接合装置、接合方法以及接合程序与流程
本发明涉及一种接合装置、接合方法以及接合程序。
背景技术:
1、迄今为止的打线接合机中,利用照相机对作业区域自正上方进行拍摄而确认其位置,使照相机退避,使接合工具移动至所述作业区域的正上方后进行接合处理。由于如此般照相机与接合工具的配置存在偏移(off-set),因而也有时利用正确测定其相对位置的技术(例如参照专利文献1)。
2、现有技术文献
3、专利文献
4、专利文献1:国际公开第2016/158588号
技术实现思路
1、发明所要解决的问题
2、在循序(sequential)执行位置确认及接合处理的情形时,不仅需要时间,而且有时在位置确认与接合处理之间,所测量的位置因热的影响等而发生偏移。另外,若在与头部分立的结构体安装摄像单元,则产生测量误差的要因增大。另一方面,若将之前的摄像单元配设于头部的工具旁,则因其视野狭窄而难以观察作业区域。
3、本发明是为了解决此种问题而成,提供一种接合装置等,可实现作业区域相对于头部的、精确的三维坐标测量,并且缩短自作业区域的三维坐标测量至执行接合处理为止的前置时间(lead time)。
4、解决问题的技术手段
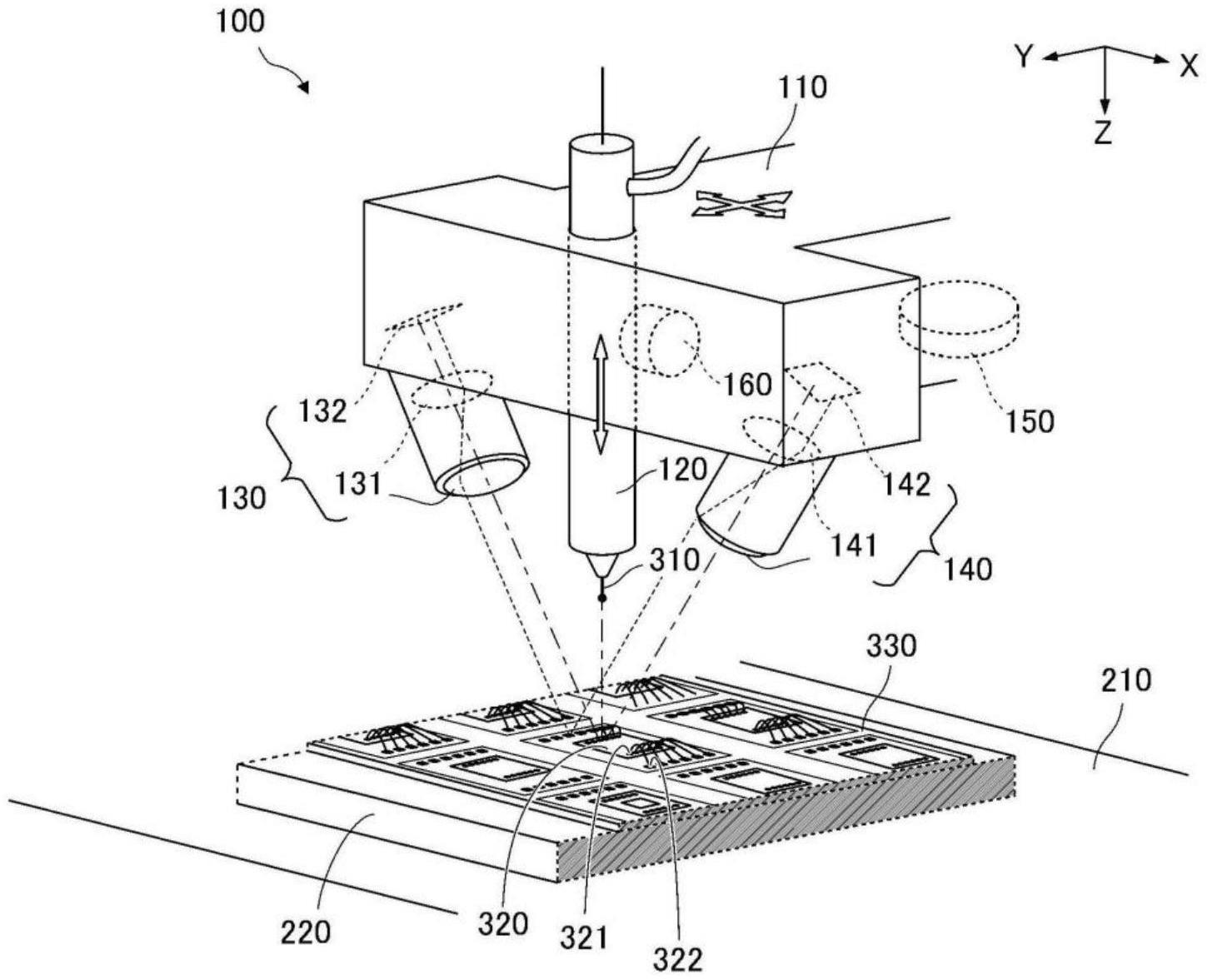
5、本发明的第一实施例的接合装置包括:接合工具,向载置于平台的基板的接合点供给接合线;第一摄像单元及第二摄像单元,配置为各自的光学系统及摄像元件以平行于平台的平台面的平面成为焦点面的方式满足沙姆(scheimpflug)条件;计算部,基于第一摄像单元输出的第一图像中所拍摄到的作为接合点中接下来要供给接合线的目标点的像的第一像、以及第二摄像单元输出的第二图像中所拍摄到的作为目标点的像的第二像,算出目标点的三维坐标;驱动控制部,基于计算部所算出的目标点的三维坐标使接合工具接近目标点。
6、本发明的第二实施例的接合方法具有:摄像工序,使第一摄像单元及第二摄像单元分别拍摄载置于平台的基板的接合点中接下来要供给接合线的目标点,所述第一摄像单元及第二摄像单元配置为各自的光学系统及摄像元件以平行于平台的平台面的平面成为焦点面的方式满足沙姆条件;计算工序,基于第一摄像单元输出的第一图像中所拍摄到的作为目标点的像的第一像、及第二摄像单元输出的第二图像中所拍摄到的作为目标点的像的第二像,算出目标点的三维坐标;以及驱动工序,基于目标点的三维坐标使供给接合线的接合工具接近目标点。
