半导体元件的制造设备、半导体基材的检测方法及系统与流程
1.本揭露实施方式是有关于一种半导体元件的制造设备、半导体基材的检测方法及半导体基材检测系统。
背景技术:
2.在半导体制程中所使用的液体施加设备中,实时监测和/或观察晶圆上的施加液体是控制液体施加制程的均匀性的关键因素之一。随着半导体产业已经发展到纳米制程,为了追求更高的元件密度、更高的性能和更低的成本,需要更精确地实时监控晶圆和/或喷嘴上施加的液体的状态。
技术实现要素:
3.在一实施方式中,提供一种半导体元件的制造设备,其包含配置以支撑基材的旋转座以及喷嘴臂。喷嘴臂包含喷嘴及光监测装置,光监测装置包含激光发射器以及多个光感测器的阵列排列在喷嘴臂中且朝向旋转座。
4.在一实施方式中,提供一种半导体基材检测系统。系统包含基材支架以及耦接于基材支架的回馈控制器。基材支架包含配置以支撑基材的旋转座以及喷嘴以及排列在喷嘴臂中且面向基材的多个光监测装置的喷嘴臂。光监测装置配置以朝向基材发射激光脉冲,其中激光脉冲照射在基材上,且接着接收来自基材的反射的激光脉冲。光监测装置配置以识别接收激光脉冲的光感测器的一或多个光感测器。光监测装置配置以透过使用一反射光强度分析来自基材的光监测装置的信号,来确定基材的制程品质。
5.在一实施方式中,提供一种半导体基材的检测方法。方法包含放置基材在旋转座上。将喷嘴臂定位在基材上,其中喷嘴臂包括一个或多个激光发射器以及排列在喷嘴臂中且面向基材的多个光感测器的阵列。随后,使用一个或多个的激光发射器向基材发射激光光线,其中激光光线照射在基材上。然后,在光感测器的阵列接收来自于基材反射的激光光线。识别接收激光光线的光感测器的阵列中的一或多个光感测器。透过一光监测装置分析从基材反射的光感测器的阵列的信号。随后,确定基材的制程品质是否在可接受的范围内。当基材的制程品质不在可接受范围内时,自动调整半导体制造制程的可配置参数,以将制程品质设定在可接受范围内。
附图说明
6.从以下结合所附附图所做的详细描述,可对本揭露的态样有更佳的了解。需注意的是,根据业界的标准实务,各特征并未依比例绘示。事实上,为了使讨论更为清楚,各特征的尺寸都可任意地增加或减少。
7.图1是根据本揭露的一实施方式的化学制程设备的示意图;
8.图2是绘示光线经过全反射的示意图;
9.图3是根据本揭露的一些实施方式的用于监测与检查施加在晶圆上的液体的装置
示意图;
10.图4a、图4b、图4c与图4d是根据本揭露的一些实施方式的用于监测与检查施加在晶圆上的液体的装置示意图;
11.图5a与图5b是根据本揭露的一些实施方式的用于监测与检查施加在晶圆上的液体的装置示意图;
12.图6a与图6b是根据本揭露的一些实施方式的用于监测与检查施加在晶圆上的液体的装置示意图;
13.图7a与图7b是根据本揭露的一些实施方式的用于监测与检查施加在晶圆上的液体的装置示意图;
14.图8示出了根据本揭露的一些实施方式的用于控制制程的回馈控制系统的示意图;
15.图9示出了根据本揭露的一实施方式的监测与检查施加在晶圆上的液体的方法流程图;以及
16.图10a与图10b是绘示根据本揭露的一些实施方式的控制器。
17.【符号说明】
18.1,2,3,4,5,6,7,8,9,10,11,12,13,14,15:感测器
19.800:基材
20.802:上表面
21.808:径向点
22.809:第二径向点
23.820:旋转座
24.900:喷嘴臂
25.904:喷嘴的中心
26.906:滴落位置
27.910:喷嘴
28.1000:光监测系统
29.1059:流体元件控制器
30.1100:光源
31.1110:激光光线发射器
32.1111:入射角
33.1112:激光光线,激光脉冲
34.1114:激光光线,激光脉冲
35.1116:反射光,第一反射光
36.1117:散射光
37.1120:激光发射器
38.1200:光侦测器
39.1210:光感测器
40.1220:阵列
