半导体装置的制造装置以及半导体装置的制造方法与流程
1.本说明书中公开了一种包括对共同的基板的互不相同的位置实施规定处理的多个处理头的半导体装置的制造装置以及半导体装置的制造方法。
背景技术:
2.一般而言,半导体的制造装置包括对基板进行规定的处理例如膏糊(paste)的涂布或芯片的接合等的处理头。在执行规定的处理时,要求相对于基板来准确地定位处理头。为了可实现此种定位,以往已知有下述技术:在处理头设置拍摄基板的摄像机,基于由所述摄像机所获得的图像来掌握处理头相对于基板的位置(例如专利文献1等)。
3.现有技术文献
4.专利文献
5.专利文献1:日本专利第4029855号
技术实现要素:
6.发明所要解决的问题
7.此外,近年来,为了缩短前置时间(lead time),也提出了多个处理头针对一个基板来并行地执行规定处理的制造装置。根据此制造装置,能够比单独头的情况大幅缩短针对一个基板的处理时间。在此种多头结构的情况下,各处理头具有定位用的摄像机,基于由摄像机所获得的图像来进行定位。
8.此处,在摄像机中,因透镜或拍摄元件的个体差异或摄像机的光轴的倾斜等,所获得的像会产生变形。因此,即使在从相同的位置拍摄相同的区域的情况下,根据摄像机,所获得的图像也会产生差异。并且,由于此种对应于每个摄像机而不同的像的变形,在处理头间产生定位的偏差。其结果,载置于一个基板的处理对象物(膏糊或芯片等)的排列变得不均等,导致半导体装置的品质下降。
9.因此,本说明书中,公开了一种能够进一步提高半导体装置的品质的半导体装置的制造装置以及半导体装置的制造方法。
10.解决问题的技术手段
11.本说明书中公开的半导体装置的制造装置的特征在于包括:多个处理头,为了对共同的基板的互不相同的位置实施规定的处理而彼此隔开地设置,且所述多个处理头分别具有拍摄所述基板的摄像机;以及控制器,控制所述多个处理头的驱动以及所述基板的搬送,且所述控制器将所述多个处理头分别相对于所述基板而定位在至少抵消光学偏移的位置,所述控制器在所述定位之前,先利用所述多个处理头各自的摄像机来拍摄包含参照物和与所述参照物隔开地设置的对象物的一个光学检查部位,以获取与所述多个处理头分别对应的光学检查图像,并算出映照于所述光学检查图像中的所述参照物与所述对象物的相对位置关系在所述处理头间的差异量来作为所述光学偏移。
12.此时,也可为,所述规定的处理包含将所述对象物载置于所述基板的处理,所述参
照物是所述基板的表面的形状特征,所述控制器在所述光学检查图像的获取之前,先使所述多个处理头中的一个对所述基板的一部分执行所述规定的处理,将所述基板中的、通过所述规定的处理而载置了所述对象物的部位作为所述光学检查部位,而利用所述多个处理头各自的摄像机来进行拍摄。
13.而且,也可为,所述控制器在所述定位中,将所述多个处理头分别定位在抵消所述光学偏移以及机械偏移的位置,所述控制器在所述定位之前,先使所述多个处理头分别对所述基板的对应的区域执行所述规定的处理,利用所述多个处理头各自的摄像机来拍摄所述基板的对应的区域,以获取与所述多个处理头分别对应的机械检查图像,基于映照于所述机械检查图像中的所述参照物与所述对象物的相对位置关系,关于所述多个处理头分别算出所述机械偏移。
14.而且,也可为,所述规定的处理是对所述基板涂布膏糊作为所述对象物的处理。
15.本说明书中公开的半导体装置的制造方法的特征在于包括下述步骤:获取与为了对共同的基板的互不相同的位置实施规定的处理而彼此隔开地设置的多个处理头分别对应的光学偏移;以及将所述多个处理头分别相对于所述基板而定位在至少抵消光学偏移的位置,由所述多个处理头分别对所述基板的对应的位置执行所述规定的处理,所述获取的步骤包括下述步骤:利用所述多个处理头各自中所设的摄像机来拍摄包含参照物和与所述参照物隔开地设置的对象物的一个光学检查部位,以获取与所述多个处理头分别对应的光学检查图像;以及算出映照于所述光学检查图像中的所述参照物与所述对象物的相对位置关系在所述处理头间的差异量来作为所述光学偏移。
16.发明的效果
17.根据本说明书中公开的技术,获取光学偏移,并将处理头定位在抵消所述光学偏移的位置,因此处理对象物在基板内的位置偏差得以降低。作为结果,能够进一步提高半导体装置的品质。
