无人机模组锁定结构的制作方法
1.本实用新型涉及无人机技术领域,特别涉及无人机模组锁定结构。
背景技术:
2.大型电动力无人机产品通常自重较大,同时为了搭载不同任务载荷设备,其动力(即,电池组模等无人机模组)需要有很大的冗余设计,即,为了实现单次起降大航时大航程,需要匹配很大容量的电池组模等无人机模组。
3.单个大容量大倍率的软包锂电池,应用于大型无人机产品上成本非常高。另外,单个大容量大倍率的软包锂电池,无法小型无人机通用。因此,目前大型电动力无人机常采用,由若干小容量小倍率的软包锂电池组成的电池组模等无人机模组。
4.传统的电池组模等无人机模组,通常是通过抵持电池组模等无人机模组顶端的、可拆卸的横梁实现电池组模等无人机模组的拆卸、安装。
5.综上,现有技术至少存在以下技术问题,
6.第一,需要使用螺丝刀等工具才能够拆卸、安装电池组模等无人机模组,电池组模等无人机模组的拆卸、安装比较麻烦。对于由若干小容量小倍率的软包锂电池组成的电池组模等无人机模组,该问题显得尤为突出。
技术实现要素:
7.本实用新型的一个目的在于,解决或者缓解上述第一个技术问题。
8.本实用新型采取的手段为,无人机模组锁定结构,其包括锁定组件;锁定组件包括锁定载体、变向件、旋转件、及与锁定载体直线滑动连接的锁定件,锁定件设置有锁定体;旋转件铰接在锁定载体上且与变向件固定连接;变向件的断面设置有解锁点及、锁定点,锁定点到旋转件的旋转轴心线的距离,小于解锁点到旋转件的旋转轴心线的距离;锁定件与锁定点连接。
9.本实用新型达到的效果为,无需螺丝刀等工具即可拆卸、安装无人机模组,便于无人机模组的拆卸、安装。
10.进一步的技术方案,锁定组件还包括弹性件,弹性件分别与锁定件、锁定载体连接,使得锁定件具有靠近旋转件的旋转轴心线的趋势,锁定件与锁定点相抵。
11.能够确保锁定件较可靠地复位。
12.进一步的技术方案,锁定载体设有与锁定件相抵的限位体;变向件的断面设置有最近点,最近点到旋转件的旋转轴心线的距离、小于锁定点到旋转件的旋转轴心线的距离。
13.能够确保变向件的复位精度,能够确保锁定状态的可靠性。
14.进一步的技术方案,还包括联动组件、联动杆及、设置有旋转件的第二锁定组件,联动组件包括偏心件、及与偏心件铰接的转向件,转向件与偏心件铰接轴心线与旋转件的旋转轴心线之间设置有间距;偏心件分别与锁定组件的旋转件、第二锁定组件的旋转件固定连接,锁定组件的转向件、第二锁定组件的转向件分别与联动杆固定连接。
15.进一步的技术方案,锁定载体开设有锁定槽,锁定体插入锁定槽。
16.锁定载体能够对锁定体进行防护,防止安装无人机模组时无人机模组撞击锁定体而造成锁定体损坏。
17.进一步的技术方案,锁定槽贯穿锁定载体、安装体及调高件,被锁定凸起与锁定槽的侧壁大致贴合。
18.以减少或消除无人机模组的晃动。
19.进一步的技术方案,还包括设置有被锁定凸起的无人机模组,锁定体遮挡被锁定凸起,被锁定凸起的厚度小于等于,解锁点到旋转件的旋转轴心线的距离、锁定点到旋转件的旋转轴心线的距离之差。
20.进一步的技术方案,还包括设置有容纳槽的安装载体;无人机模组插入容纳槽。
21.进一步的技术方案,锁定载体固定设置有安装体,安装体与安装载体的底板固定连接。
22.进一步的技术方案,锁定载体包括顶端与安装体的底端可拆连接调高件,调高件的底端与安装载体的底板固定连接。
23.通过若干个调高件顶端、底端依次连接,调节锁定体的高度,能够提高锁定组件的通用性。
24.综上,本实用新型能够达到以下技术效果,
25.1}无需螺丝刀等工具即可拆卸、安装无人机模组,便于无人机模组的拆卸、安装。
26.2}能够确保变向件的复位精度,能够确保锁定状态的可靠性。
27.3}通过若干个调高件顶端、底端依次连接,调节锁定体的高度,能够提高锁定组件的通用性。
附图说明
28.图1是根据本实用新型的实施例的无人机模组锁定结构的立体示意图。
29.图2是根据本实用新型的实施例的锁定组件1、第二锁定组件2及、联动件3的立体示意图。
30.图3是根据本实用新型的实施例的锁定组件1的立体示意图。
31.图4是根据本实用新型的实施例的锁定组件1的立体分解示意图。
