一种基于hakbach阵列分布的高性能永磁吸附装置的制作方法
1.本实用新型属于爬壁机器人吸附装置技术领域,尤其涉及一种基于hakbach阵列分布的高性能永磁吸附装置。
背景技术:
2.随着全球化的不断发展,在国内许多生产领域需要用到磁铁,小至一个挂钩的固定,大到船舶、冶金、矿山、机械行业中钢铁等导磁性材料的吊运,磁铁都发挥着极其重要的作用。磁吸附装置结构同样应用到爬壁机器人领域,其作为行走机构的核心部分,为爬壁机器人正常爬行提供吸附力保证。目前国内爬壁机器人存在负载能力不足和稳定性较差等问题,而且对于磁吸附单元的研究较少。为了产生较大的吸附力必然要求增加磁吸附结构的体积和质量,这影响爬壁机器人运动的灵活性,增大了驱动系统的负载。
3.鉴于此,特提出本实用新型。
技术实现要素:
4.针对现有技术中存在的问题,本实用新型的目的是提供一种基于hakbach阵列分布的高性能永磁吸附装置,结构简单,设计合理,通过多块永磁铁块拼接利用,磁极引导磁路导向,提高永磁铁块的利用率,以兼顾爬壁机器人的可靠吸附和灵活运动,使永磁吸附单元在一定体积范围内提供更大的吸附力。
5.为了实现上述目的,本实用新型提供的一种基于hakbach阵列分布的高性能永磁吸附装置,包括永磁吸附单元,所述永磁吸附单元包括自上至下顺次异极相接的连接片、纯铁座和永磁组件,所述连接片与爬壁机器人固定连接,所述永磁组件为由若干永磁铁块沿周向依次拼接组成的圆弧状结构,所述永磁铁块的磁极分布方式采用海尔贝克阵列式排布,所述纯铁座上表面具有与连接片的底部形状相匹配的圆弧面,所述纯铁座下表面具有与永磁组件的顶部形状相匹配的圆弧面。
6.优选地,所述永磁铁块采用高性能的钕铁硼磁铁;
7.优选地,所述永磁铁块的截面呈扇形;
8.优选地,所述永磁铁块的数量为七块;
9.优选地,所述永磁铁块的外表面具有包覆层,所述包覆层为铁皮;
10.优选地,所述纯铁座的材质为纯铁。
11.本实用新型提供的一种基于hakbach阵列分布的高性能永磁吸附装置,具有如下有益效果:
12.现有技术存在的问题是:增大吸附力就必须要求增加磁吸附结构的体积和质量,影响爬壁机器人运动的灵活性,增大了驱动系统的负载。本实用新型有效避免了这个技术问题。本实用新型提供的一种基于hakbach阵列分布的高性能永磁吸附装置整体形状呈圆弧形,连接片为两片相对设置于纯铁座的上表面,连接片上具有若干通孔,可以根据爬壁机器人尺寸以及需要被吸附的位置,调整永磁吸附单元与爬壁机器人固定的位置,适用于不
同尺寸的爬壁机器人,使用范围广。
13.同时,永磁铁块沿周向依次拼接组成的圆弧状结构的永磁组件,永磁铁块的磁极分布方式采用海尔贝克阵列式排布,磁极引导磁路导向,提高永磁铁块的利用率,以兼顾爬壁机器人的可靠吸附和灵活运动,使磁吸附单元在一定体积范围内提供更大的吸附力。
附图说明
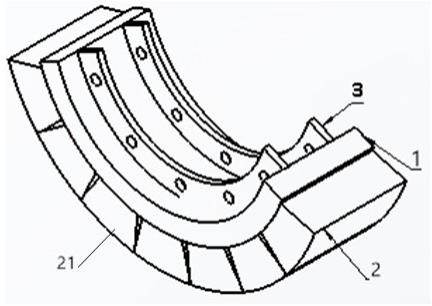
14.图1为本实用新型提供的一种基于hakbach阵列分布的高性能永磁吸附装置的结构示意图。
15.图2为图1的主视图。
16.图3为图1的侧视图。
17.图4为图1的俯视图
18.图中:
19.1.纯铁座
ꢀꢀ
2.永磁组件
ꢀꢀ
21.永磁铁块
ꢀꢀ
3.连接片。
具体实施方式
20.下面结合具体实施例和附图对本实用新型做进一步说明,以助于理解本实用新型的内容。
21.如图1
‑
4所示,为本实用新型提供的一种基于hakbach阵列分布的高性能永磁吸附装置,包括永磁吸附单元,永磁吸附单元包括自上至下顺次异极相接的连接片3、纯铁座1和永磁组件2,连接片3用于将永磁吸附单元与爬壁机器人固定连接,纯铁座1用于磁路的引导,永磁组件2为由若干永磁铁块21沿周向依次拼接组成的圆弧状结构,永磁铁块21的数量优选为七块,永磁铁块21的磁极分布方式采用海尔贝克阵列式排布,永磁铁块21的外表面具有包覆层,包覆层为铁皮。纯铁座1上表面具有与连接片3的底部形状相匹配的圆弧面,纯铁座1下表面具有与永磁组件2的顶部形状相匹配的圆弧面,永磁铁块21的截面呈扇形且均匀分布在纯铁座1下表面,永磁铁块21采用高性能的钕铁硼磁铁,纯铁座1的材质为纯铁,极大程度提高磁铁的性能,大大减少磁的损失。永磁吸附单元的尺寸可以根据不同车轮或者是不同移动机构来进行调整。