附图说明
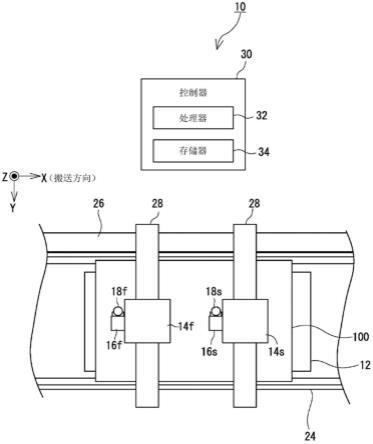
18.图1是表示制造装置的结构的图。
19.图2是制造装置的概略侧面图。
20.图3是表示膏糊的涂布处理已完成的引线框架的样子的映象图。
21.图4是表示由摄像机所获得的拍摄图像的一例的图。
22.图5a是表示拍摄格子花纹的示例的图。
23.图5b是表示拍摄格子花纹的另一例的图。
24.图6是表示未修正光学偏移而涂布膏糊时所获得的涂布结果的一例的图。
25.图7是表示光学偏移的计算处理流程的映象图。
26.图8是表示光学偏移的计算处理流程的映象图。
27.图9a是第一光学检查图像的映象图。
28.图9b是第一光学检查图像的映象图。
29.图10是表示位置修正值的计算流程的流程图。
具体实施方式
30.以下,参照附图来说明半导体装置的制造装置10。图1是表示制造装置10的结构的图。而且,图2是制造装置10的概略侧面图。所述制造装置10被用于在作为基板的引线框架100上安装半导体芯片以制造半导体装置。更具体而言,制造装置10是在引线框架100上涂布用于固定半导体芯片的膏糊的膏糊涂布装置。
31.制造装置10包括:吸附固定引线框架100的载台12、第一处理头14f及第二处理头14s、沿x方向搬送引线框架100的搬送轨道24、以及控制它们的驱动的控制器30。此处,第一处理头14f及第二处理头14s的结构大致相同。因此,以下的说明中,在不区分第一处理头14f以及第二处理头14s的情况下,省略尾标f、s而简称作“处理头14”。关于后述的分注器16以及摄像机18也同样。
32.如图1所示,第一处理头14f及第二处理头14s是沿x方向(即,引线框架100的搬送方向)隔开间隔而配置。各处理头14能够通过x引导件26以及y引导件28而沿x方向以及y方向自由移动。另外,第一处理头14f以及第二处理头14s能够彼此独立地移动。
33.处理头14具有分注器16与摄像机18。分注器16将芯片固定用的膏糊p例如非导电性膏糊(non-conductive paste,ncp)等喷出至引线框架100。分注器16能够通过未图示的升降机构而沿z方向升降。分注器16只要能够根据需要来喷出指定量的膏糊p,则其结构并无特别限定。因此,分注器16例如也可具有:贮存膏糊p的注射器(syringe)、可在注射器内进退的活塞、以及使活塞直进移动的马达。
34.摄像机18相对于分注器16而在x方向以及y方向上隔开地配置,且相对于分注器16的水平方向的相对位置被固定。另外,以下,将摄像机18相对于分注器16的偏移的设计值(xs,ys)称作“基本偏移oss”。
35.摄像机18具有铅垂朝下的光轴,对引线框架100进行拍摄。若进行具体说明,则在引线框架100上,呈二维矩阵状地设定有多个用于涂布膏糊的区域即岛部。摄像机18拍摄所述岛部。摄像机18将岛部(即引线框架100)的拍摄图像发送至控制器30。控制器30基于拍摄图像来运算处理头14与引线框架100的相对位置关系,并基于所述运算结果来进行处理头14的定位。
36.控制器30控制载台12或搬送轨道24、处理头14的驱动。而且,控制器30还算出用于修正处理头14的目标位置的位置修正值,关于此将后述。另外,所述控制器30是在物理上具有处理器32与存储器34的计算机。
37.接下来,参照图3来说明借助此种制造装置10所进行的、膏糊的涂布处理。图3是表示膏糊的涂布处理已完成的引线框架100的样子的映象图。如图3所示,本例的制造装置10将一个引线框架100沿搬送方向一分为二来进行管理。即,控制器30将引线框架100分为位于搬送方向上游侧的第一区域af与较第一区域af位于搬送方向下游侧的第二区域as来进行管理。
38.以下,将设于所述第一区域af的岛部称作“岛部if”,将设于第二区域as的岛部称作“岛部is”。同样,将涂布于岛部if的膏糊称作“膏糊pf”,将涂布于岛部is的膏糊称作“膏糊ps”。而且,在不区分区域的情况下,省略尾标f、s而简称作“区域a”、“岛部i”、“膏糊p”。
