涉及芯片生产设备技术领域,尤其涉及一种点胶贴合固化一体机。
背景技术:
2.在生产制造芯片时,通常需要在芯片的表面经过点胶处理后贴上玻璃并进行uv固化处理。由于单个芯片的规格小,为了能提高芯片的生产效率和贴合精度,现有的方法是通过均匀分布有芯片的晶圆和与晶圆尺寸相匹配的玻璃进行贴合以及uv固化处理。然而,上述生产步骤需要在多台人工操作的设备中单独完成,且每台设备只能完成其中一道工序,人工成本高,生产效率低。
技术实现要素:
3.本发明的目的在于提出一种点胶贴合固化一体机,能将产品制造中所需的多个设备集成在一起,实现整个生产制造过程中的自动化,提高生产效率,降低生产成本。
4.为实现上述技术效果,本发明的技术方案如下:
5.一种点胶贴合固化一体机,包括:
6.工作平台;
7.点胶装置,所述点胶装置设置在所述工作平台上,用于对第一工件进行涂胶;
8.贴合装置,所述贴合装置设置在所述工作平台上,并位于所述点胶装置的一侧,所述贴合装置用于将已进行涂胶处理的所述第一工件和第二工件贴合并进行预固化处理,所述第一工件和所述第二工件贴合并进行预固化处理后形成半成品;
9.固化装置,所述固化装置设置在所述贴合装置远离所述点胶装置的一侧,所述固化装置用于将所述半成品进行固化处理,所述半成品进行固化处理后形成成品;
10.搬运装置,所述搬运装置用于分别取放和移动所述第一工件、所述第二工件、所述半成品和所述成品。
11.作为一种点胶贴合固化一体机的可选方案,所述点胶贴合固化一体机还包括存储柜、第一过渡舱和第二过渡舱,所述存储柜设置在所述固化装置和所述工作平台之间;所述第一过渡舱位于所述点胶装置远离所述贴合装置的一侧;所述第二过渡舱设置在所述存储柜远离所述固化装置的一侧上并位于所述工作平台上方,所述搬运装置包括:
12.第一取料机构,所述第一取料机构可移动地设置在所述工作平台上,且位于所述点胶装置远离所述贴合装置的一侧,用于将所述第一工件从第一过渡舱中取出并转移到中转载台上;
13.第二取料机构,所述第二取料机构可移动地设置在固化装置上,所述第二取料机构能将所述第二工件从所述存储柜中取出并转移到第二过渡舱上,所述第二取料机构还能将所述半成品从所述第二过渡舱中转移到固化装置内,所述第二取料机构还能将所述成品从所述固化装置中取出并放置到所述存储柜内;
14.搬运翻转机构,所述搬运翻转机构可移动地设置在所述工作平台上,并位于所述
点胶装置和贴合装置的前方,所述搬运翻转机构能依次将所述第一工件从所述中转载台转移到所述点胶装置再转移到所述贴合装置处,所述搬运翻转机构还能将所述第二工件从所述第二过渡舱中取出并翻转180度后转移到所述贴合装置处,所述搬运翻转机构还能将所述半成品从所述贴合装置处取出并转移到所述第二过渡舱内。
15.作为一种点胶贴合固化一体机的可选方案,所述点胶装置包括:
16.载台机构,所述载台机构设置在所述工作平台上,所述载台机构用于承载所述第一工件并能带动所述第一工件旋转和升降;
17.第一涂胶机构,所述第一涂胶机构位于所述载台机构的上方,用于在所述第一工件上涂布框胶以在所述第一工件上形成框胶区域;
18.第二涂胶机构,所述第二涂胶机构位于所述载台机构的上方,用于在所述第一工件的所述框胶区域内涂布面胶。
19.作为一种点胶贴合固化一体机的可选方案,所述点胶装置还包括:截面积检测机构,所述截面积检测机构设置在所述载台机构的一侧,用于检测所述框胶区域的截面积。
20.作为一种点胶贴合固化一体机的可选方案,所述点胶装置还包括:
21.第一擦胶机构,所述第一擦胶机构位于所述第一涂胶机构下方,用于擦除所述第一涂胶机构的出胶位置的胶水;
22.第二擦胶机构,所述第二擦胶机构位于苏所述第二涂胶机构下方,用于擦除所述第二涂胶机构的出胶位置的胶水。
23.作为一种点胶贴合固化一体机的可选方案,所述点胶装置还包括观墨机构,所述观墨机构设置在所述第二涂胶机构的第二喷头下方,用于检测所述第二涂胶机构的第二喷头是否发生堵塞。