41.1301:第一化学流体
42.1302:第二化学液体
43.1304:显影剂液滴
44.1306:光阻剂,化学液体
45.1308:清洗液
46.1400:回馈控制系统
47.1410:控制器
48.2000:计算机系统
49.2001:计算机
50.2002:键盘
51.2003:鼠标
52.2004:显示器
53.2005:光盘驱动器
54.2006:磁盘驱动器
55.2011:微处理单元
56.2012:只读记忆体
57.2013:随机存取记忆体
58.2014:硬盘
59.2015:总线
60.2021:光盘
61.2022:磁盘
62.s1010,s1020,s1030,s1040:步骤
63.s1050,s1060,s1070:步骤
64.a,b,c,d,l1:方向
具体实施方式
65.应当理解的是,以下的揭露提供了许多不同实施方式或实施例,以实施所提供的标的的不同特征。以下所描述的构件与安排的特定实施例是用以简化本揭露的实施例。当然这些仅为实施例,并非用以作为限制。举例而言,元件的尺寸不限于所揭露的范围或值,而是可取决于制程条件和/或装置的期望性质。而且,于描述中,第一特征形成于第二特征之上或上方,可能包含第一特征与第二特征以直接接触的方式形成的实施方式,亦可能包含额外特征可能形成在第一特征与第二特征之间的实施方式,如此第一特征与第二特征可能不会直接接触。为了简单和清楚的目的,可以不同的比例任意绘制各特征。
66.此外,空间相对关系的用语,例如:“在
…
之下(beneath)”、“在
…
下面(below)”、“较低(lower)”、“在
…
上面(above)”、“较高(upper)”、或之类的用语,可在此使用以简明描述如附图所绘示的一元件或特征与另一(另一些)元件或特征的关系的叙述。空间关系的用语,除了附图所描绘的定向之外,亦用以包含元件在使用或操作中的不同的定向。元件可另外定向(旋转90度或其他定向),且在此使用的空间关系叙述可同样地照此解释。此外,用语“由
…
制成(made of)”可意指“包含(comprising)”或“由
…
组成(consisting of)”。
67.在半导体制造操作中,各种湿式制程中会使用,例如水或各种化学品(酸、碱、溶剂
等)等液体。举例而言,微影制程使用光阻涂布操作与光阻显影操作。其他湿式制程包含湿式清洗操作与湿式蚀刻操作。在这些湿式制程中,当晶圆旋转时,液体从喷嘴被施加在晶圆上。控制从喷嘴施加液体的一些关键因素包含监控喷嘴的液滴泄漏以及监控晶圆上的液体行为。尽管可以通过使用成像装置(例如感光耦合元件或高速摄影机)来直观地监测液体行为,但仍需要一种更可靠且更精确的液体行为监测方法。在本揭露实施方式中,采用激光源与安装在喷嘴上的侦测器阵列,利用全内反射的工作原理来实时监测喷嘴状态以及晶圆上的液体运动/动力学。
68.图1示出了包含喷嘴臂900及旋转座820的湿式制程设备的横截面示意图。旋转座820是由支撑机构所支撑,并提供基材800放置于其上。在一些实施方式中,基材800的外围靠在连接到旋转座820的支撑元件上。在一些实施方式中,喷嘴臂900配置以通过沿着方向l1移动喷嘴的中心904来改变位置,以在基材800上的滴落位置906上施加液体。
69.图2是绘示光线经过全内反射的示意图。从光源发出的光线通过透明介质(液体)传播,当光束以大于“临界角”的入射角遇到与具有较低折射率(refractive index,ri)的另一种介质的界面时,会产生全内反射。临界角θc以下列方程式表示:
70.θc=sin-1
(n2/n1)
–
方程式(1);
71.其中n2为其他介质(例如空气)的折射率,且n1为光线所通过的介质(例如液体)的折射率。
72.如图2所示,如果光线在液体(例如水,折射率1.33)中传播至接近与空气(折射率1)的界面时,如果界面处的入射角大于θc=sin-1
(1/1.33)≈48.6
°
