一种触发开关以及换流断路器的制作方法
1.本实用新型涉及一种触发开关,具体是一种触发开关以及换流断路器。
背景技术:
2.传统的触发开关,内部采用的是两个触点之间点接触完成动作,例如当触发开关受外力影响的时候,动触点与静触点接触实现电连接,从而实现信号的反馈。
3.这样的触发开关结构无法完成在受同一外力持续作用下,动、静触点先进行触发,然后过一定时间后再分离的动作。
4.如cn111799752a,公开的混合开关之中,因为这种类型的开关就需要一种能够在同一方向外力作用下先进行闭合,持续一段时间后再进行断开的触发开关。
技术实现要素:
5.本实用新型的主要目的在于提供一种能在受到一持续外力作用下先进行触发然后再断开的触发开关及换流断路器。
6.为实现上述目的,本实用新型提供了一种触发开关,其中,包括转动臂、触板以及驱动臂;
7.转动臂,为导电材质,一端为与一支点转动设置的转动端,另一端为用以与触板接触的接触端;
8.触板,为导电材质,具有一段用以与接触端接触的接触区域,接触区域布置在接触端的转动轨迹内;
9.驱动臂,与转动臂相连,驱动臂受外力驱动引起转动臂转动;
10.所述接触端在转动过程中由接触区域的一端进入,由另一端移出;
11.所述接触区域用于与接触端接触的接触面积为a,接触端的接触面积为b,a大于b。
12.采用此种结构,由于转动臂为转动设置,当驱动臂受到外力时,转动臂发生旋转,接触端由一端进入到接触区域(实现了电连接),在接触区域内滑行(始终接触,保持电连接),直至离开接触区域(接触端与触片断开),可以实现在同一方向外力作用下先进行闭合,持续一段时间后再进行断开的功能。
13.其中,所述接触区域为弧形,并且弧形的圆心靠近转动臂的转动中心或与转动臂的转动中心为同一点。
14.其中,所述接触端用以与接触区域接触的面为弧面。
15.其中,还包括与转动臂或驱动臂相连的偏压件,所述偏压件用以驱动转动臂在失去外力后进行复位。
16.其中,所述偏压件为扭簧。
17.其中,还包括外壳,转动臂、触板均设置外壳中;驱动臂一端伸入外壳中,另一端延伸出外壳设置。
18.其中,所述驱动臂远离转动臂的一端为绝缘件或套设有绝缘件。
19.其中,驱动臂与转动臂为一体件。
20.其中,所述触板为静止设置的。
21.其中,触板为转动设置;还包括第二偏压件,第二偏压件触板与接触端接触过程中,第二偏压件提供偏压力使两者保持接触;接触端与触板脱离时,第二偏压件驱动触端复位。
22.其中,外壳上固定一轴,转动臂上有通孔,通孔与轴配合实现转动。
23.其中,外壳上转动设置一轴,轴上开设有一个与驱动臂和转动臂交接处形状相同的槽,驱动臂和转动臂交接处嵌进槽内。
24.为了适应驱动臂、转动臂的一体化成型,轴上开设有一个与驱动臂和转动臂交接处形状相同的槽,驱动臂和转动臂交接处嵌进槽内。
25.一种换流断路器,其包括输入端、输出端、动触头、静触头以及固态开关电路;
26.动、静触头串联在输入端以及输出端之间;
27.固态开关电路电连接在输入端与输出端之间,并且固态开关电路与动、静触头并联;其中,固态开关电路具有上述的触发开关,所述触发开关的驱动臂位于动触头的转动轨迹之中。
28.其中,所述动触头用以与驱动臂接触的部分设置有绝缘结构。
29.其中,触发开关的驱动臂设置在动触头的上方。
30.采用上述触发开关结构的此种结构,由于转动臂为转动设置,当驱动臂受到外力时,转动臂发生旋转,接触端由一端进入到接触区域(实现了电连接),在接触区域内滑行(始终接触,保持电连接),直至离开接触区域(接触端与触片断开),可以实现在同一方向外力作用下先进行闭合,持续一段时间后再进行断开的功能。
31.一种换流断路器,其包括输入端、输出端、动触头、静触头以及固态开关电路;
32.动、静触头串联在输入端以及输出端之间;
33.固态开关电路电连接在输入端与输出端之间,并且固态开关电路与动、静触头并联;其中,固态开关电路具有上述的触发开关,所述触发开关的驱动臂与动触头通过柔性部件相连。