24.作为一种点胶贴合固化一体机的可选方案,所述点胶装置还包括称重机构,所述称重机构与第二涂胶机构的第二喷头连接,用于控制所述第二涂胶机构的第二喷头每次工作时的胶水量。
25.作为一种点胶贴合固化一体机的可选方案,所述点胶贴合固化一体机还包括寻边机构,所述寻边机构位于所述点胶装置的载台机构上方,所述寻边机构能分别对所述第一工件和所述第二工件进行寻边定位。
26.作为一种点胶贴合固化一体机的可选方案,所述贴合装置包括:
27.固定支架,所述固定支架安装在所述工作平台上,
28.上贴合机构,所述上贴合机构安装在所述固定支架上,所述上贴合机构能吸附所述第二工件;
29.下贴合机构,所述下贴合机构和所述上贴合机构相对设置,所述下贴合机构能承载所述第一工件并调整所述第一工件的相对位置,且所述下贴合机构和所述上贴合机构之间的间距可调,当所述上贴合机构和所述下贴合机构之间间距为零时能形成密封腔体,以使所述第二工件和所述第一工件在所述密封腔体内贴合形成半成品;
30.预固化机构,所述预固化机构设置在所述上贴合机构和所述下贴合机构之间,用于对所述半成品进行预固化处理。
31.作为一种点胶贴合固化一体机的可选方案,所述固化装置包括:
32.固化载台,用于承载所述半成品;
33.固化灯,所述固化灯位于所述固化载台的一侧,用于对所述半成品照射紫外线进行固化处理。
34.本发明的有益效果为:本发明提供了一种点胶贴合固化一体机,使用时,通过搬运装置抓取并移动第一工件至点胶装置处进行涂胶处理后移动至贴合装置处,再抓取并移动第二工件移动至贴合装置处使第一工件和第二工件完成贴合以及预固化处理进而形成半成品,最后抓取并移动半成品至固化装置处进行固化以形成所需的成品。与现有技术相比,该点胶贴合固化一体机将产品制造中所需的多个设备集成在一起,实现整个生产制造过程中的自动化,提高生产效率,降低生产成本。
35.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
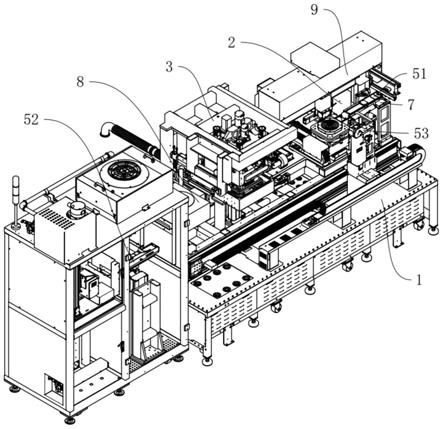
36.图1是本发明具体实施方式提供的点胶贴合固化一体机的结构示意图;
37.图2是本发明具体实施方式提供的点胶贴合固化一体机隐去罩体后的结构示意图一;
38.图3是本发明具体实施方式提供的点胶贴合固化一体机隐去罩体后的结构示意图二;
39.图4是本发明具体实施方式提供的第一取料机构的结构示意图;
40.图5是本发明具体实施方式提供的第二取料机构的结构示意图;
41.图6是本发明具体实施方式提供的搬运翻转机构的结构示意图;
42.图7是本发明具体实施方式提供的点胶装置的结构示意图一;
43.图8是本发明具体实施方式提供的点胶装置的结构示意图二;
44.图9是本发明具体实施方式提供的第一涂胶机构的结构示意图;
45.图10是本发明具体实施方式提供的第二涂胶机构的结构示意图;
46.图11是本发明具体实施方式提供的第一擦胶机构的结构示意图;
47.图12是本发明具体实施方式提供的第二擦胶机构和观墨机构的结构示意图;
48.图13是本发明具体实施方式提供的称重机构的结构示意图;
49.图14是本发明具体实施方式提供的贴合装置的结构示意图;
50.图15是本发明具体实施方式提供的固化装置的结构示意图。
51.附图标记:
52.1、工作平台;11、罩体;
53.2、点胶装置;
54.21、载台机构;211、第一滑轨;212、旋转载台;2121、本体;2122、升降载台;
55.22、第一涂胶机构;221、第一喷头;222、测高件;223、第四升降模组;224、第一照相定位模组;
56.23、第二涂胶机构;231、第二喷头;232、供墨组件;233、第五升降模组;234、第二照相定位模组;