22.现有技术存在的问题是:增大吸附力就必须要求增加磁吸附结构的体积和质量,影响爬壁机器人运动的灵活性,增大了驱动系统的负载。本实用新型有效避免了这个技术问题。本实用新型提供的一种基于hakbach阵列分布的高性能永磁吸附装置整体形状呈圆弧形,连接片3为两片,相对设置于纯铁座1的上表面,连接片3上具有若干通孔,可以根据爬壁机器人尺寸以及需要被吸附的位置,调整永磁吸附单元与爬壁机器人相对的位置,适用于不同尺寸的爬壁机器人,使用范围广。同时,永磁铁块21沿周向依次拼接组成的圆弧状结构的永磁组件2,永磁铁块21的磁极分布方式采用海尔贝克阵列式排布,磁极引导磁路导向,提高永磁铁块21的利用率,以兼顾爬壁机器人的可靠吸附和灵活运动,使磁吸附单元在一定体积范围内提供更大的吸附力。
23.本文中应用了具体个例对实用新型构思进行了详细阐述,以上实施例的说明只是用于帮助理解本实用新型的核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离该实用新型构思的前提下,所做的任何显而易见的修改、等同替换或其他改进,均应
包含在本实用新型的保护范围之内。
技术特征:
1.一种基于hakbach阵列分布的高性能永磁吸附装置,其特征在于,包括永磁吸附单元,所述永磁吸附单元包括自上至下顺次异极相接的连接片、纯铁座和永磁组件,所述连接片与爬壁机器人固定连接,所述永磁组件为由若干永磁铁块沿周向依次拼接组成的圆弧状结构,所述永磁铁块的磁极分布方式采用海尔贝克阵列式排布,所述纯铁座上表面具有与连接片的底部形状相匹配的圆弧面,所述纯铁座下表面具有与永磁组件的顶部形状相匹配的圆弧面。2.根据权利要求1所述的一种基于hakbach阵列分布的高性能永磁吸附装置,其特征在于,所述永磁铁块采用高性能的钕铁硼磁铁。3.根据权利要求2所述的一种基于hakbach阵列分布的高性能永磁吸附装置,其特征在于,所述永磁铁块的截面呈扇形。4.根据权利要求3所述的一种基于hakbach阵列分布的高性能永磁吸附装置,其特征在于,所述永磁铁块的数量为七块。5.根据权利要求4所述的一种基于hakbach阵列分布的高性能永磁吸附装置,其特征在于,所述永磁铁块的外表面具有包覆层,所述包覆层为铁皮。6.根据权利要求1所述的一种基于hakbach阵列分布的高性能永磁吸附装置,其特征在于,所述纯铁座的材质为纯铁。
技术总结
本实用新型公开了一种基于hakbach阵列分布的高性能永磁吸附装置,包括永磁吸附单元,永磁吸附单元包括自上至下顺次异极相接的连接片、纯铁座和永磁组件,连接片与爬壁机器人固定连接,永磁组件为由若干永磁铁块沿周向依次拼接组成的圆弧状结构,永磁铁块的磁极分布方式采用海尔贝克阵列式排布,纯铁座上表面具有与连接片的底部形状相匹配的圆弧面,纯铁座下表面具有与永磁组件的顶部形状相匹配的圆弧面;永磁铁块采用高性能的钕铁硼磁铁,纯铁座的材质为纯铁;本实用新型结构简单,设计合理,多块永磁铁块拼接利用,磁极引导磁路导向,提高永磁铁块的利用率,以兼顾爬壁机器人的可靠吸附和灵活运动,使永磁吸附单元在一定体积范围内提供更大的吸附力。范围内提供更大的吸附力。范围内提供更大的吸附力。
技术研发人员:杨磊 霍立强 王岳飞
受保护的技术使用者:彼合彼方机器人(天津)有限公司
技术研发日:2021.04.26
技术公布日:2021/12/11
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1