具有FLEX-LL功能的衬底处理设备和衬底传送方法与流程
具有flex-ll功能的衬底处理设备和衬底传送方法
技术领域
1.描述了涉及衬底处理设备和衬底传送方法的示例。
背景技术:
2.用于在诸如真空的低压空间中处理衬底的衬底处理设备包括多个加载锁定室。提供加载锁定室以防止颗粒、水蒸气和污染物进入处理室。尽管在加载锁定室中存在空槽,但晶片不能加载到加载锁定室中,或者处理过的晶片不能从加载锁定室中快速取出,这妨碍了产量的增加。
技术实现要素:
3.本文描述的一些示例可以解决上述问题。这里描述的一些示例可以提供能够增加产量的衬底处理设备和衬底传送方法。
4.在一些示例中,衬底处理设备包括多个加载端口、邻近多个加载端口的前端模块、邻近前端模块的多个加载锁定室,多个加载锁定室包括多个晶片容纳槽、邻近多个加载锁定室的晶片处理室、前端模块中的第一晶片传送装置、晶片处理室中的第二晶片传送装置,以及控制器,该控制器包括处理器和存储器,该存储器配置成使处理器执行存储在存储器中的程序,或者包括专用电路,以当满足预定的晶片传送条件时向晶片移动装置发出命令,以在多个加载锁定室之间移动晶片。
附图说明
5.图1示出了衬底处理设备的配置示例;
6.图2是第一llc及其附近的剖视图;
7.图3示出了flex-ll的执行流程图的示例;
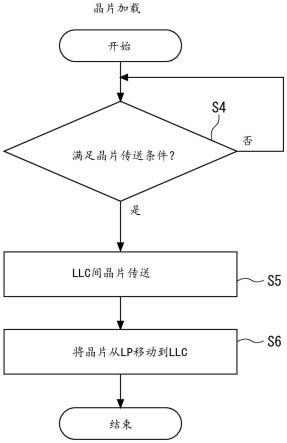
8.图4是示出flex-ll的具体示例的流程图;
9.图5a示出了满足晶片传送条件的状态;
10.图5b示出了第二llc中的晶片已被移动到第一llc;
11.图5c示出了晶片从加载端口移动到第二llc
12.图6是示出flex-ll的另一具体示例的流程图;
13.图7a示出了满足晶片传送条件的状态;
14.图7b示出了晶片已经移动到第二llc;
15.图7c示出了在第一llc中处理过的晶片已经返回到加载端口;
16.图8a示出了处理过的晶片和未处理过的晶片容纳在第一llc中;
17.图8b示出了晶片已经移动到第二llc;
18.图8c示出了处理过的晶片已被移动到加载端口;
19.图9是控制器的功能框图;
20.图10a示出了控制器的配置示例;
21.图10b示出了控制器的另一配置示例;
22.图11示出了晶片移动装置的配置示例;
23.图12示出了晶片移动装置的另一配置示例;以及
24.图13示出了通过晶片移动装置移动晶片的方法。
具体实施方式
25.将参照附图描述衬底处理设备和衬底传送方法。相同或相应的构成部件用相同的附图标记表示,并且在某些情况下省略对其的重复描述。
26.实施例
27.图1是示出衬底处理设备10的配置示例的配置示例。该衬底处理设备包括多个加载端口。在图1的示例中,提供了加载端口12、14和16。这里,加载端口的数量设定为三个,但可以是两个或四个或更多个。前端模块18邻近多个加载端口12、14和16设置。前端模块18包括例如风扇过滤器单元(ffu),并且设置为在大气压力下传送衬底。在前端模块18中有第一晶片传送装置19。根据一示例,第一晶片传送装置19是用于传送晶片的机器人。加载端口12、14和16、前端模块18和第一晶片传送装置19统称为设备前端模块(efem)或外壳。
28.第一加载锁定室(第一llc)20和第二加载锁定室(第二llc)30邻近前端模块18设置。第一llc20和第二llc30连接到真空装置,并且可被设定为大气压或真空。根据一示例,第一llc20和第二llc30是两个独立的室,并且防止气体从一个室移动到另一个室。作为参考,在图1中,提供了两个加载锁定室,但可以提供三个或更多个加载锁定室。
29.闸阀22设置在第一llc20和前端模块(fem)18之间。闸阀32设置在第二llc30和fem18之间。
30.晶片处理室(whc)40邻近第一llc20和第二llc30设置。在whc40中有第二晶片传送装置41。根据一示例,第二晶片传送装置41是用于传送晶片的机器人。闸阀24设置在第一llc20和whc40之间。闸阀34设置在第二llc30和whc40之间。反应器室42、44、46和48分别通过闸阀42a、44a、46a和48a与whc40相邻。