57.24、截面积检测机构;241、第一立柱;242、激光检测头;
58.25、第一擦胶机构;251、第一立板;252、第一放卷轮;253、第一收卷轮;254、接胶
杯;
59.26、第二擦胶机构;261、第二立板;262、第二放卷轮;263、第二收卷轮;
60.27、观墨机构;
61.28、称重机构;281、天平;
62.3、贴合装置;31、固定支架;32、上贴合机构;33、下贴合机构;34、预固化机构;35、定位机构;
63.4、固化装置;41、固化载台;42、固化灯;43、第二滑轨;44、第六升降模组;
64.51、第一取料机构;511、第一工件取料手指;512、第一升降模组;513、第一x轴移动模组;514、第二x轴移动模组;
65.52、第二取料机构;521、第二升降组件;522、第一旋转模组;523、第三x轴移动模组;524、第二工件取料手指;
66.53、搬运翻转机构;531、第四x轴移动模组;532、第三升降模组;533、翻转模组;534、搬运手指;
67.6、存储柜;
68.7、中转载台;
69.8、第二过渡舱;
70.9、寻边机构。
具体实施方式
71.下面详细描述本发明的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
72.在本发明的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
73.在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
74.需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。此外,术语“第一”、“第二”仅仅用于在描述上
加以区分,并没有特殊的含义。其中,术语“第一位置”和“第二位置”为两个不同的位置。
75.下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
76.如图1至图3所示,本实施例提供了一种点胶贴合固化一体机,包括工作平台1、点胶装置2、贴合装置3、固化装置4和搬运装置,点胶装置2设置在工作平台1上,用于对第一工件进行涂胶;贴合装置3设置在工作平台1上,并位于点胶装置2的一侧,贴合装置3用于将已进行涂胶处理的第一工件和第二工件贴合并进行预固化处理,第一工件和第二工件贴合并进行预固化处理后形成半成品;固化装置4设置在贴合装置3远离点胶装置2的一侧,固化装置4用于将半成品进行固化处理,半成品进行固化处理后形成成品;搬运装置用于分别取放和移动第一工件、第二工件、半成品和成品。
77.使用时,通过搬运装置抓取并移动第一工件至点胶装置2处进行涂胶处理后移动至贴合装置3处,再抓取并移动第二工件移动至贴合装置3处使第一工件和第二工件完成贴合以及预固化处理进而形成半成品,最后抓取并移动半成品至固化装置4处进行固化以形成所需的成品。与现有技术相比,该点胶贴合固化一体机将产品制造中所需的多个设备集成在一起,实现整个生产制造过程中的自动化,提高生产效率,降低生产成本。
78.本实施例中,第一工件为晶圆,第二工件为玻璃,晶圆上均匀部分有多个芯片。
79.由于将第一工件和第二工件加工形成成品的整个过程需要在密封的环境下形成,故点胶贴合固化一体机还包括罩体11,罩体11能罩设在工作平台1上,并对点胶装置2和贴合装置3罩盖住形成密封环境。