,将发生全内反射回到水中。当液体完全覆盖晶圆时,内反射光不会从液体表面出射,而是可能从晶圆的边缘部分射出。当液体部分覆盖晶圆时,内反射光则从液体的端部射出。晶圆上所施加的液体随着时间的推移而扩展,光出射的位置也会随着时间的推移而变化。通过由侦测器检测出射光,可以监测或观察晶圆上的液体的状态或行为。
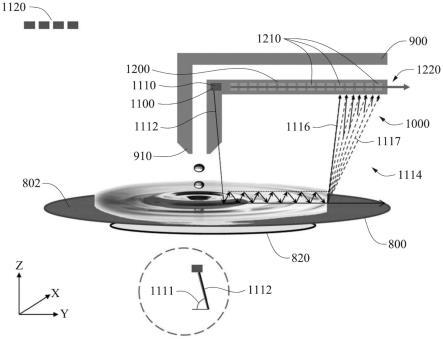
73.图3是根据本揭露的一些实施例的包括喷嘴910和光监测系统1000的喷嘴臂900的示意图。光监测系统1000包含光源1100及光侦测器1200。根据本揭露的一些实施例,光监测系统1000包含使用例如激光的光感测与量测装置,以提供制程品质的定量和线上记录。在一些实施方式中,光源1100包含激光光线发射器1110,例如半导体激光装置。在一些实施方式中,可使用数个激光光线发射器1110。在一些实施方式中,光侦测器包含多个光感测器1210的阵列1220,例如半导体光侦测器。在一些实施方式中,光感测器1210是线性排列(线感测器),且在其他实施方式中,光感测器1210是二维排列。特别地,当光源1100包括多个沿x方向排列的激光源时,多个侦测器是以x-y矩阵排列。
74.激光光线发射器1110配置以朝向基材800发射激光光线1112。在一些实施方式中,激光光线发射器1110配置以连续波形式或以脉冲形式向基材800发射激光光线1112。激光光线发射器1110是排列在喷嘴臂中,例如,设置在喷嘴臂的下表面上并朝向旋转座820上的基材800。在一些实施方式中,激光光线发射器1110配置以调整激光发射器朝向基材的激光光线1112的入射角1111,以选择一个或多个接收反射的激光光线的光感测器。在一些实施方式中,光源1100包括多个激光发射器1120,且连续地或依所需顺序发射激光脉冲。在其他实施方式中,激光光线发射器同时或接近同时发射激光脉冲。多个激光光线发射器1120和激光光线发射器1110的排列方式不限于图3所示的排列方式。激光光线发射器1120以任何
所需的配置方式设置在下表面。在一些实施方式中,光源1100设置在喷嘴或喷嘴臂以外的位置,例如环绕旋转座820的腔室或杯体的内壁上。
75.光感测器1210的阵列1220配置以接收反射的激光光线1114,包括来自基材800的反射光1116及散射光1117,并产生信号。阵列1220设置在喷嘴臂中,例如,设置在喷嘴臂面对旋转座820上的基材800的下表面上。光感测器1210间隔设置在喷嘴臂900中的阵列中。在一些实施方式中,光感测器1210设置在喷嘴或喷嘴臂以外的位置,例如,环绕旋转座820的腔室或杯体的内壁、或独立的支撑件上。
76.根据本揭露的一些实施方式的光监测系统1000透过分析光感测器的阵列所接收到的从基材反射光的信号,来确定基材的制程品质。在一些实施方式中,每一个光感测器1210根据接收到的反射光强度来产生并输出信号(例如“0”表示未接收到光;或“1”表示接收到光)。根据光感测器1210所识别的信号,来识别例如制程化学溶液的存在、制程化学溶液扩展的直径、或是制程化学溶液的干燥度等制程品质。在一些实施方式中,光感测器1210的阵列1220还包含带通滤波器,其在工作时,使预定波长范围内的光通过,例如,波长大于或等于650nm,且小于或等于950nm。在一些实施方式中,与光感测器1210的阵列1220相连的运算电路,在操作上,产生并输出指示制程品质(例如,制程化学溶液的存在、制程化学溶液的直径、或是制程化学溶液的干燥程度)是否位于与由光信号表示的侦测光中所包括的每个像素相对应的位置处的讯息。
77.实施例1:化学控制。
78.在一些实施方式中,如图4a、图4b、图4c与图4d所示,光源包含激光光线发射器1110以及具有光感测器1210的阵列1220的光侦测器。