7、本发明的第三实施例的接合程序使计算机执行:摄像工序,使第一摄像单元及第二摄像单元分别拍摄载置于平台的基板的接合点中接下来要供给接合线的目标点,所述第一摄像单元及第二摄像单元配置为各自的光学系统及摄像元件以平行于平台的平台面的平面成为焦点面的方式满足沙姆条件;计算工序,基于第一摄像单元输出的第一图像中所拍摄到的作为目标点的像的第一像、及第二摄像单元输出的第二图像中所拍摄到的作为目标点的像的第二像,算出目标点的三维坐标;以及驱动工序,基于目标点的三维坐标使供给接合线的接合工具接近目标点。
8、发明的效果
9、根据本发明,可提供一种接合装置等,可实现作业区域相对于头部的、精确的三维坐标测量,并且缩短自作业区域的三维坐标测量至执行接合处理为止的前置时间。
技术特征:
1.一种接合装置,包括:
2.根据权利要求1所述的接合装置,其中所述计算部基于所述第一图像中所拍摄到的作为所述接合点中后续要供给所述接合线的后续点的像的第三像、及所述第二图像中所拍摄到的作为所述后续点的像的第四像,算出所述后续点的三维坐标,
3.根据权利要求1或2所述的接合装置,包括:评价部,基于所述第一摄像单元及所述第二摄像单元中的至少任一个输出的图像来评价接合工序合适与否,
4.根据权利要求3所述的接合装置,其中所述评价部评价前端像,所述前端像为与所述接合点接触之前的所述接合线的前端部的像。
5.根据权利要求3或4所述的接合装置,其中所述评价部评价固着像,所述固着像为固着所述接合线之后的所述接合点的像。
6.一种接合方法,具有:
7.一种接合程序,使计算机执行:
技术总结
接合装置包括:接合工具,向载置于平台的基板的接合点供给接合线;第一摄像单元及第二摄像单元,配置为各自的光学系统及摄像元件以平行于平台的平台面的平面成为焦点面的方式满足沙姆条件;计算部,基于第一摄像单元输出的第一图像中所拍摄到的作为接合点中接下来要供给接合线的目标点的像的第一像、及第二摄像单元输出的第二图像中所拍摄到的作为目标点的像的第二像,算出目标点的三维坐标;以及驱动控制部,基于计算部所算出的目标点的三维坐标使接合工具接近目标点。
技术研发人员:瀬山耕平
受保护的技术使用者:株式会社新川
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!