80.具体地,点胶贴合固化一体机还包括存储柜6、第一过渡舱和第二过渡舱8,存储柜6设置在固化装置4和工作平台1之间;第一过渡舱位于点胶装置2远离贴合装置3的一侧;第二过渡舱8设置在存储柜6远离固化装置4的一侧上并位于工作平台1上方,搬运装置包括第一取料机构51、第二取料机构52和搬运翻转机构53,第一取料机构51可移动地设置在工作平台1上,且位于点胶装置2远离贴合装置3的一侧,用于将第一工件从第一过渡舱中取出并转移到中转载台7上;第二取料机构52可移动地设置在固化装置4上,第二取料机构52能将第二工件从存储柜6中取出并转移到第二过渡舱8上,第二取料机构52还能将半成品从第二过渡舱8中转移都固化装置4内,第二取料机构52还能将成品从固化装置4中取出并放置到存储柜6内;搬运翻转机构53可移动地设置在工作平台1上,并位于点胶装置2和贴合装置3的前方,搬运翻转机构53能依次将第一工件从中转载台7转移到点胶装置2再转移到贴合装置3处,搬运翻转机构53还能将第二工件从第二过渡舱8中取出并翻转180度后转移到贴合装置3处,搬运翻转机构53还能将半成品从贴合装置3处取出并转移到第二过渡舱8内。
81.可以理解是,先通过第一取料机构51将从之前工序中的得到的第一工件从第一过渡舱中转移到中转载台7上,再通过搬运翻转机构53将第一工件从中转载台7上移动至点胶装置2处进行涂胶处理后再转移到贴合装置3处,另一边通过第二取料机构52将第二工件从存储柜6中取出并转移到第二过渡舱8中,再通过搬运翻转机构53将第二工件翻转180度后移动至贴合装置3处,进而使第一工件和第二工件完成贴合以及预固化处理后形成半成品,随后搬运翻转机构53抓取并移动半成品到第二过渡舱8中,最后第二取料机构52将半成品从第二过渡舱8中转移到固化装置4处进行固化以形成所需的成品并放置到存储柜6中。
82.即通过第一过渡舱和第二过渡舱8能避免生产过程中出现撞车的情况(即后一工序未完成前一工序已完成),并通过将搬运装置划分成第一取料机构51、第二取料机构52和
搬运翻转机构53以提高整个生产效率。当然,在其它实施例中,也可将采用直线电机驱动六轴机械手取代第一取料机构51和搬运机构,本实施例中不做具体限制。
83.结合图4所示,第一取料机构51包括第一工件取料手指511、第一升降模组512、第一x轴移动模组513和第二x轴移动模组514,第一x轴移动模组513设置在工作平台1上;第一升降模组512设置在第一x轴移动模组513上;第二x轴移动模组514设置在第一升降模组512上;第一工件取料手指511设置在第二x轴移动模组514上。即通过第一x轴模组带动第一工件取料手指511沿x轴方向靠近第一过渡舱进行粗定位,再利用第一升降模组512实现第一工件取料手指511和第一工件处在同一高度处,最后再通过第二x轴移动模组514沿x轴方向带动第一工件取料手指511伸入第一过渡舱中并吸附住第一工件的下表面,避免与第一工件的上表面(即贴合面)接触影响后续其与第二工件之间的贴合。其中,第一工件取料手指511、第一升降模组512、第一x轴移动模组513和第二x轴移动模组514均为机械领域的相关现有结构,在此无需赘述。
84.结合图5所示,第二取料机构52包括从下往上依次连接的第二升降组件521、第一旋转模组522、第三x轴移动模组523和第二工件取料手指524。由于升降模组设置在固化装置4和存储柜6之间,即通过旋转模组实现第二工件取料手指524在两者之间的对第二工件的取放,并通过第三x轴移动模组523沿x轴方向移动实现第二工件取料手指524在存储柜6和第二过渡舱8之间的取放。其中,第二升降组件521、第一旋转模组522、第三x轴移动模组523和第二工件取料手指524均为机械领域的相关现有结构,在此无需赘述。
85.示例性地,第二工件取料手指524由设置有真空吸孔的陶瓷制成,以保证第二工件取料手指524能吸附住第二工件的下表面,避免与第二工件的上表面(即贴合面)接触影响后续其与第一工件之间的贴合。
86.结合图6所示,搬运翻转机构53包括从下往上依次连接的第四x轴移动模组531、第三升降模组532、翻转模组533和搬运手指534,第四x轴移动模组531设置在工作平台1上。即通过第四x轴移动模组531带动搬运手指534在工作平台1上沿x轴方向移动,以靠近中转载台7、点胶装置2、贴合装置3和第二过渡舱8,考虑到贴合时需要翻转第二工件使其贴合面向下,故通过翻转模组533实现第二工件从第二过渡舱8中时的贴合面朝上变成朝下的状态。其中,第四x轴移动模组531、第三升降模组532、翻转模组533和搬运手指534均为机械领域的相关现有结构,在此无需赘述。