79.在一些实施方式中,光监测系统1000配置以监测与控制化学制程。例如图4a所示,激光光线发射器1110朝向基材800的上表面802发射激光光线1112。在旋转座不动时,基材800被放置在旋转座820上。接着,喷嘴臂分配在第一化学液体1301,且晶圆被旋转。在其他实施方式中,在晶圆旋转的同时,从喷嘴分配第一化学液体。当第一化学液体部分地覆盖晶圆,一个或多个光感测器,例如阵列1220中一个或多个光感测器,例如感测器1至感测器8,不接收从基材800的反射的激光光线1114,而感测器9接收反射的激光光线。施加在晶圆上的第一化学流体1301随着时间的推移而扩展,内反射光出射的位置随着时间的推移而改变。举例而言,当第一化学液体1301延伸至晶圆的径向点808时,如图2所示,内反射光从晶圆的径向点808处的第一化学液体1301的端部射出,且阵列1220的一个或多个光感测器,例如阵列1220中感测器9,接收来自基材800的反射的激光光线1114(第一反射光1116)。如图3所示,感测器10至感测器15可接收散射光1117,并根据反射光强度产生信号。
80.通过基材800旋转所产生的离心力,第一化学液体1301在基材800的上表面802上扩展。当基材的上表面完全被第一化学液体1301覆盖时,阵列1220的光感测器,例如感测器1至感测器15均无接收到来自基材800反射的激光光线。再次参照图2,内反射光从第一化学液体1301的端部(位于晶圆外侧)射出,光感测器均未接收到来自基材800的反射的激光光线1114(第一反射光)或二次反射光。
81.接着,如图4c所示,甩干操作被完成以从基材800的上表面移除第一化学液体后,阵列的光感测器,感测器1至感测器8开始接收来自基材的反射的激光射线1114。感测器9至感测器15几乎没有检测到或接收到的来自基材的反射的激光光线1114。由于晶圆上没有施
加化学液体,因此没有内部反射光。激光光线发射器1110所射出的激光光线1112从基材800反射,且阵列1220的一个或多个光感测器,例如感测器2,接收来自基材800的反射的激光光线1114(第一反射光)。如图3所示,感测器3至感测器8可以接收二次反射光,并根据反射光强度产生信号。在一些实施方式中,激光光线发射器1110调整激光发射器的入射激光光线1112朝向基材的角度,使所有光感测器、感测器1至感测器15接收到来自基材的反射的激光光线1114。
82.当光感测器,例如感测器2与其他感测器,识别出基材800的上表面没有第一化学液体时,如图4d所示,第二化学液体1302从喷嘴臂900中分配出。与图4a与图4b类似,光感测器依序接收反射光,直到第二化学液体完全覆盖晶圆。施加在晶圆上的第二化学液体1302随着时间的推移而扩散,内反射光出射的位置随着时间的推移而改变。举例而言,当第二化学液体1302到达晶圆的第二径向点809时,如图2所示,内反射光从晶圆的第二径向点809处的第二化学流体1302的端部射出,且阵列1220中的一个或多个光感测器,例如感测器9,接收来自基材的反射的激光光线1114(第一反射光)。如图3所示,感测器10至感测器15可接收二次散射光并根据反射光强度产生信号。在一些实施方式中,根据第二化学液体的折射率,调整光源的入射角,以产生全反射。
83.实施例2:液滴泄漏。
84.在一些实施方式中,如图5a与图5b所示,光监测系统1000配置以监控液滴作为液体的泄漏。如图5a所示,激光光线发射器1110朝向基材800的上表面802发射激光光线1112。基材800被放置在旋转座上。旋转座可在转动或不动。阵列1220的所有的光感测器,例如感测器1至感测器15,接收到来自基材800的反射的激光光线1114。在一些实施方式中,当结束施加液体时,或甩干操作结束时,喷嘴臂移动到晶圆外(如图5b中的箭头a)。在光阻剂泄漏或显影剂液滴1304从图5a所示的喷嘴滴落下的情况下,显影剂液滴1304径向向外扩散,且覆盖在基材800的上表面802上。当没有液体在晶圆上时,例如感测器3至感测器11接收反射与散射光。