39.第一处理头14f对引线框架100中的第一区域af的岛部is涂布膏糊pf。同样,第二处理头14s对引线框架100中的第二区域as的岛部is涂布膏糊ps。这样,针对一个引线框架
100,利用两个处理头14f、14s来并行地实施处理,由此,能够大幅降低前置时间。
40.在涂布膏糊p时,控制器30利用摄像机18来拍摄岛部i,基于所获得的拍摄图像来算出分注器16与岛部i的相对位置关系。并且,控制器30对处理头14进行定位,以使分注器16位于目标位置。若定位完成,则控制器30驱动分注器16来对岛部i喷出规定量的膏糊p。控制器30对所有的岛部i执行此种处理。
41.如上所述,在涂布膏糊p时,必须对处理头14进行定位。对所述处理头14的定位处理进行说明。如上所述,在对处理头14进行定位时,控制器30利用摄像机18来拍摄引线框架100(具体而言为岛部i)。图4是表示利用摄像机18而获得的拍摄图像的一例的图。
42.如图4所示,在拍摄图像中,映照有大致矩形的岛部i。所述岛部i被利用作为表示定位基准的参照物。本例中,将所述岛部i的中心点(以下称作“岛部中心点ci”)设为涂布膏糊p的目标位置。
43.控制器30为了对分注器16进行定位,而基于拍摄图像来确定分注器16与岛部中心点ci的相对位置。具体而言,控制器30基于拍摄图像来求出岛部中心点ci相对于拍摄图像的原点og的偏移(x1,y1)。所述偏移(x1,y1)表示摄像机18的光轴相对于岛部中心点ci的偏移。并且,只要将所述偏移(x1,y1)加上分注器16相对于摄像机18的偏移即基本偏移oss=(xa,ya),便能够确定分注器16相对于岛部中心点ci的偏移的理论值。
44.其中,基本偏移oss是摄像机18相对于分注器16的偏移的设计值。因此,摄像机18相对于分注器16的实际偏移因组装误差或经年变化而与基本偏移oss不同的情况多。以下,将实际偏移与基本偏移oss的误差量称作机械偏移osm=(xm,ym)。而且,由于每个摄像机18的光学特性的差异,在第一处理头14f与第二处理头14s之间存在后述的光学偏移oso。因此,控制器30在处理头14的定位之前,先求出机械偏移osm以及光学偏移oso。并且,在对处理头14进行定位时,将抵消这些偏移osm、oso的位置设定为处理头14的目标位置。
45.此处,机械偏移osm能够使用以往知晓的方法来确定。例如也可在基于基本偏移oss来对处理头14进行定位并涂布了膏糊p后,对涂布有所述膏糊p的岛部i进行拍摄,并基于所述拍摄图像来求出膏糊p从岛部中心点ci计起的偏离量,根据所述偏离量来求出机械偏移osm。
46.接下来,参照图5来说明光学偏移oso。即便是相同的制品,摄像机18的光学特性也会产生差异。光学特性的差异例如是由于透镜的个体差异或拍摄元件的个体差异、摄像机18的组装时产生的光轴的倾斜的差异等而产生。由于存在此种光学特性的偏差,即便是从相同的位置拍摄相同的对象物,根据摄像机,所获得的像的内容也有时会产生差异。例如考虑从特定的位置利用多个摄像机来拍摄特定的格子花纹的情况。此时,存在下述情况:在一个摄像机中,如图5a所示,得到中心部呈线轴状收缩的像,而在其他摄像机中,如图5b所示,得到中心部呈桶状鼓起的像。若不考虑此种像的差异而基于拍摄图像来进行定位,则会在摄像机间产生定位误差。例如,格子的交点c1在拍摄图像内的坐标位置在图5a中为(x,y),而在图5b中为(x+xo,y+yo)。因此种摄像机的光学特性的偏差引起的位置偏离量(xo,yo)为光学偏移oso。若不考虑所述光学偏移oso,则尽管在现实中为相同的位置,但会作为不同的位置而算出,从而导致定位误差。
47.此处,此种光学偏移oso是摄像机18间的位置偏离量,因此在处理头14为单个的情况下,即,在只存在一个定位用的摄像机18的情况下,不会造成大的问题。另一方面,在设有
多个处理头14,利用所述多个处理头14来对一个引线框架100实施处理的情况下,光学偏移oso会造成定位的偏差,从而造成大的问题。