87.结合图7和图8所示,点胶装置2包括载台机构21、第一涂胶机构22和第二涂胶机构23,载台机构21设置在工作平台1上,载台机构21用于承载第一工件并能带动第一工件旋转和升降;第一涂胶机构22位于载台机构21的上方,用于在第一工件上涂布框胶以在第一工件上形成框胶区域;第二涂胶机构23位于载台机构21的上方,用于在第一工件的框胶区域内涂布面胶。即将第一工件放置在载台机构21上且其贴合面朝上,先通过第一涂胶机构22对第一工件进行涂布框胶,再通过第二涂胶机构23在框胶区域内涂布面胶。通过将第一涂胶机构22和第二涂胶机构23集成到一起,分别完成框胶和面胶的涂布,简化了点胶装置2的结构,使其布局紧凑,提高了点胶装置2的集成度和生产效率。
88.具体地,载台机构21包括第一滑轨211和旋转载台212,第一滑轨211沿y方向延伸,旋转载台212用于承载涂胶件并滑动设置于第一滑轨211上。旋转载台212包括主体和升降载台2122,主体能够在第一滑轨211上沿y轴方向往复滑动,主体中心开设有空腔以使升降
载台2122能沿竖直方向可伸缩地设置于空腔内。即通过主体在第一滑轨211上滑动靠近或远离搬运翻转机构53以及第一涂胶机构22和第二涂胶机构23,第一工件能吸附在升降载台2122上并通过升降载台2122调整其与第一涂胶机构22的第一喷头221和第二涂胶机构23的第二喷头231之间的距离。
89.具体地,结合图9所示,第一涂胶机构22包括相连接的第一喷头221、测高件222、第四升降模组223和第一照相定位模组224,通过第四升降模组223带动第一喷头221和测高件222能与第一工件的之间沿z轴的间距始终保持相等的距离,从而形成均匀厚度的框胶,提高了框胶的质量,第一照相定位模组224用于测量第一喷头221与第一工件沿x轴方向的间距,以保证第一喷头221能位于第一工件的正上方。需要注意的是,框胶为矩形框体,包括两条平行且沿x方向的竖边和两条平行且沿y方向的横边。
90.具体地,第一喷头221为针头,能够喷涂宽度较细的胶线。测高件222为激光测头,能够实时测量与第一工件的间距。当然,测高件222还可为红外线测高机构等,本实施例不做具体限制。
91.本实施例的第一照相定位模组224为对位ccd,具有体积小、重量轻等特点,能够精确测量第一喷头221与第一工件之间的间距,提高了第一涂胶机构22的移动精度。
92.具体地,结合图10所示,第二涂胶机构23包括相连接的第二喷头231、供墨组件232、第五升降模组233和第二照相定位模组234,通过第五升降模组233带动第二喷头231能与第一工件的之间沿z轴的间距始终保持相等的距离,从而形成均匀厚度的面胶,通过供墨组件232实现第二喷头231能利用喷墨打印方式向框胶区域内涂布面胶,使得面胶的胶层的成型质量高,第二照相定位模组234用于测量第二喷头231与第一工件沿x轴方向的间距,以保证第二喷头231能位于第一工件的正上方。
93.本实施例中,第二喷头231为打印喷头,通过喷墨打印方式向框胶区域内涂布面胶,使得面胶涂布均匀,胶层的成型质量高。本实施例的第二喷头231上具有呈阵列分布的喷胶口,胶水通过多个喷胶口均匀喷涂于框胶的内部区域。因此,喷墨打印的方式提高了涂布效率,从而提高了点胶装置2的工作效率。
94.本实施例的第二照相定位模组234为对位ccd,具有体积小、重量轻等特点,能够精确测量第二喷头231与第一工件之间的间距,提高了第二涂胶机构23的移动精度。