31.whc40经由通过室50与whc60接触。根据一示例,通过室50包括在whc60侧具有闸阀的上通过室,以及在whc40侧具有闸阀的下通过室。换句话说,在上通过室以及下通过室中,在whc40和whc60之间有一个闸阀。因此,可以使whc40和whc60的压力彼此不同。
32.反应器室64、66、68和70分别通过闸阀64a、66a、68a和70a与whc60相邻。根据一示例,反应器室42、44、46和48以及反应器室64、66、68和70可以被提供作为用于通过单晶片处理在晶片上形成外延生长膜的设备。根据一示例,第二晶片传送装置41和第三晶片传送装置62中的每个都具有垂直布置的两个臂。根据另一示例,臂的数量可以是任何数量。
33.晶片的传送由控制器28控制。根据一示例,控制器28控制第一晶片传送装置19、第二晶片传送装置41、第三晶片传送装置62和上述的每个闸阀,并使晶片传送装置沿着由控制作业指定的晶片传送路径传送晶片。
34.图1的衬底处理设备10可以不同地配置。根据一示例,可以省略通过室50、whc60和反应器室64、66、68和70。根据另一示例,用于单晶片处理的反应器室可以由双室模块(dcm)或四室模块(qcm)代替,或者由另一批量处理室代替。
35.图2是第一llc20及其附近的剖视图。第一llc20具有多个晶片容纳槽。在图2的示
例中,提供了25个晶片容纳槽20a。因此,第一llc20可以在其中容纳最多25个晶片。25个晶片容纳槽20a由轴20a支撑。该轴20a被构造成能够例如通过马达20b等的驱动而上下移动。随着轴20a上下移动,25个晶片容纳槽20a也可以上下移动。当通过使用第一晶片传送装置19或第二晶片传送装置41将晶片加载到第一llc20中或者从第一llc20中取出晶片时,通过上述升降功能,任意晶片容纳槽20a的高度被调节到第一晶片传送装置19或第二晶片传送装置41的高度。
36.作为第二llc30,可以采用与第一llc20相同的配置。在该示例中,第一llc20和第二llc30中的每个都具有多个晶片容纳槽。
37.通过控制器28的控制,例如如下执行晶片的传送。
38.(1)通过第一晶片传送装置19将晶片从加载端口12、14和16中的任何一个传送到第一llc20或第二llc30。
39.(2)通过第二晶片传送装置41将晶片从第一llc20或第二llc30传送到反应器室42、44、46和48中的任何一个或者传送到通过室50。
40.(3)通过第三晶片传送装置62将晶片从通过室50传送到反应器室64、66、68和70中的任何一个。
41.(4)通过第三晶片传送装置62将晶片从反应器室64、66、68和70中的任何一个传送到通过室50。
42.(5)通过第二晶片传送装置41将晶片从反应器室42、44、46和48中的任何一个或通过室50传送到第一llc20或第二llc30。
43.(6)通过第一晶片传送装置19将晶片从第一llc20或第二llc30传送到加载端口12、14和16中的任何一个。
44.根据一示例,晶片沿着由控制作业指定的晶片传送路径传送。除了上述晶片传送之外,该衬底处理设备还具有称为flex-ll的功能。flex-ll是通过在加载锁定室之间移动晶片来提高产量的功能。
45.图3示出了flex-ll的执行流程图的示例。首先,在步骤s1中,确定是否满足执行flex-ll的条件。执行条件是预定的“晶片传送条件”。当确定满足晶片传送条件时,过程进行到步骤s2。在步骤s2中,确定是否存在限制flex-ll执行的条件。例如,如果控制作业禁止使用其中一个加载锁定室,则在加载锁定室之间移动衬底导致违反控制作业的指令内容,因此不执行flex-ll功能。当在步骤s2中确定没有限制条件时,在步骤s3中执行flex-ll,并且衬底在加载锁定室之间移动。注意,当确定是否满足晶片传送条件时,也可以考虑上述限制条件。
46.示例1
47.图4、5a、5b和5c示出了flex-ll的具体示例。在该示例中,首先,在步骤s4中,确定是否满足晶片传送条件。该示例中的晶片传送条件包括:在第一llc20和第二llc30中存在未完成处理的晶片,并且在多个加载端口12、14和16中的任何一个中存在待传送到第一llc20或第二llc30的晶片。