85.如图5b所示,当光监测系统1000被配置为缩回喷嘴臂900沿着方向“a”移动喷嘴的中心904远离滴落位置906,一些感测器,例如,不同于感测器3至感测器11,接收由泄漏液滴所导致的反射光。根据液体的扩散量,阵列的光感测器,如感测器1至感测器5不接收来自基材的反射的激光脉冲,而阵列的光感测器,如感测器6至感测器13接收来自基材的反射的激光脉冲。因此,光监测系统1000可确认喷嘴是否有液体泄漏。在一些实施方式中,光监测系统1000在确定喷嘴存在液体泄漏时进一步确认泄漏源。
86.实施例3:液体残留物。
87.在一些实施方式中,如图6a与图6b所示,光监测系统1000配置以监控液体的残留物,例如光阻剂。如图6a所示,激光光线发射器1110朝向基材800的上表面802发射激光光线1112。基材800被放置在旋转座820上,且旋转座820沿着方向“b”旋转以进行甩干操作。由于被施加的化学液体1306,阵列1220的光感测器,例如感测器1至感测器15均无接收到来自基材800反射的激光光线1114。通过基材800旋转产生的离心力,被施加的化学液体1306覆盖在基材800的上表面802上。
88.如图6b所示,当甩干操作完成后仍有液体残留物,而阵列的光感测器(例如感测器3至感测器7)因为被施加的化学液体1306的残留物而没有接收到来自基材的反射的激光光
线1114,而阵列的光感测器(例如感测器1、感测器2、感测器8至感测器13)接收反射的激光光线1114。当没有残留物时,类似于图4c,感测器1至感测器8接收反射和散射光。因此,光监测系统1000可侦测是否有液体残留物在基材800上,例如光阻剂1306。
89.实施例4:清洗制程优化。
90.在一些实施方式中,如图7a与图7b所示,光监测系统1000配置以优化湿式制程中的清洗制程。如图7a所示,激光光线发射器1110朝向基材800的上表面802发射激光光线1112。基材800被放置在旋转座820上,且旋转座沿着方向“c”旋转以进行清洗操作。因在喷洒的清洗液1308中发生全内反射,阵列1220的光感测器(例如感测器1至感测器15)均未接收到来自基材800的反射的激光脉冲。透过基材800旋转产生的离心力,使清洗液1308覆盖在基材800的上表面802上。
91.如图7b所示,光监测系统1000配置以维持基材800的旋转,使喷嘴臂900沿着方向“d”移动,使喷嘴的中心904远离基材800的中心。因基材800的运动所产生的流体波纹910,使阵列的感测器9至感测器15没有接收到来自基材的反射的激光光线1114,而阵列的感测器1至感测器8接收来自基材的反射的激光光线1114。光监测系统1000更配置以记录和使用阵列1220的光感测器1210接收到的反射的激光光线的信息。据此,光监测系统1000决定清洗基材800的最佳路径。
92.光监测系统1000朝向基材800发射激光脉冲1112。以下将描述单个脉冲序列,但应理解的是,在一些实施例中会应用多个激光脉冲。光监测系统1000发射单一的激光脉冲1112,接收来自基材800的反射的激光脉冲1114,并在发射下一个激光脉冲前计算出往返时间(turnaround time,tat)和距离。在一例子中,这可以透过增加两个连续脉冲之间的重复率或透过在发射单个激光脉冲后使光监测系统1000停止产生脉冲来实现。然而,在其他实施方式中,光监测系统1000可以发出一系列脉冲,并根据基材800反射的一系列脉冲进行测量。
93.激光脉冲1112撞击(照射)于基材800的上表面802,并反射(反射的激光脉冲1114)回光监测系统1000的光侦测器1200。光监测系统1000计算接收到反射的激光脉冲1114所使用的时间。这个时间,也称为往返时间(tat),是透过测量由光监测系统1000发射激光脉冲1112的时间点到光监测系统1000接收反射的激光脉冲1114的时间点的期间所计算的。在其他实施方式中,光监测系统1000在激光脉冲1112射出时传送第一信号(指令)至外部控制器(例如图10a及图10b的计算机系统2000),并在接收到反射的激光脉冲1114时发出第二信号。当接收到第一信号时,控制器启动定时器,当接收到第二信号时,控制器停止定时器。从而使用定时器获得往返时间。应该注意的是,反射的激光脉冲1114和激光脉冲1112的激光脉冲实质上是相同的。提供不同的标号是为了解释,并区分发射的(传输的)激光脉冲和反射的激光脉冲。
