一种架空导线绝缘层涂覆方法与流程
1.本发明属于电力系统技术领域。
背景技术:
2.森林保护区架空线路是给护林单位及周围边生活居民的唯一供电通道,远离城市且直接面向终端用户,其安全性、可靠性与林区居民及企事业单位的生活息息相关。该类线路主要为日常生活提供电源,负载比较小,架空线路均为裸线导体截面120mm2以下,电压等级为10kv,且单回路供电方式为主,没有备用电源。林区架空线路一般架设在森林与林区公路的中间,这些线路经常受到树木过快生长、鸟粪、大风、恶劣气候以及其它物体的侵害,致使线路经常跳闸断电以及发生电力危害事故,给生产和生活造成极大的损害。为了消除上述隐患,常规的办法措施是对线路停电后,将裸导线更换为绝缘导线,或是修剪树枝或砍伐树木等,但仍存以下不足:一方面停电时间长,影响供电可靠性、工程施工周期长,投资成本较高、部分地段施工困难、无法从根本上消除事故隐患;另一方面全线换成绝缘导线后,雷击引起的断线隐患无法解决。将原有的线路大规模更换为绝缘导线,时间上及经济上都不可行。
技术实现要素:
3.本发明目的是为了解决现有林区架空导线易被腐蚀,导线更换经济损失大易出现事故的问题,提出了一种架空导线绝缘层涂覆方法。
4.本发明所述的一种架空导线绝缘层涂覆方法,具体包括:
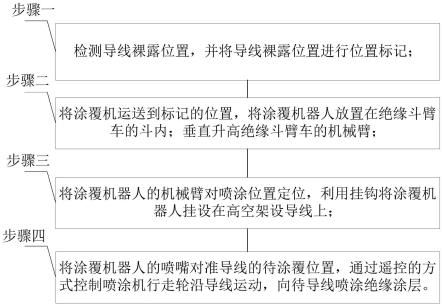
5.步骤一、检测导线裸露位置,并将导线裸露位置进行位置标记;
6.步骤二、将涂覆机运送到标记的位置,将涂覆机器人放置在绝缘斗臂车的斗内;垂直升高绝缘斗臂车的机械臂;
7.步骤三、将涂覆机器人的机械臂对喷涂位置定位,利用挂钩将涂覆机器人挂设在高空架设导线上;
8.步骤四、将涂覆机器人的喷嘴对准导线的待涂覆位置,导线绝缘层涂覆。
9.进一步地,本发明中,步骤一中,检测导线裸露位置采用无人机进行图像拍摄,在进行图像识别实现对导线裸露位置识别。
10.进一步地,本发明中,步骤一中,涂覆机器人包括涂料盒。
11.本发明中可采用交通运输车将喷涂机和绝缘斗臂车运送至导线裸露位置附近,通过调整绝缘斗臂车的机械臂的长度实现将喷涂机托举至需要喷涂导线的位置,喷涂机通过挂钩挂设在待喷涂导线上,喷嘴对准导线,沿导线往复运动实现导线的喷涂,实现自动对架空导线进行绝缘层喷涂。
附图说明
12.图1是本发明所述一种架空导线绝缘层涂覆方法的流程图。
具体实施方式
13.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
14.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
15.具体实施方式一、结合图1说明本实施方式,本实施方式所述一种架空导线绝缘层涂覆方法,具体包括:
16.步骤一、检测导线裸露位置,并将导线裸露位置进行位置标记;
17.步骤二、将涂覆机运送到标记的位置,将涂覆机器人放置在绝缘斗臂车的斗内;垂直升高绝缘斗臂车的机械臂;
18.步骤三、将涂覆机器人的机械臂对喷涂位置定位,利用挂钩将涂覆机器人挂设在高空架设导线上;
19.步骤四、将涂覆机器人的喷嘴对准导线的待涂覆位置,喷涂机通过控制轮沿导线往复运动,向导线喷涂绝缘涂层。
20.进一步地,本实施方式中,步骤一中,检测导线裸露位置采用无人机进行图像拍摄,在进行图像识别实现对导线裸露位置识别。
21.进一步地,本实施方式中,涂覆机器人包括涂料盒。
22.进一步地,本实施方式中,涂覆机器人一个或多个往复运动周期调整一次喷嘴的角度。
23.具体实施例:
24.①
检查所有安全措施是否正确完备,是否符合现场实际条件。
②
带电作业应在良好天气下进行,作业前需进行风速和湿度测量。
③
检查地形情况环境是否符合作业要求。
④
检查作业点及相邻侧电杆埋深杆身质量,导线固定,拉力受力及导线有无损伤情况。
⑤
核对线路名称和杆号。