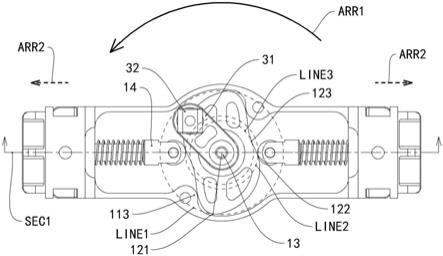
32.图5是根据本实用新型的实施例的锁定组件1的仰视示意图;箭头一arr1表示锁定组件1由锁定状态变为解锁状态时,旋转件13的旋转方向;箭头二arr2表示锁定组件1由锁定状态变为解锁状态时,锁定件14的移动方向;线条一line1表示解锁点121绕旋转件13的旋转轴心线旋转所形成的参考圆;线条二line2表示锁定点122绕旋转件13的旋转轴心线旋转所形成的参考圆;线条三line3表示最近点123绕旋转件13的旋转轴心线旋转所形成的参考圆。
33.图6是剖面一sec1的示意图。
34.图7是细节一dtl1的示意图。
35.图8是根据本实用新型的实施例的无人机模组锁定结构的俯视示意图。
36.图9是细节二dtl2的示意图;锁定组件1为锁定状态。
37.图10是细节二dtl2的示意图;锁定组件1为解锁状态。
38.箭头一arr1;箭头二arr2;剖面一sec1;细节一dtl1;细节二dtl2;线条一line1;线条二line2;线条三line3;锁定组件1;锁定载体11;安装体111;锁定槽112;限位体113;调高件119;变向件12;解锁点121;锁定点122;最近点123;旋转件13;旋转驱动件139;锁定件14;锁定体141;弹性件148;滚轮149;第二锁定组件2;联动组件3;偏心件31;转向件32;联动杆33;安装载体8;容纳槽81;无人机模组9;被锁定凸起91。
具体实施方式
39.下面将结合说明书附图,对本实用新型的具体实施方式进行说明。
40.作为具体的实施例,本实用新型的实施例的无人机模组锁定结构,其包括锁定组件1;锁定组件1包括锁定载体11、变向件12、旋转件13、及与锁定载体11直线滑动连接的锁定件14,锁定件14设置有锁定体141。
41.旋转件13铰接在(比如通过轴承等实现铰接)锁定载体11上且与变向件12固定连接;使得旋转件13能够驱动变向件12旋转。
42.作为具体的实施例,旋转件13的一端固定设置有为手柄的旋转驱动件139,通过手动旋转为手柄的旋转驱动件139,使得旋转件13具备旋转动力。作为具体的实施例,旋转件13的一端固定设置有为电机的旋转驱动件139,旋转驱动件139启动旋转,使得旋转件13具备旋转动力。
43.变向件12的断面设置有解锁点121及、锁定点122,锁定点122到旋转件13的旋转轴心线的距离,小于解锁点121到旋转件13的旋转轴心线的距离。
44.锁定件14与锁定点122连接,比如,锁定件14与锁定点122滑槽连接(比如变向件12上设置有滑槽,锁定件14的部分嵌入所述滑槽,该实施方式附图未画出)、磁吸连接、或者其他方式连接,此时锁定组件1为锁定状态。
45.作为具体得实施例,变向件12的断面上,解锁点121、锁定点122之间的连线为曲线(比如圆弧线、或者椭圆弧线等,移动速率连续变化的点所形成的线)、或者折线(多条直线的连线,移动速率存在突变的点所形成的线)。
46.本实用新型的实施例的无人机模组锁定结构,还包括设置有被锁定凸起91的无人机模组9(一般为电池模组,但不限于电池模组),锁定体141遮挡被锁定凸起91,即,拆卸无人机模组9时锁定体141位于被锁定凸起91的移动路径上而阻挡被锁定凸起91,被锁定凸起91的厚度小于等于,解锁点121到旋转件13的旋转轴心线的距离、锁定点122到旋转件13的旋转轴心线的距离之差。
47.本实用新型的实施例的无人机模组锁定结构,还包括设置有容纳槽81的安装载体8;无人机模组9插入容纳槽81。作为具体得实施例,安装载体8整体为盒状且设置有若干减重孔(附图未标出),安装载体8阵列有多个容纳槽81,比如二乘四的阵列。
48.作为具体地实施,锁定载体11固定设置有安装体111,安装体111与安装载体8的底板固定连接(通过螺丝等)。
49.作为具体地实施例,锁定载体11包括顶端与安装体111的底端可拆连接调高件119,调高件119的底端与安装载体8的底板固定连接。通过若干个调高件119顶端、底端依次连接,调节锁定体141的高度,能够提高锁定组件1的通用性。
50.工作原理为,使用前,将锁定载体11固定在无人机(附图未画出)上,一般是固定在