48.图5a示出了满足晶片传送条件的状态。晶片a是这样的晶片,其从加载端口12取出,在反应器室中处理,然后返回到加载端口12。晶片b是这样的晶片,其从加载端口14取出,在反应器室中处理,然后返回到加载端口14。晶片c是这样的晶片,其从加载端口16取
出,在反应器室中处理,然后返回到加载端口16。在图5a中,在第一llc20中,在反应器室中被处理之前有九个晶片a,在第二llc30中,在反应器室中被处理之前有八个晶片b,并且在加载端口16中,有九个晶片c计划被移动到加载锁定室。当控制器28已经确定满足传送条件时,过程进行到步骤s5。
49.在步骤s5中,控制器28向“晶片移动装置”发出命令,并使“晶片移动装置”操作,以便获得在第一llc20和第二llc30的任何一个中没有晶片的状态。
50.在图5b中,示出了第二llc30中的八个晶片b已经被移动到第一llc20。晶片由“晶片移动装置”移动。晶片移动装置例如是第二晶片传送装置41。当晶片通过第二晶片传送装置41在加载锁之间移动时,阀24和34需要处于打开状态。根据另一示例,与图1所示的晶片传送装置不同并且专门用于在llc之间移动晶片的晶片传送装置可以用作“晶片移动装置”。当步骤s5的处理已经完成时,如图5b所示,第二llc30变为其中不存在晶片的状态。
51.根据一示例,在步骤s5中,可以移动容纳在第一llc20中的晶片或容纳在第二llc30中的晶片,移动的晶片比其他晶片的数量少。在图5的示例中,九个晶片a容纳在第一llc20中,八个晶片b容纳在第二llc30中;并且相应地,八个晶片b已经被移动到第一llc20。由此,与将第一llc20中的九个晶片a移动到第二llc30的情况相比,可以缩短晶片传送所需的时间。当然,根据另一示例,也可以操作晶片移动装置以将晶片a移动到第二llc30,并且获得第一llc20中没有晶片的状态。
52.接下来,过程进行到步骤s6。在步骤s6,控制器28向第一晶片传送装置19发出命令,并使第一晶片传送装置将晶片从多个加载端口中的任何一个移动到不包含晶片的加载锁定室,该加载锁定室是第一llc20和第二llc30中的一个。在图5c的示例中,示出了九个晶片从加载端口16移动到第二llc30。
53.如图5a所示,在第一llc20和第二llc30中都存在未处理晶片的状态下,两个llc都处于真空状态。因此,在这种状态下,不可能为了将晶片从加载端口传送到llc而将llc设置为大气压力。换句话说,不可能从加载端口将晶片加载到存在未处理晶片的llc中。然而,当执行上述flex-ll以清空一个llc时,空的llc可以返回到大气压力,并且晶片可以被运入。当晶片被新送入llc时,llc的压力在例如约300秒的时间内降低到真空,并且晶片可以在反应器室中快速经受处理。通过这种方式,可以提高吞吐量。
54.图4和5的示例可以用下面的方式总结。
55.·
多个加载端口包括第一加载端口、第二加载端口和第三加载端口。
56.·“晶片传送条件”包括:在第一llc20中有晶片,其已经从第一加载端口传送并且其处理没有完成;在第二llc30中有晶片,其已经从第二加载端口传送并且其处理没有完成;以及在第三加载端口中有晶片,其将被传送到第一llc或第二llc。
57.换句话说,在图4和图5的示例中,九个晶片a、八个晶片b和九个晶片c形成每一个组,并且导致以该组为单位被传送。每组中的晶片数量没有特别限制。以这种方式以与加载端口相关的晶片为单位进行传送有助于简化传送。因此,在该示例中,当晶片从第一llc和第二llc中的一个移动到另一个时,应该返回到加载端口12的所有晶片(第一晶片)、应该返回到加载端口14的所有晶片(第二晶片)或者应该返回到加载端口16的所有晶片(第三晶片)被移动。这里,晶片a、b和c中的任何一个可以在第一llc20中,晶片a、b和c中的任何一个可以在第二llc30中,并且晶片中的任何一个可以在等待被运送到llc中的任何加载端口
中。
58.示例2
59.图6、7a、7b和7c示出了flex-ll的另一个具体示例。在该示例中,首先,在步骤s7中,确定是否满足晶片传送条件。该示例中的晶片传送条件包括在第一llc20或第二llc30中混合已经完成处理的第一晶片和没有完成处理的第二晶片。