34.一种换流断路器,其包括输入端、输出端、动触头、静触头、固态开关电路以及转轴;
35.动、静触头串联在输入端以及输出端之间;
36.固态开关电路电连接在输入端与输出端之间,并且固态开关电路与动、静触头并联;
37.所述转轴与动触头为联动设置;
38.其中,固态开关电路具有上述的触发开关,所述触发开关的驱动臂位于转轴的转动轨迹之中。
39.其中,所述触发开关的驱动臂设置在转轴的上方。
40.其中,所述转轴具有凹腔,动触头处于合闸状态,所述驱动臂伸入凹腔中;所述动触头由合闸转向分闸状态时,所述凹腔的边壁给予驱动臂外力。
41.一种换流断路器,其包括输入端、输出端、动触头、静触头、固态开关电路、转轴以及联动机构;
42.动、静触头串联在输入端以及输出端之间;
43.固态开关电路电连接在输入端与输出端之间,并且固态开关电路与动、静触头并联;
44.所述联动机构、转轴、动触头为联动设置;
45.其中,固态开关电路具有上述的触发开关,所述触发开关的驱动臂位于联动机构的运动轨迹之中。
46.其中,所述联动机构包括下连杆,下连杆与转轴通过销轴连接,所述驱动臂位于销轴的运动轨迹中。
附图说明
47.图1为本实用新型实施例1的触发开关未受外力时的结构图;
48.图2为本实用新型实施例1的触发开关受外力触发时的结构图;
49.图3为本实用新型实施例1的触发开关受外力触发后并脱离触板的结构图;
50.图4为本实用新型实施例1的触发开关增加扭簧的结构图;
51.图5为本实用新型实施例1的触发开关变形方案的结构图;
52.图6为本实用新型实施例2的换流断路器处于合闸状态的原理图;
53.图7为本实用新型实施例2的换流断路器处于触发触发开关时的原理图;
54.图8为本实用新型实施例2的换流断路器处于分闸状态的原理图;
55.图9为本实用新型实施例2中的动触头与触发开关的结构图;
56.图10为本实用新型实施例2变形方案中动触头与触发开关的结构图;
57.图11为本实用新型实施例3中的换流断路器处于分闸状态的原理图;
58.图12为本实用新型实施例3中的转轴与触发开关的结构图;
59.图13为本实用新型实施例4中的销轴与触发开关的结构图。
具体实施方式
60.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本实用新型。
61.为实现上述目的,本实用新型提供了一种触发开关,其中,包括转动臂、触板以及驱动臂;转动臂,为导电材质,一端为与一支点转动设置的转动端,另一端为用以与触板接触的接触端;触板,为导电材质,具有一段用以与接触端接触的接触区域,接触区域布置在接触端的转动轨迹内;驱动臂,与转动臂相连,驱动臂受外力驱动引起转动臂转动;所述接触端在转动过程中由接触区域的一端进入,由另一端移出;所述接触区域用于与接触端接触的接触面积为a,接触端的接触面积为b,a大于b。
62.采用此种结构,由于转动臂为转动设置,当驱动臂受到外力时,转动臂发生旋转,接触端由一端进入到接触区域(实现了电连接),在接触区域内滑行(始终接触,保持电连接),直至离开接触区域(接触端与触片断开),可以实现在同一方向外力作用下先进行闭合,持续一段时间后再进行断开的功能。
63.由于接触端运动的轨迹为圆弧形的,为了更加适应接触端在运动过程中还能保持接触,可以将接触区域设置成弧形结构,弧形结构的圆心靠近转动臂的转动中心或与转动
臂的转动中心为同一点。
64.这样的设计利于接触端与接触区域触碰的过程中更加的顺畅。
65.同样的除了将接触区域设置成弧形,还可以将接触端的面做成弧面,这样同样可以接触端与接触区域触碰的过程中更加的顺畅。
66.对于一些触发开关转动臂需要原路返回的应用场景,可以在转动臂或者驱动臂上设置偏压件,常见的偏压件为扭簧、压簧、拉簧或者弹片,这样在驱动臂失去外力的时候,可以借助偏压件的偏压力进行回归原位。
67.为了将这种触发开关可以做成模块化的结构,可以设置外壳,然后将转动臂、触板均设置在内,而驱动臂一端设置在外壳中,另一端设置在外壳外。