94.在一些实施方式中,光监测系统1000根据各别计算出的往返时间,计算出光监测系统1000与基材800的对应距离。光监测系统1000中包含从往返时间计算距离的逻辑(软件或硬件),且光监测系统1000将计算出的距离提供给控制器,以指示(例如在图10a的显示器2004显示)操作者。在其他实施方式中,控制器1410包含从往返时间计算距离的逻辑(软件或硬件)。在这种情况下,光监测系统1000将往返时间发送给控制器1410,且控制器1410提供计算的距离给操作者。
95.根据光监测系统1000测量的距离,可以确定制程品质的方向。也就是说,可以确定旋转座820是否以恒定速度旋转基材800,从而保持制程膜厚度的均匀性。或者,若判断旋转座820并非以恒定速度旋转基材800,可表示制程膜厚度可能不均匀。
96.在一些实施方式中,光监测系统1000也(透过软件或硬件电路)被编程或以其他方式配置成实现超时条件,其中光监测系统1000等待一定时间以接收反射的激光脉冲1114。若在时间内没有接收到反射的激光脉冲1114(即超过时间限制),则宣布超时并通知操作员(例如在图10a的显示器2004上显示)。超时可能表示基材800严重倾斜,而使得反射的激光脉冲1114没有反射回发射它的光监测系统1000。这可能表示机器喷嘴臂出现故障,无法按预期处理基材。操作员可以对机器喷嘴臂执行必要的补救措施。或者,它可能指示其他设备故障或其他错误,并执行必要的补救措施。
97.如图8所示,在一些实施方式中,提供回馈控制系统1400,来根据阵列1220的光感测器1210所产生的制程品质变化(例如,液体施加制程的均匀性或制程膜厚度的均匀性)来控制化学制程品质。在一些实施方式中,分析制程品质以监控制程品质的变化。在一些实施方式中,制程品质的变化是由控制器1410基于阵列1220的光感测器1210对制程品质的分析来确定。在一些实施方式中,当阵列1220的光感测器1210侦测到制程品质的变化时,回馈控制系统1400的控制器1410基于阵列1220的光感测器1210所量测到的制程品质的值和/或制程品质的变化来执行制程。
98.在一些实施方式中,流体元件控制器1059位于与喷嘴臂900和旋转座820相邻的位置。流体元件控制器1059控制多个流体元件,例如控制阀、泵浦和压缩机。在一些实施例中,来自流体元件控制器1059的信号作为用于后续制程调整的回馈。在一些实施方式中,回馈可与致动器连接以控制其中一个流体元件。
99.一些实施方式所提供的回馈控制系统还基于后续的品质分析信息发送通知,指出品质分析在可接受的品质分析范围内。在一些实施方式中,通知包含制程化学流体供应和分配之间的频谱差。在一些实施方式中,基于产生的通知,回馈进一步将通知发送到与流体元件控制器1059相关联的第一外部设备以及与下一个制程工具相关联的第二外部设备。
100.图9出了根据本揭露实施方式的表面缺陷和制程品质的检测方法的流程图。方法包含,在步骤s1010中,将基材放置在旋转座上。在步骤s1020中,将喷嘴臂定位在基材上方。喷嘴臂包含一个或多个激光发射器以及光感测器的阵列排列在喷嘴臂中且朝向基材。接着,在步骤s1030中,使用一个或多个激光发射器中的每一个向基材发射激光脉冲,其中激光脉冲是照射在基材上。在步骤s1040中,在光感测器的阵列接收从基材反射的激光脉冲。因此,在步骤s1050中,识别接收到激光脉冲的光感测器阵列中的一个或多个光感测器。在步骤s1060中,光监测装置分析从基材反射回来的光感测器阵列的信号,利用往返时间计算信号。最后,在步骤s1070中,决定基材上的制程品质。