60.作为一示例,图7a示出了满足晶片传送条件的状态。具体地,已经在反应器室中处理过的九个晶片a’和处理前的九个晶片b容纳在第一llc20中。当控制器28已经确定满足传送条件时,过程进行到步骤s8。
61.在步骤s8中,控制器向晶片移动装置发出命令,并使晶片移动装置操作,以便获得在第一llc20和第二llc30的任何一个中只有晶片a’的状态。为了获得在第一llc20中只有晶片a’的状态,通过晶片移动装置将第一llc20中的九个晶片b移动到第二llc30。如上所述,晶片移动装置是第二晶片传送装置41或专用晶片传送装置。在图7b中,示出了晶片b已经移动到第二llc30。因此,第一llc20变成只有晶片a’存在的状态。在该示例中,当控制器向晶片移动装置发出命令并且晶片移动装置在加载锁之间移动晶片时,可以采用要在加载锁之间移动的晶片数量变得最小的移动模式。根据另一示例,也可以将九个晶片c移动到第一llc20,将九个晶片a’移动到第二llc30,从而获得仅晶片a’存在于第二llc30中的状态。
62.接下来,过程进行到步骤s9。在步骤s9中,作为处理过的晶片的晶片a’返回到加载端口。在图7c中,示出了第一llc20中的九个晶片a’已经返回到加载端口12。第一晶片传送装置19可以用于移动晶片。
63.接下来,过程进行到步骤s10。在步骤s10中,容纳晶片a’的foup从加载端口12缩回。这样,通过使用flex-ll,被处理的晶片可以在早期阶段从llc移动到加载端口,因此ll中的空槽的数量可以增加,并且被处理的晶片的传送可以加速。它能够在早期阶段将新的晶片从加载端口加载到llc中,以将处理过的晶片从llc移动到加载端口。
64.图6和7的示例可以用下面的方式总结。
65.·
多个加载端口包括第一加载端口和第二加载端口。
66.·“晶片传送条件”包括:在第一llc或第二llc中混合已经从第一加载端口传送并已完成处理的第一晶片和已经从第二加载端口传送并未完成处理的第二晶片。
67.·
从控制器向晶片移动装置发出的命令是操作晶片移动装置,并获得仅第一晶片存在于第一llc和第二llc的任何一个中的状态。
68.具体地,在图6和7的示例中,九个晶片a’、九个晶片b和九个晶片c各自形成一个组,并且导致以该组为单位被传送。每组中的晶片数量没有特别限制。以这种方式以与加载端口相关的晶片为单位进行传送有助于简化传送。这里,只要未处理的晶片容纳在一个llc中,晶片a’、b和c中的任何晶片可以存在于第一llc20中,或者晶片a’、b和c中的任何晶片可以存在于第二llc30中。在第二示例以及第一示例中,各种修改是可能的。例如,将被收回到加载端口的处理过的晶片被确定为晶片a’,但晶片b’、晶片c’或者晶片a’、b’和c’的混合物可被确定为被收回。
69.示例3
70.图8a、8b和8c示出了flex-ll的另一个具体示例。该示例与第二示例有许多相似之处,并且流程图与第二示例中参考的图6的流程图相同。在下文中,将主要描述与第二示例
的不同之处。第三示例与第二示例的不同之处在于,在flex-ll的操作开始时,第二llc30中没有晶片。
71.首先,在步骤s7中,检查处理已经完成的第一晶片和处理没有完成的第二晶片是否在第一llc20或第二llc30中混合。在图8a中,示出了九个处理过的晶片a’和处理前的九个晶片b容纳在第一llc20中。当控制器28已经确定满足传送条件时,过程进行到步骤s8。
72.接下来,在步骤s8中,九个晶片b被移动到第二llc30。在图8b中,示出了九个晶片b已经移动到第二llc30。
73.接下来,在步骤s9中,九个晶片a’从第一llc20移动到加载端口12。在图8c中,示出了晶片a’已经被移动到加载端口12。
74.接下来,在步骤s10中,从加载端口12执行foup。以这种方式,通过flex-ll的处理,可以在早期阶段将晶片a’从llc移动到加载端口。
75.还可以接受的是,以不同于第一至第三示例的模式在llc之间执行晶片传送,并实现产量的提高。具体地,flex-ll的功能不限于上述具体示例,并且还可以具有另一方面。可以采用能够提高产量的所有实施例,例如,通过将晶片从多个加载端口移动到第一llc和第二llc中的至少一个;并且通过获得在第一llc或第二llc中没有晶片的状态,或者通过获得在第一llc或第二llc中只有处理过的晶片的状态,通过将晶片从第一llc和第二llc中的一个移动到另一个。