68.为了避免驱动臂在一些特定场合中出现导电影响接触端的情况,可以将驱动臂远离转动臂的一端做成绝缘件的形式,或者在这端上套设绝缘件,绝缘件的种类有很多,可以是塑料件、橡胶件等。
69.为了使驱动臂与转动臂能够加工的更加便利,可以将驱动臂与转动臂做成一体件,这样有利于机械加工。
70.为了便于转动臂的转动设置,可以在转动臂上成型一个通孔,套设在一个轴上完成转动设置。
71.为了适应驱动臂、转动臂的一体化成型,轴上开设有一个与驱动臂和转动臂交接处形状相同的槽,驱动臂和转动臂交接处嵌进槽内。
72.除了像上述的静止设置的触板方案以外,其实还可以采用活动设置的触板。
73.活动设置的触板具有一转动中心以及第二偏压件,触板为转动设置;还包括第二偏压件,第二偏压件触板与接触端接触过程中,第二偏压件提供偏压力使两者保持接触;接触端与触板脱离时,第二偏压件驱动触板复位。
74.这样当转动臂旋转接触触板的时候,触板在第二偏压件作用下与接触端相接触,在转动臂持续旋转的过程中,触板与接触臂接触一段时间后分开,此时第二偏压件就可以带动触板回归原位;转动臂如果采用的是相反向转动的话,其过程也是类似的,只是触板的转动方向变化了下。
75.上面主要是介绍了触发开关的一些具体结构,下面将介绍触发开关应用到断路器当中几种方式。
76.方式一,利用动触头进行驱动的:
77.一种换流断路器,包括输入端(也叫电源端)、输出端(也叫负载端)、动触头、静触头以及固态开关电路;
78.动、静触头串联在输入端以及输出端之间,这样动触头、静触头之间的闭合就可以实现电源端与负载端之间导通。
79.固态开关电路电连接在输入端与输出端之间,并且固态开关电路与动、静触头并联。
80.固态开关电路具有一个触发开关,这里的触发开关就是上述实施方案当中带有扭簧复位的触发开关。
81.触发开关的实际作用就是,当触发开关的接触端与触板接触的时候,就会反馈信号给固态开关电路,固态开关得到这个信号后它就可以进行导通或者延迟一段时间再导
通,这样流经动、静触点之间的电流就会转移到固态开关电路当中,此种换流原理属于现有技术就不再过多的赘述。
82.本方案中触发开关的驱动臂是在动触头的转动轨迹中的,也就是当动触头由合闸转向分闸时,动触头移动一段时间后会推动驱动臂运动,此时转动臂转动一定角度后接触触板,从而给予固态开关电路一个触发信号。在动触头继续转动的过程中,转动臂也会继续转动脱离触板,而后动触头还会转动最终到分闸位置,由于驱动臂一直与动触头相抵,扭簧存在蓄力。当动触头由分闸转向合闸时,扭簧的蓄力会带动驱动臂转动,驱动臂动一定角度后接触触板,从而给予固态开关电路一个触发信号。在动触头继续转动的过程中,转动臂也会继续转动脱离触板,而后再脱离动触头回归原位,动触头还会继续转动最终到合闸位置。
83.作为一种变形的方案,触发开关可以是不带扭簧的,而是通过柔性部件比如软绝缘件或者软线与驱动臂相连。
84.这种结构的运动方式会如下:
85.首先驱动臂还是在动触头的转动轨迹中的,也就是当动触头由合闸转向分闸时,动触头移动一段时间后会推动驱动臂运动,此时转动臂转动一定角度后接触触板,从而给予固态开关电路一个触发信号。在动触头继续转动的过程中,转动臂也会继续转动脱离触板,而后动触头还会转动最终到分闸位置。当动触头由分闸转向合闸时,由于柔性部件的作用动触头会拉动驱动臂转动,驱动臂动一定角度后接触触板,从而给予固态开关电路一个触发信号。在动触头继续转动的过程中,转动臂也会继续转动脱离触板,而后再脱离动触头回归原位,动触头还会继续转动最终到合闸位置。
86.方式二,利用转轴进行驱动的:
87.一种换流断路器,包括输入端(也叫电源端)、输出端(也叫负载端)、动触头、静触头、固态开关电路以及转轴;
88.动、静触头串联在输入端以及输出端之间,这样动触头、静触头之间的闭合就可以实现电源端与负载端之间导通。
89.动触头设置在转轴上,动触头与转轴之间为联动的。