101.图10a与图10b示出根据本揭露的一些实施方式的控制器1410的配置。在一些实施方式中,计算机系统2000被使用为控制器1410。在一些实施方式中,计算机系统2000执行上述控制器的功能。
102.图10a为计算机系统的示意图。上述实施方式的全部或部分流程、方法和/或操作可以透过计算机硬盘与在其上执行的计算机程序来实现。在图10a中,计算机系统2000设置有计算机2001,其包含只读记忆光盘驱动器2005(例如cd-rom或dvd-rom)与磁盘驱动器
2006、键盘2002、鼠标2003和显示器2004。
103.图10b为计算机系统2000的内部配置的示意图。在图10b中,除了光盘驱动器和磁盘驱动器2006之外,计算机2001还设置有一个或多个处理器,例如微处理单元(micro processing unit,mpu)2011、存有例如启动程序等程序的只读记忆体(rom)2012、与微处理单元2011相连的随机存取记忆体(random access memory,ram)2013,其可临时储存应用程序的命令,并可提供临时储存区域、以及存有应用程序、系统程序及数据的硬盘2014、以及与微处理单元2011和只读记忆体2012相连的总线2015。应注意的是,计算机2001可包含连接到区域网络(lan)的网卡(未示出)。
104.上述实施例中使计算机系统2000执行控制装置的功能的程序可以储存在光盘2021或磁盘2022中,插入光盘驱动器2005或磁盘驱动器2006,并传输到硬盘2014。或者,程序可通过网络(未示出)传输到计算机2001并储存在硬盘2014中。在执行时,程序被加载到随机存取记忆体2013中。程序可以从光盘2021或磁盘2022下载,也可以直接从网络下载。程序不需要包含,例如操作系统(os)或第三方程式以使计算机2001执行前述实施例中的控制器1410的功能。程序可只包括一个命令部分,以在控制模式下要求适合的功能(模块)并获得所需的结果。
105.在一些实施方式中,使用激光测量距离是透过使用激光干涉仪技术来进行。在其他实施方式中,距离测量是透过超声波、声纳、回声探测等方式进行。在又一些实施方式中,距离测量以使用都卜勒技术的都卜勒装置、磁感测器(磁编码器)、旋转编码器等来进行。
106.在一些实施方式中,光源1100设有狭缝。在其他实施方式中,光源1100设有可调整的狭缝。在一特定实施方式中,光源1100设有可调整的开口/孔,例如光圈调整片,其可受到制动来增加开口尺寸,进而容许更宽/更窄的光线通过光源1100,并使光线的焦距增加/减少。
107.在一些实施方式中,测量阵列1220的光测器1210所接收到的反射的激光光线的反射光强度。反射光强度是在激光光线发射器1110发射的激光光线的强度与阵列1220的光感测器1210检测到的经基材800(具体而言,基材800的上表面802)反射后的光线强度间测量。在一些实施方式中,可以比较阵列1220中的每一个光感测器1210的反射强度。若光感测器1210的反射强度在所期望的接近范围内,则可确定基材上所施加的液体实质上被均匀地施加。若光感测器1210的反射强度不在所期望的接近范围内,则可确定基材上所施加的液体实质上没有均匀地被施加。
108.在各种实施方式中,包含光源和光侦测器的光监测系统被提供以利用内全反射的工作原理,实时监控喷嘴的状态以及晶圆上的液体运动/动态。根据本揭露的实施方式,光监测系统提供了对来自喷嘴的泄漏或基材上的液体残留物的改善的识别,从而改进了检查操作并提高了半导体制程的良率。
109.可以理解的是,在此并非所有的优点都需要被讨论,并非所有实施方式或示例都需要特定的优点,其他实施方式或示例可以提供不同的优点。
110.在本揭露实施方式中,提供一种半导体元件的制造设备,其包含配置以支撑基材的旋转座以及喷嘴臂。喷嘴臂包含喷嘴及光监测装置,光监测装置包含激光发射器以及多个光感测器的阵列排列在喷嘴臂中且朝向旋转座。