95.结合图8所示,点胶装置2还包括截面积检测机构24,截面积检测机构24设置在载台机构21的一侧,用于检测框胶区域的截面积,以保证框胶能够完全封闭每个芯片的显示区域。具体地,截面积检测机构24包括第一立柱241和激光检测头242,第一立柱241包括相连的竖直杆和水平杆,竖直杆设置于载台机构21的一侧,水平杆的一端与竖直杆的顶部相连,另一端延伸至载台机构21的正上方;激光检测头242安装于水平杆的末端,以便测量压合后的框胶的横截面面积。
96.本实施例中,考虑到第一喷头221和第二喷头231在长时间使用后容易出现固化的残胶,影响框胶和面胶的喷涂质量,点胶装置2还包括第一擦胶机构25和第二擦胶机构26,第一擦胶机构25位于第一涂胶机构22下方,用于擦除第一涂胶机构22的出胶位置的胶水;第二擦胶机构26位于苏第二涂胶机构23下方,用于擦除第二涂胶机构23的出胶位置的胶水。
97.结合图11所示,第一擦胶机构25包括第一立板251、第一放卷轮252、第一收卷轮
253和接胶杯254。第一立板251设置于第一涂胶机构22下方,第一放卷轮252和第一收卷轮253分别可转动地设置于立板上,且第一放卷轮252与第一收卷轮253的旋向相同。第一放卷轮252上绕设有第一清洁件,并能够进行放卷以擦除胶水。第一收卷轮253能够对第一清洁件进行收卷。接接胶杯254安装于第一立板251上,即在擦胶前,第一喷头221预喷出部分胶水以避免外部的残胶进入第一喷头221内,接胶杯254用于收集预喷出的胶水,避免胶水滴落至点胶装置2的其他位置,保证点胶装置2的整洁度。本实施例的第一清洁件可以为无尘布等常用的清洁用品,以便于缠绕于第一放卷轮252上。
98.其中,第一擦胶机构25的具体擦胶过程为:第一喷头221沿竖直方向下降,并抵接于第一清洁件上。启动第一擦胶机构25,第一放卷轮252和第一收卷轮253同向转动,第一放卷轮252开始放卷,以使第一清洁件擦拭第一喷头221,第一收卷轮253同步收卷。同时第一喷头221沿x轴方向往复移动,以增强残胶清理效果和清理效率。
99.结合图12所示,第二擦胶机构26包括第二立板261、第二放卷轮262和第二收卷轮263。第二立板261设置于第二涂胶机构23的下方。第二放卷轮262和第二收卷轮263分别可转动地设置于第二立板261上,且第二放卷轮262与第二收卷轮263的旋向相同。第二放卷轮262上绕设有第二清洁件,并能够进行放卷,以擦除胶水。第二收卷轮263能够对第二清洁件进行收卷。本实施例的第二清洁件可以为无尘布等常用的清洁用品,以便于缠绕于第二放卷轮262上。
100.其中,第二擦胶机构26的具体擦胶过程为:第二喷头231沿竖直方向下降,并抵接于第二清洁件上。启动第二擦胶机构26,第二放卷轮262和第二收卷轮263同向转动,第二放卷轮262开始放卷,以使第二清洁件擦拭第二喷头231,第二收卷轮263同步收卷。同时第二喷头231沿x轴方向往复移动,以增强残胶清理效果和清理效率。
101.其中,点胶装置2还包括观墨机构27,观墨机构27设置在第二涂胶机构23的第二喷头231下方,用于检测第二涂胶机构23的第二喷头231是否发生堵塞。通过观墨机构27能够及时发现第二喷头231中喷胶口的堵塞数量和区域,从而调整第二喷头231的喷涂参数,此处的喷涂参数包括喷涂轨迹、喷胶量等,从而保证良好的面胶质量。观墨机构27为本领域内成熟的产品,可以通过外购获得,对于其具体的结构和工作过程不再进行赘述。
102.可以理解的是,本实施例中,考虑到观墨机构27与第二擦胶机构26均需设置于第二喷头231的下方,因此,将观墨机构27相邻安装于第二立板261的一侧,使结构更加紧凑,优化了观墨机构27与第二擦胶机构26的结构布局,减少了观墨机构27与第二擦胶机构26的占地面积。