90.固态开关电路电连接在输入端与输出端之间,并且固态开关电路与动、静触头并联。
91.固态开关电路具有一个触发开关,这里的触发开关就是上述实施方案当中带有扭簧复位的触发开关。
92.触发开关的实际作用就是,当触发开关的接触端与触板接触的时候,就会反馈信号给固态开关电路,固态开关得到这个信号后它就可以进行导通或者延迟一段时间再导通,这样流经动、静触点之间的电流就会转移到固态开关电路当中,此种换流原理属于现有技术就不再过多的赘述。
93.触发开关的驱动臂设置在转轴的上方,并位于转轴的转动轨迹中。
94.本方案中动触头由合闸转向分闸时,转轴移动一段时间后会推动驱动臂运动,此时转动臂转动一定角度后接触触板,从而给予固态开关电路一个触发信号。在转轴继续转动的过程中,转动臂也会继续转动脱离触板,而后转轴还会转动最终到分闸位置,由于驱动臂一直与转轴相抵,扭簧存在蓄力。当动触头由分闸转向合闸时,转轴也会做同向的运动,扭簧的蓄力会带动驱动臂转动,驱动臂动一定角度后接触触板,从而给予固态开关电路一
个触发信号。在转轴继续转动的过程中,转动臂也会继续转动脱离触板,而后再脱离动触头回归原位,转轴还会继续转动最终到合闸位置。
95.其中,所述触发开关的驱动臂设置在转轴的上方。
96.作为一种延伸的变形方案,在转轴上可以开设有凹腔,动触头处于合闸状态,驱动臂正好可以伸入凹腔中;而当动触头由合闸转向分闸状态时,凹腔的边壁给予驱动臂外力。
97.方式三,利用跟动触头相关联的联动机构进行驱动的:
98.一种换流断路器,包括输入端(也叫电源端)、输出端(也叫负载端)、动触头、静触头、固态开关电路、转轴以及联动机构;
99.动、静触头串联在输入端以及输出端之间,这样动触头、静触头之间的闭合就可以实现电源端与负载端之间导通。
100.所述联动机构、转轴、动触头为联动设置。
101.这里的联动机构包括下连杆,下连杆与转轴通过销轴连接,这种下连杆与转轴之间的连接方式属于现有技术,故不再赘述。
102.固态开关电路电连接在输入端与输出端之间,并且固态开关电路与动、静触头并联。
103.固态开关电路具有一个触发开关,这里的触发开关就是上述实施方案当中带有扭簧复位的触发开关。
104.触发开关的实际作用就是,当触发开关的接触端与触板接触的时候,就会反馈信号给固态开关电路,固态开关得到这个信号后它就可以进行导通或者延迟一段时间再导通,这样流经动、静触点之间的电流就会转移到固态开关电路当中,此种换流原理属于现有技术就不再过多的赘述。
105.本方案中触发开关的驱动臂位于销轴的运动轨迹中,也就是当动触头由合闸转向分闸时,下连杆与转轴之间连接的销轴也同时运动,销轴会带动驱动臂转动,而转动臂转动一定角度后接触触板,从而给予固态开关电路一个触发信号。在动触头继续转动的过程中,转动臂也会继续转动脱离触板,而后销轴还会继续运动最终到达到动触头分闸的位置,由于驱动臂一直与销轴相抵,扭簧存在蓄力。当动触头由分闸转向合闸时,销轴也会随之一起运动,此时扭簧的蓄力会带动驱动臂转动,驱动臂动一定角度后接触触板,从而给予固态开关电路一个触发信号。在销轴继续运动的过程中,转动臂也会继续转动脱离触板,而后再脱离销轴回归原位,销轴还会继续运动到最终到动触头处于合闸的位置。
106.下面结合三个优选实施例,对上述实施方式中涉及到内容进行说明。
107.实施例1:
108.如图1
‑
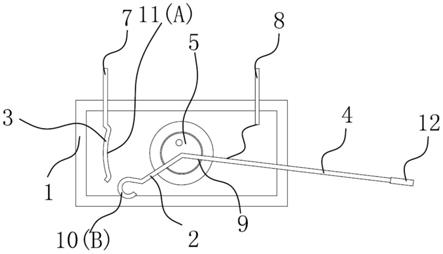
3所示,一种触发开关,包括外壳1、转动臂2、触板3、驱动臂4、轴5、第一端子7以及第二端子8。
109.第一端子7以及第二端子8设置在外壳1的表面,触板3、转动臂2以及轴5设置在外壳1的空腔内。驱动臂4的一端伸出外壳1之外,一端位于外壳1的内部。
110.第一端子7与触板3为电连接,第二端子8与转动臂2或驱动臂4为电连接。