111.在一些实施方式中,光监测装置配置以从激光发射器向基材发射激光光线,其中
激光光线照射在基材上。光监测装置配置以接收来自于基材的反射的激光光线,且识别接收激光光线的光感测器的阵列中的一或多个光感测器。光监测装置配置以透过分析从基材反射的光感测器的阵列的信号,来确定基材的制程品质。
112.在一些实施方式中,激光发射器是设置在喷嘴臂朝向基材的下表面。在一些实施方式中,激光发射器配置以调整激光发射器朝向基材的角度,以选择接收反射的激光光线的光感测器的一或多个光感测器。在一些实施方式中,半导体元件的制造设备还包含设置在喷嘴或喷嘴臂以外位置上的光感测器。在一些实施方式中,半导体元件的制造设备还包含分析装置,配置以在基材上的喷嘴有泄漏时发送通知。
113.在本揭露的其他实施方式中,提供一种半导体基材的检测方法。方法包含放置基材在旋转座上。将喷嘴臂定位在基材上,其中喷嘴臂包括一个或多个激光发射器以及排列在喷嘴臂中且面向基材的多个光感测器的阵列。随后,使用一个或多个的激光发射器向基材发射激光光线,其中激光光线照射在基材上。然后,在光感测器的阵列接收来自于基材反射的激光光线。识别接收激光光线的光感测器的阵列中的一或多个光感测器。透过一光监测装置分析从基材反射的光感测器的阵列的信号。随后,确定基材的制程品质是否在可接受的范围内。当基材的制程品质不在可接受范围内时,自动调整半导体制造制程的可配置参数,以将制程品质设定在可接受范围内。在一些实施方式中,可配置参数包含一个或多个:激光发射器朝向基材的倾斜角度、光感测器的阵列的光感测器数量、激光光线发射器的数量、喷嘴中心的移动速度、喷嘴至晶圆表面之间的距离、流体的种类等。
114.在一些实施方式中,确定喷嘴是否有泄漏。在一些实施方式中,当确定基材的表面上没有第一化学液体时,从喷嘴臂分配第二化学液体。在一些实施方式中,光监测装置配置以判断基材上是否有流体波纹。在一些实施方式中,当确定基材上存在流体波纹时,分析基材上的流体的流体动力学。在一些实施方式中,透过分析基材上的流体的流体动力学来确定基材上是否存在液体残留物。在一些实施方式中,光监测装置在不同时间发射激光光线。在一些实施方式中,接收来自设置在喷嘴或喷嘴臂以外位置的光感测器的反射的激光光线。在一些实施方式中,调整激光发射器朝向基材的角度以选择接收反射的激光光线的光感测器的一或多个光感测器。
115.在本揭露的其他实施方式中,提供一种半导体基材检测系统。系统包含基材支架以及耦接于基材支架的回馈控制器。基材支架包含配置以支撑基材的旋转座以及喷嘴以及排列在喷嘴臂中且面向基材的多个光监测装置的喷嘴臂。光监测装置配置以朝向基材发射激光脉冲,其中激光脉冲照射在基材上,且接着接收来自基材的反射的激光脉冲。光监测装置配置以识别接收激光脉冲的光感测器的一或多个光感测器。光监测装置配置以透过使用一反射光强度分析来自基材的光监测装置的信号,来确定基材的制程品质。
116.在一些实施方式中,光监测装置系配置以使用相机记录基材上的流体运动。在一些实施方式中,光监测装置配置以在基材上的喷嘴存在泄漏时,根据基材的制程品质发送通知。在一些实施方式中,分析装置被编程为当基材上有液体残留物时,根据基材的制程品质发送通知。在一些实施方式中,分析装置配置以基于基材的制程品质来识别化学物质。
117.上面的揭露已概述数个实施方式的特征,因此熟悉此技艺者可更了解本揭露的实施例的态样。熟悉此技艺者将了解到,其可轻易地利用本揭露的实施例做为基础,来设计或润饰其他制程与结构,以实现与在此所介绍的实施方式相同的目的及/或达到相同的优点。
熟悉此技艺者也将了解到,这类对等架构并未脱离本揭露的实施例的精神和范围,且熟悉此技艺者可在不脱离本揭露的实施例的精神和范围下,在此进行各种的更动、取代与修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1