无人机的机舱内。作为具体的实施例,安装载体8固定在无人机上,从而使得锁定载体11固定在无人机上。
51.需要安装无人机模组9时,旋转旋转件13使得锁定件14旋转,锁定件14由与锁定点122连接变化为、与解锁点121连接,锁定件14因,锁定点122到旋转件13的旋转轴心线的距离、解锁点121到旋转件13的旋转轴心线的距离之差,而直线移动、直至让出空间而能够让出被锁定凸起91通过锁定载体11的空间(即后述的锁定槽112),此时,锁定组件1为解锁状态。然后移动无人机模组9使被锁定凸起91通过所述的空间,旋转旋转件13,使得旋转件13及锁定件14复位,此时,锁定组件1为锁定状态,锁定体141遮挡被锁定凸起91,使得无人机模组9固定在无人机上。
52.所属技术领域的技术人员容易从上述过程推导出,将无人机模组9从无人机上拆卸下的过程,为节省篇幅,对将无人机模组9从无人机上拆卸下的过程不再赘述。
53.由上述可以看出,无需螺丝刀等工具即可拆卸、安装无人机模组9,便于无人机模组9的拆卸、安装。
54.锁定组件1还包括弹性件148,弹性件148分别与锁定件14、锁定载体11连接,使得锁定件14具有靠近旋转件13的旋转轴心线的趋势,比如,弹性件148为套设在锁定件14上的弹簧,弹性件148的两端分别与锁定载体11、锁定件14相抵;锁定件14与锁定点122相抵。能够确保锁定件14较可靠地复位。作为具体的实施例,锁定件14的铰接有滚轮149,滚轮149与锁定点122相抵,以确保锁定件14能够沿变向件12滑动。
55.锁定载体11设有与锁定件14相抵的限位体113;变向件12的断面设置有最近点123,最近点123到旋转件13的旋转轴心线的距离、小于锁定点122到旋转件13的旋转轴心线的距离。弹性件148提供的弹力,使得锁定件14与锁定点122相抵,并具有与最近点123相抵的趋势,从而使得变向件12具有与限位体113相抵的趋势,能够确保变向件12的复位精度,锁定体141也相应地具有复位的趋势,能够确保锁定状态的可靠性。
56.本实用新型的实施例的无人机模组锁定结构,还包括联动组件3、联动杆33及、设置有旋转件13的第二锁定组件2,联动组件3包括偏心件31、及与偏心件31铰接的转向件32,转向件32与偏心件31铰接轴心线与旋转件13的旋转轴心线之间设置有间距;偏心件31分别与锁定组件1的旋转件13、第二锁定组件2的旋转件13固定连接,锁定组件1的转向件32、第二锁定组件2的转向件32分别与联动杆33固定连接(比如通过螺丝顶紧实现固定连接)。第二锁定组件2与锁定组件1相比缺少旋转驱动件139。作为具体地实施例,第二锁定组件2为两个以上,第二锁定组件2对应不同的无人机模组9的被锁定凸起91(同一个无人机模组9的不同面的被锁定凸起91,或者不同的无人机模组9的被锁定凸起91)。锁定组件1的旋转件13旋转,即可带动全部的第二锁定组件2旋转,能够方便、快捷地拆卸、安装多个无人机模组9。
57.锁定载体11开设有锁定槽112,锁定体141插入锁定槽112。锁定载体11能够对锁定体141进行防护,防止安装无人机模组9时无人机模组9撞击锁定体141而造成锁定体141损坏。
58.锁定槽112贯穿锁定载体11、安装体111及调高件119,被锁定凸起91与锁定槽112的侧壁大致贴合。以减少或消除无人机模组9的晃动。
59.如在本实用新型中使用用语:第一、第二等,不表示任何顺序、量或重要性,仅是用于区分。
60.如在本实用新型中使用用语:一个、一种等,不表示数量的限制,而是表示至少一个提到的对象的存在。
61.如在本实用新型中使用指示方位或位置的用语:顶部、底部、侧部、纵向、横向、中间、中心、外、内、水平、竖直、左、右、上方、下方等,意指反映相对位置,而非绝对位置。
62.如在本实用新型中使用的用语:大致、整体、近似、相近等,是为了指出存在特征但允许一定偏差的限定用语。允许一定偏差的量可取决于特定背景而变化;例如,针对尺寸的偏差、可取决于的特定背景包括但不限于尺寸公差的国家标准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1