48.图6是表示在第一摄像机18f以及第二摄像机18s中未修正光学偏移oso时获得的涂布结果的一例的图。图6中,在对第一区域af涂布膏糊pf时,第一分注器16f基于由第一摄像机18f所拍摄的图像来进行定位。因此,若限定于第一区域af,则无光学特性的偏差,因此涂布于第一区域af的多个膏糊pf的相对位置关系成为接近理想的状态。同样,涂布于第二区域as的多个膏糊ps的相对位置关系也成为接近理想的状态。另一方面,因第一摄像机18f与第二摄像机18s的光学特性的偏差,膏糊pf与膏糊ps的相对位置关系产生与光学偏移oso相应的误差。例如,尽管要求多个膏糊沿x方向排列成一直线状,但在图6的示例中,膏糊ps相对于膏糊pf而偏离了yo。同样,在要求多个膏糊沿x方向以固定间隔而涂布的情况下,在第一区域af与第二区域as之间,其x方向的间隔也相对于理想的距离而偏离xo。并且,作为结果,在以引线框架100整体来看的情况下,膏糊p的涂布位置产生偏差,从而导致最终制造的半导体装置的品质下降。
49.因此,本例中,在实际开始制品的制造之前,还求出光学偏移oso。以下,对所述光学偏移oso的获取进行说明。图7、图8是表示光学偏移oso的计算处理流程的映象图。在求出光学偏移oso的情况下,控制器30如图7所示,指示第一处理头14f向一个岛部if涂布膏糊。所述一个岛部if成为利用第一摄像机18f以及第二摄像机18s这两者来拍摄的光学检查部位。在第一处理头14f对一个岛部if涂布了膏糊pf的情况下,控制器30使第一摄像机18f拍摄所涂布的膏糊pf。控制器30获取通过所述拍摄而获得的图像来作为第一光学检查图像40f。图9a是第一光学检查图像40f的映象图。图9a中,黑圆表示岛部中心点ci,
×
表示膏糊pf的中心点(以下称作“膏糊中心点cp”)。如图9a的示例所示,在第一光学检查图像40f中,第一摄像机18f获得了膏糊中心点cp相对于岛部中心点ci而偏离了(a,b)的像。
50.接下来,控制器30如图8所示,使引线框架100沿x方向移动,以使作为光学检查部位的岛部if位于第二摄像机18s的视野内。并且,使第二摄像机18s拍摄光学检查部位,获取所获得的图像来作为第二光学检查图像40s。所述第二光学检查图像40s拍摄的是与第一光学检查图像40f相同的膏糊pf。图9b是表示第二光学检查图像40s的一例的图。另外,图9b中,虚线的
×
表示距岛部中心点ci为(a,b)的位置,即,基于第一光学检查图像40f而算出的膏糊中心点cp的位置。
51.如图9b所示,第二光学检查图像40s中,膏糊pf相对于岛部中心点ci而偏离了(c,d)。即,尽管拍摄的是相同的膏糊pf,但图像内的膏糊中心点cp相对于岛部中心点ci的偏离量,甚而膏糊pf相对于参照物(本例的情况下为岛部if)的相对位置却不同。这是由于第一摄像机18f与第二摄像机18s的光学特性的差异所引起。图9的示例中,因光学特性的差异,第二摄像机18s与第一摄像机18f相比,偏离了(e,f)。另外,e=c-a且f=b-d。
52.控制器30获取此种由第一摄像机18f求出的膏糊位置与由第二摄像机18s求出的膏糊位置的差值(e,f)来作为光学偏移oso=(xo,yo)。即,设为xo=e且yo=f并存储至存储器34中。并且,将抵消所述光学偏移oso的值(-xo,-yo)作为第二处理头14s的位置修正值而存储至存储器34中。在对第二处理头14s进行定位时,将第二处理头14s的目标位置加上抵消光学偏移oso的值(-xo,-yo)。由此,在第一处理头14f与第二处理头14s中,定位基准一致,涂布于一个引线框架100的膏糊p的相对位置关系接近理想值。
53.接下来,参照图10来说明算出第一处理头14f以及第二处理头14s各自的位置修正值cvf、cvs的流程。图10是表示位置修正值cvf、cvs的计算流程的流程图。在算出位置修正值cvf、cvs时,首先,利用第一处理头14f来对第一区域af涂布膏糊pf,利用第二处理头14s来对第二区域as涂布膏糊ps(s10)。另外,膏糊pf、ps既可涂布于对应的区域af、as的所有的岛部if、is,也可仅涂布于一部分的岛部if、is。
54.接下来,获取第一、第二机械检查图像(s12)。第一机械检查图像是利用第一摄像机18f来拍摄岛部if的膏糊pf而获得的图像。同样,第二机械检查图像是利用第二摄像机18s来拍摄岛部is的膏糊ps而获得的图像。