25.第二步绝缘斗臂车作业,对绝缘斗臂车进行检查:作业前检查时,作业车应处于保管放置的状态:(水平支腿全缩、垂直支腿伸至最大行程)首先擦掉活塞杆上涂的防漆油;然后环绕车辆进行目测检查,看有无漏油、标牌及车体损坏的情况。标牌损坏及污损会影响到正确的使用,要先清除污损换上新的标牌。
26.(1)检查工作斗有无破损、变形,检查工作斗(工作斗内衬)、副吊臂、临时横杆等有无损伤、污垢及积水。
27.(2)启动发动机,产生油压,操作垂直支腿伸出,用于检查在保管中有无油缸漏油。在取力器切换后,检查传动轴等方面有无出现异响。如果垂直支腿伸出后出现自然回落的现象,须进行检。
28.(3)检查液压油的油量。
29.(4)在下面状态下进行,车辆水平设置;水平支腿全收回;工作斗摆动在中间收回状态;工作斗电源关闭;油门低速;慢操作;工作斗零负荷;性能开关切换至小臂。
30.(5)检查并确认安全装置正确动作。
31.(6)检查操作杆和开关,检查各部分动作是否正常,有无异常声响。
32.(7)检查工作斗的平衡,重复几次上臂及下臂的操作,检查工作斗是否保持在水平状态。
33.(8)检查安全带挂钩的绳索有无磨损。
34.(9)在工作斗内操纵各操作杆,检查各部分动作是否正常,有无异常声响。
35.(10)收回各液压装置至原始位置,关闭取力器及总电源,检查各部件有无漏油现象。
36.布置现场:(1)绝缘斗臂车进入现场避开附近电力线和障碍物,并能保证作业时绝缘臂的有效绝缘长度,支腿应牢固,装好接地线。
37.(2)作业现场设置围栏,距离不小于高空坠物的安全距离,不影响交通,进出口大小合适。
38.(3)绝缘工器具应该与金属器具分开放置在防潮绝缘篷布上,检查工器具及材料完好备齐,规格型号正确,试验合格证应在有效期内。
39.(4)检查并安装好涂覆机器人平稳放置在绝缘防潮篷布上,作业人员对涂覆机器人进行表面清洁,机器外壳无破损、潮湿,行走轮无异物,机器人自锁机构运行正常,电池电量充足,控制平台与机器人的连接正常,控制正确,可是模块功能正常,机器人各项功能正常。
40.施工:(1)斗内电工穿戴好全套的个人安全防护用具,工作负责人应检查斗内电工的个人防护用具的穿戴是否正确。
41.(2)斗内电工携带工器具进入绝缘斗,将安全带系挂在斗内专用挂钩上。
42.(3)经工作负责人许可后,斗内电工操作斗臂车平稳匀速上升至带电作业区域
43.(4)经工作负责人许可后,斗内电工依次对导线,绝缘子,横担进行验电,确认无漏电现象。
44.(5)绝缘涂覆的顺序根据现场导线架构而定,若相间距离符合国网公司典型设计,则可按照先中相后边相的顺序进行,本次施工采用先中相后两边相的施工顺序。
45.(6)设置隔离措施,加上绝缘导线罩,防潮绝缘毯,包括裸导线上的绝缘遮蔽,广告牌上的绝缘遮蔽,铁棚顶的绝缘遮蔽。
46.(7)斗内电工采用专用工具测量线径,并根据线径确定涂覆机器人喷头和垫片的规格。
47.(8)安装涂覆机器人,闭合喷头,确认无误后绝缘斗远离机器人。
48.(9)地面遥控操作人员控制机器人对中相导线进行绝缘涂覆。
49.(10)涂覆机器人工作至预定位置后,利用斗臂车将设备取下。
50.(11)调整斗臂车高度和位置,按照同样操作步骤进行另外两相导线带电喷涂操作。
51.(12)涂料用尽时,机器人行走到安装位置后取下,更换涂料,返回原工作位置继续作业。
52.现场工作负责人检查作业质量:工作负责人检查所有工具已收拾完毕、清理施工现场和场地恢复,做到工完料尽场地清,防止对环境造成污染。
53.虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实
施例仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其他所述实施例中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1