111.轴5与外壳1之间为转动设置,轴5上开设v型的槽9,v型的槽9结构可以跟驱动臂4与转动臂2连接处相互配合,这样当驱动臂4受到外力作用的时候,轴5可以发生旋转。
112.转动臂2与驱动臂4都为导电材质,两者为一体件形成了v型的折弯。
113.转动臂2远离驱动臂4的一端为接触端10,接触端10的端部接触面为弧面。
114.触板3为导电材质的,与外壳1为固定设置,触板3朝向接触端10的一面为弧形结构,该弧形结构其实就是用来与接触端10接触的接触区域11,因此整个接触区域11都位于接触端10的转动轨迹内,并且接触区域11用于与接触端10接触的接触面积为a,接触端10的接触面积为b,a大于b。
115.这样就可以做到当接触端10受外力转动时,接触端10可以从接触区域11的一端进入,与接触区域11持续接触,直到接触端10从接触区域11的另一端移出解除接触。
116.为了避免驱动臂4在一些特定场合中出现导电影响接触端10的情况,可以将驱动臂4远离转动臂2的一端做成绝缘件的形式,例如采用塑料件12与转动臂2相卡的结构,或者在这端上套设塑料外套或橡胶外套等方式。
117.对于一些需要触发开关外力接触后需要复位的结构,还可以在上述基础上增加扭簧6的设计。
118.如图4所示,轴5外套设有扭簧6,扭簧6的一端与外壳1相连,另一端与轴5相连,这样轴5发生转动后,可以利用扭簧6可以进行复位。
119.这样的结构运动的过程如下:
120.当接触端10受外力转动时,接触端10可以从接触区域11的上端进入,与接触区域11持续接触,直到接触端10从接触区域11的下端移出解除接触,扭簧6再此过程中逐渐变形。当接触端10的外力解除时,扭簧6的复位力可以驱动接触端10反向转动,接触端10可以从接触区域11的下端进入,与接触区域11持续接触,直到接触端10从接触区域11的上端移出解除接触,直到扭簧6恢复到原形接触端10才停止运动。
121.除了实施例1中静止设置的触板3方案以外,其实还可以将其进行变形,形成活动设置的触板3方案。
122.如图5所示,活动设置的触板3方案包括触板3,触板3转动设置在外壳1中,并且触板3与外壳1之间设置有第二偏压件61,第二偏压件61也可以采用扭簧6的结构。
123.这样当转动臂2旋转接触触板3的时候,触板3在第二偏压件61作用下与接触端10相接触,在转动臂2持续旋转的过程中,触板3与接触臂接触一段时间后分开,此时第二偏压件61就可以带动触板3回归原位;转动臂2如果采用的是相反向转动的话,其过程也是类似的,只是触板3的转动方向变化了下。
124.实施例2:
125.本实施例为应用在换流断路器中的实施例,即将实施例1中的触发开关结构应用在换流断路器中。
126.如图6
‑
9所示,一种换流断路器,包括壳体、输入端13、输出端14、动触头15、静触头16、固态开关电路17以及导电件22。
127.输出端14与动触头15呈电连接状态,电连接的形式有很多,可以是软连接结构。
128.输入端13与静触头16呈电连接状态,电连接的形式有很多,可以是母排连接结构。
129.固态开关电路17,为igbt电路或igct电路。
130.固态开关电路17具有一个上述实施例1中带有扭簧6结构的触发开关((也就是轴上有扭簧的方案),触发开关的驱动臂4位于动触头15的转动轨迹之中。
131.触发开关的第一端子7以及第二端子8与固态开关电路17电连接形成回路,当触发
开关的接触端10与触板3接触时,该回路导通,固态开关电路17可以得到信号,固态开关电路17得到信号后储能并导通。此处的固态开关电路17在得到信号后是如何进行储能以及导通的属于现有技术,不再过多赘述。
132.具体的运动过程中如下:
133.当动触头15由合闸状态打向分闸状态时,动触头15运动的过程中会接触到驱动臂4,因此转动臂2会旋转,接触端10可以从接触区域11的上端进入,与接触区域11持续接触,直到接触端10从接触区域11的下端移出解除接触,扭簧再此过程中逐渐变形。