55.控制器30基于所获得的第一机械检查图像来算出第一处理头14f的机械偏移,即,第一机械偏移osm_f。而且,控制器30基于所获得的第二机械检查图像来算出第二处理头14s的机械偏移,即,第二机械偏移osm_s(s14)。
56.接下来,控制器30获取利用第一摄像机18f来拍摄岛部if的膏糊pf所得的第一光学检查图像40f(s16)。所述第一光学检查图像40f既可重新拍摄而获取,也可获取第一机械检查图像的一个来作为第一光学检查图像40f。
57.继而,控制器30使引线框架100移动,以使映照于第一光学检查图像40f中的膏糊pf位于第二摄像机18s的视野内(s18)。然后,利用第二摄像机18s来拍摄膏糊pf,获取第二光学检查图像40s(s20)。
58.控制器30只要能够获取第一光学检查图像40f、第二光学检查图像40s,便可获取光学偏移oso(s22)。即,获取基于第一光学检查图像40f而获得的参照物与膏糊pf的相对位置关系、与基于第二光学检查图像40s而获得的参照物与膏糊pf的相对位置关系的差值,来作为光学偏移oso。
59.接下来,控制器30算出抵消所获得的偏移的值来作为位置修正值(s24)。即,控制器30算出抵消第一机械偏移osm_f的值来作为第一位置修正值cvf=-(osm_f)。而且,控制器30算出抵消第二机械偏移osm_s及光学偏移oso的值来作为第二位置修正值cvs=-(osm_s+oso)。在制造制品时,将各处理头14定位至将目标位置加上位置修正值所得的位置。
60.根据以上的说明可明确的是,根据本例,利用多个摄像机18f、18s来拍摄共同的对象物(膏糊pf),基于所获得的图像间的对象物的视觉差异来求出光学偏移oso。并且,在制品制造时,将处理头14s定位至抵消所述光学偏移oso的位置,由此,能够降低处理头14间的位置偏差,从而能够提高最终获得的制品的品质。
61.另外,所述的说明中,作为规定的处理,举涂布膏糊p的装置为例进行了说明,但只要是利用多个头来对一个基板实施处理的装置,则在本说明书中公开的技术也可适用于其他装置。例如,本说明书的技术也可适用于将芯片接合至基板的接合装置。即,在接合装置中,有具有多个接合头且利用所述多个接合头来将芯片接合至共同的基板的接合装置。本说明书的技术也可适用于此接合装置。
62.而且,所述的说明中,将引线框架100的岛部i作为参照物,将涂布于岛部i的膏糊pf作为对象物,来获取两者的相对位置关系、甚而光学偏移oso。但是,只要是利用两个摄像机18f、18s来拍摄相同的物体,则拍摄对象也可为膏糊pf以外。例如也可在载台12的附近预先设置检查测点(station),在所述检查测点预先设置作为基准的参照物和某些对象物。此时,控制器30将所述检查测点作为光学检查部位而使两个摄像机18f、18s进行拍摄。而且,
所述的说明中,设有两个处理头14,但只要是对共同的一个基板实施处理,则处理头14的个数也可为两个以上。
63.而且,所述的说明中,将第一摄像机18f、第二摄像机18s相对于搬送方向予以固定,在利用第一摄像机来拍摄了岛部is后,搬送引线框架100而利用第二摄像机来拍摄同一岛部。但是,也可使第一摄像机18f、第二摄像机18s在保持两者之间的偏移的状态下相对于引线框架100而移动。
64.符号的说明
65.10:制造装置
66.12:载台
67.14f:第一处理头
68.14s:第二处理头
69.16f:第一分注器
70.16s:第二分注器
71.18f:第一摄像机
72.18s:第二摄像机
73.24:搬送轨道
74.26:x引导件
75.28:y引导件
76.30:控制器
77.32:处理器
78.34:存储器
79.40f:第一光学检查图像
80.40s:第二光学检查图像
81.100:引线框架
82.af:第一区域
83.as:第二区域
84.ci:岛部中心点
85.cp:膏糊中心点
86.if、is:岛部
87.osm:机械偏移
88.oso:光学偏移
89.og:原点
90.pf、ps:膏糊。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1