103.进一步地,结合图13所示,点胶装置2还包括称重机构28,称重机构28与第二涂胶机构23的第二喷头231连接,用于控制第二涂胶机构23的第二喷头231每次工作时的胶水量,以保证每个芯片上的面胶均匀。本实施例中称重机构28包括天平281,以便能实现对胶水的重量进行称重。由于称重机构28为本领域内成熟的产品,可以通过外购获得,对于其具体的结构和工作过程不再进行赘述。
104.本实施例中,点胶贴合固化一体机还包括寻边机构9,寻边机构9位于点胶装置2的载台机构21上方,寻边机构9能分别对第一工件和第二工件进行寻边定位,以便在第一工件进行点胶之前进行定位,提高涂胶质量,且在第二工件放置在贴合装置3前先通过搬运装置将其放置在升降载台2122上进行寻边定位,尽可能提高定位效率。此外,将寻边机构9安装
在载台机构21上方,能使结构更加紧凑,优化了整个点胶贴合固化一体机的结构布局,减少了占地面积。
105.本实施例中,寻边机构9为ccd相机,能够分别拍摄第一工件和第二工件在升降载台2122上的图像。可以理解的是,点胶装置2具有控制单元,寻边机构9将拍摄的图像传输至控制单元,控制单元通过分析图像信息得到第一工件和第二工件的位置参数,并计算出旋转载台212的旋转角度,使第一工件和第二工件均能分别处于指定位置,以分别保证第一工件和第二工件的定位精度和一致性。
106.结合图14所示,贴合装置3包括固定支架31、上贴合机构32、下贴合机构33和预固化机构34,固定支架31安装在工作平台1上;上贴合机构32安装在固定支架31上,上贴合机构32安装在固定支架31上,上贴合机构32能吸附第二工件;下贴合机构33和上贴合机构32相对设置,下贴合机构33能承载第一工件并调整第一工件的相对位置,且下贴合机构33和上贴合机构32之间的间距可调,当上贴合机构32和下贴合机构33之间间距为零时能形成密封腔体,以使第一工件和第二工件在密封腔体内贴合形成半成品;预固化机构34设置在上贴合机构32和下贴合机构33之间,用于对半成品进行预固化处理。
107.使用时,通过搬运机构使上贴合机构32吸附第二工件,下贴合机构33承载第一工件,此时第一工件和第二工件沿z轴方向相对设置,随后调整上贴合机构32和下贴合机构33之间的间距进而形成密封腔体以使第一工件和第二工件能在密封腔体内完成贴合。随后再次调整上贴合机构32和下贴合机构33之间的间距使两者分开,此时形成的半成品放置在下贴合机构33上,再通过预固化机构34对半成品进行预固化处理,以避免将半成品转移到固化装置4处时第一工件和第二工件发生相对移动的情况,进而保证最后成品的合格率。由于下贴合机构33、上贴合机构32和预固化机构34为本领域内成熟的产品,可以通过外购获得,对于其具体的结构和工作过程不再进行赘述。
108.此外,贴合装置3还包括定位机构35,定位机构35包括多个间隔设置在上贴合机构32上的定位组件,定位组件能实时获取第一工件和第二工件在密封腔体内的位置信息。即当第一工件和第二工件均位于密封腔体内且两者之间存在一定的距离,通过对密封腔体进行抽气形成真空环境,进而再通过定位机构35分别获取第一工件和第二工件的位置信息并根据需要通过下贴合机构33的对位机构调整第二工件的位置,从而使第一工件和第二工件定位准确以便完成后续两者之间的贴合。
109.此外,相较于现有技术中通过两个定位组件分别获取第一工件和第二工件的位置信息而言,通过一个定位组件分别获取第一工件和第二工件的位置信息能避免定位机构35本身存在的系统误差,进一步地保证了第一工件和第二工件之间的定位准确,提高了贴合效果。由于定位机构35为本领域内成熟的产品,可以通过外购获得,对于其具体的结构和工作过程不再进行赘述。
110.其中,定位组件包括ccd相机、相机安装座、第一移动模组和第二移动模组,相机安装座设置在上贴合机构32上并与ccd相机连接;第一移动模组与相机安装座连接,用于使ccd相机能沿x轴方向或y轴方向移动;第二移动模组与相机安装座连接,用于使ccd相机能沿z轴方向移动。即先通过ccd相机对第二工件进行拍照定位,再通过第二移动模组使ccd相机向下移动以对第一工件进行拍照定位。