134.当动触头15由分闸状态打向合闸状态时,动触头15对驱动臂4的外力解除,由于扭簧的复位力可以驱动转动臂2反向转动,接触端10可以从接触区域11的下端进入,与接触区域11持续接触,直到接触端10从接触区域11的上端移出解除接触,动触头15继续运动直到合闸,在此过程中动触头15会完全脱离驱动臂4,扭簧6恢复到原形。
135.如图10所示,作为实施例2的变形实施例,其余结构与实施例2相同,只是触发开关采用了实施例1中无扭簧6形式的触发开关(也就是轴上无扭簧方式)
136.这种方案下,动触头15与驱动臂4之间采用的是柔性部件23相连,这里的柔性部件可以软绝缘件或者软线。
137.这样的结构具体的运动过程中如下:
138.当动触头15由合闸状态打向分闸状态时,动触头15会拉动转动臂2会旋转,接触端10可以从接触区域11的上端进入,与接触区域11持续接触,直到接触端10从接触区域11的下端移出解除接触。
139.当动触头15由分闸状态打向合闸状态时,动触头15拉动转动臂2反向转动,接触端10可以从接触区域11的下端进入,与接触区域11持续接触,直到接触端10从接触区域11的上端移出解除接触。
140.实施例3:
141.本实施例为应用在换流断路器中的实施例,即将实施例1中的触发开关结构应用在换流断路器中。
142.如图11
‑
12示,一种换流断路器,包括壳体、输入端13、输出端14、动触头15、静触头16、固态开关电路17、导电件22以及转轴18。
143.输出端14与动触头15呈电连接状态,电连接的形式有很多,可以是软连接结构。
144.输入端13与静触头16呈电连接状态,电连接的形式有很多,可以是母排连接结构。
145.固态开关电路17,为igbt电路或igct电路。
146.动触头15与转轴18为联动的,转轴18上可以开设有凹腔19。固态开关电路17具有一个上述实施例1中带有扭簧6结构的触发开关((也就是轴上有扭簧的方案)。驱动臂4正好可以伸入凹腔19中;而当动触头15由合闸转向分闸状态时,凹腔的边壁给予驱动臂4外力。
147.触发开关的第一端子7以及第二端子8与固态开关电路17电连接形成回路,当触发开关的接触端10与触板3接触时,该回路导通,固态开关电路17可以得到信号,固态开关电路17得到信号后储能并导通。此处的固态开关电路17在得到信号后是如何进行储能以及导通的属于现有技术,不再过多赘述。
148.具体的运动过程中如下:
149.当动触头15由合闸状态打向分闸状态时,转轴18也随其运动,并在运动过程中会
接触到驱动臂4,因此转动臂2会旋转,接触端10可以从接触区域11的上端进入,与接触区域11持续接触,直到接触端10从接触区域11的下端移出解除接触,扭簧6再此过程中逐渐变形。
150.当动触头15由分闸状态打向合闸状态时,转轴18反向运动,转轴18对驱动臂4的外力解除,由于扭簧的复位力可以驱动转动臂2反向转动,接触端10可以从接触区域11的下端进入,与接触区域11持续接触,直到接触端10从接触区域11的上端移出解除接触,动触头15继续运动直到合闸,在此过程中动触头15会完全脱离驱动臂4,扭簧恢复到原形。
151.实施例4:
152.本实施例为应用在换流断路器中的实施例,实施例4与实施例3的区别在于,触发开关的位置以及触发的部位不同。
153.如图13示,该断路器还具有联动机构,联动机构包括下连杆20,下连杆20与转轴18通过销轴21连接,触发开关的驱动臂4位于销轴21的运动轨迹中。
154.下连杆20与转轴18之间采用销轴21属于现有技术,当动触头15运动状态发生改变的时候,此处的销轴21也会产生位置上的变化,因此也可以用来驱动触发开关。
155.需要说明的是,本实用新型的说明书和权利要求书及上述附图中的术语“第一”、“第二”、“第三”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本实用新型的实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1