111.本实施例中,定位组件的数量设置有三个,即其中两个定位组件的第一移动模组
能使ccd相机沿x轴方向移动,另外一个定位组件的第一移动模组能使ccd相机沿y轴方向移动,不仅能适应不同尺寸的第一工件和第二工件,还能保证对第一工件和第二工件的定位准确。可以理解的是,若第一工件和第二工件上自带定位点,则定位组件的数量只需两个即可。
112.本实施例中,为了使密封腔体形成真空环境,贴合装置3还包括抽气机构,抽气机构包括真空泵和真空挡板阀,用于使密封腔体产生真空环境;真空挡板阀设置在上贴合机构32上,并通过真空波纹管分别与密封腔体和真空泵连接,以便控制真空泵的开启和关闭。
113.在其它实施例中,若不考虑整个点胶贴合固化一体机的占地空间,第一涂胶机构22、第二涂胶机构23和贴合装置3的数量均为多个,以提高整个生产效率。
114.结合图15所示,固化装置4包括第二滑轨43、固化载台41、固化灯42和第六升降模组44,第二滑轨43沿x轴方向延伸,固化载台41用于承载半成品并滑动设置于第二滑轨43上;固化灯42位于固化载台41的一侧并与第六升降模组44连接,固化灯42用于对半成品照射紫外线进行固化处理以形成成品。即通过固化载台41吸附半成品并在第二滑轨43上滑动以沿x轴方向靠近固化灯42,再通过第六升降模组44移动固化灯42使其沿z轴方向靠近产品以便完成固化工序。由于第六升降模组44为本领域内成熟的产品,可以通过外购获得,对于其具体的结构和工作过程不再进行赘述。
115.整个点胶贴合固化一体机的工作流程主要包括以下过程:
116.首先通过第一取料机构51将第一工件从第一过渡舱中转移到中转载台7上,再通过搬运翻转机构53将第一工件从中转载台7上转移到升降载台2122上,通过第一滑轨211移动升降载台2122至寻边机构9下方,通过寻边机构9拍照定位对第一工件的位置进行调整,随后使第一喷头221位于第一工件的上方进行框胶涂布,再使第二喷头231位于第一工件的上方进行面胶涂布,随后再次通过第一滑轨211移动升降载台2122以便搬运翻转机构53能产品转移到下贴合机构33上。
117.再者,通过第二取料机构52将第二工件从存储盒中转移到第二过渡舱8中,再通过搬运翻转机构53将第二工件从第二过渡舱8中转移到升降载台2122上,通过第一滑轨211移动升降载台2122至寻边机构9下方,通过寻边机构9拍照定位对第二工件的位置进行调整,随后通过搬运翻转机构53将第二工件从升降载台2122中取出并翻转180度后转移到上贴合机构32中。
118.然后,下贴合机构33移动使下贴合机构33和上贴合机构32之间间距为零形成密封腔体,再对密封腔体进行抽真空以及定位组件对第一工件和第二工件的拍照定位并通过对位机构调整第二工件的位置后完成第一工件和第二工件的贴合,再移动下贴合机构33使下贴合机构33和上贴合机构32分开并通过预固化机构34对贴合后的第一工件和第二工件进行预固化处理后形成半成品,再通过搬运翻转机构53将半成品从下贴合机构33转移到第二过渡舱8中,通过第二取料机构52将半成品从第二过渡舱8转移到固化载台41上,通过第二滑轨43和第六升降模组44调整半成品和固化灯42之间的距离以完成固化工序,最后第二取料机构52将成品从固化载台41中取出并放置回存储柜6中。
119.在本说明书的描述中,参考术语“有些实施例”、“其他实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而
且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
120.以上内容仅为本发明的较佳实施例,对于本领域的普通技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1