76.根据一示例,可以向上述每个示例中所示的晶片传送条件添加以下限制条件。
77.限制条件1:
78.指定晶片传送路径的过程作业应允许使用第一llc和第二llc。
79.更具体地,正在执行的控制作业或用作flex-ll执行的触发器的控制作业可以添加这样的限制条件,即两个llc都需要可用。换句话说,在用户有意指定llc1和llc2中的任何一个的控制作业正在被执行或被调度执行的情况下,由于flex-ll的功能,这种指定可能无法实现,因此确定不满足flex-ll的晶片传送条件。
80.根据另一示例,可以添加以下限制条件。
81.限制条件2:
82.一个控制作业不应传送属于多个加载端口的晶片。
83.具体而言,当在衬底处理设备处理同时传送从某个加载端口取入或取出的晶片和从另一个加载端口取入或取出的晶片的控制作业的情况下使用flex-ll时,传送的逻辑(计算)变得复杂,因此增加了上述限制条件。
84.根据另一示例,可以添加以下限制条件。
85.限制条件3:
86.从一个加载端口放入和取出的晶片不存在于第一llc和第二llc中。
87.例如,当晶片a存在于第一llc和第二llc中时,flex-ll的逻辑变得复杂,因此,在这种情况下,flex-ll不能被执行。作为限制条件3的修改示例,当从一个加载端口取入和取出的晶片被控制作业调度为传送到第一llc和第二llc时,从一个加载端口取入和取出的晶片通过flex-ll仅前进到第一llc或第二llc是可接受的。
88.根据另一示例,可以添加以下限制条件。
89.限制条件4:
90.不存在这样的专用条件:一个llc只能接收从一个加载端口放入和取出的晶片。
91.例如,在只有晶片a可以加载到一个llc中的情况下,不优选将晶片a移动到另一个llc;因此,可以添加该限制条件。
92.顺便说一下,当在llc之间移动晶片时,如果源llc中的待移动晶片数量和目的地llc中的晶片数量之和大于25,则不能完成llc之间的晶片移动。然后,在确认这种问题没有发生之后,控制器执行晶片在llc之间的移动是可以接受的。
93.图9是控制器的功能框图。控制器28可以包括flex-ll条件确定单元28a,其确定是否满足用于执行flex-ll的晶片传送条件。此外,如果需要,可以提供用于确定是否满足限制条件的限制确定单元28b。当限制条件没有被添加到晶片传送条件时,可以省略限制确定单元28b。当确定条件确定单元28a和可选设置的限制确定单元28b都满足条件时,通过flex-ll执行单元28c在上述llc之间移动晶片。
94.图10a示出了控制器28的配置示例。控制器包括处理电路28x。由控制器28执行的每个上述功能由处理电路28x实现。具体地,处理电路28x确定是否满足预定的晶片传送条件,并且当满足晶片传送条件时,向晶片移动装置发出命令以在第一加载锁定室和第二加载锁定室之间移动晶片。处理电路28x可以是执行存储在存储器中的程序的专用硬件(专用电路)或cpu(也称为“中央处理单元”、“处理装置”、“计算装置”、“微处理器”、“微型计算机”、“处理器”或“dsp”)。当处理电路28x是专用硬件时,处理电路28x对应于单个电路、复合电路、编程处理器、并行编程处理器、asic、fpga或这些单元的组合。控制器的每个功能可以由每个处理电路实现,或者各自的功能可以由处理电路共同实现。
95.图10b示出了当处理电路是cpu时控制器28的配置示例。在这种情况下,上述一系列处理由软件、固件或软件和固件的组合来实现。软件或固件被写成程序并存储在计算机可读存储器28z中。自动执行图3、4、6中的流程。处理器28y通过读取和执行存储在存储器28z中的程序来实现上述各个功能。简而言之,该程序使计算机执行上述各个功能,例如步骤s1-s3、s4-s6或s7-s10。存储器对应于非易失性或易失性半导体存储器,例如ram、rom、闪存、eprom、eeprom、磁盘、软盘、光盘、压缩盘、迷你盘或dvd等。自然地,控制器28的一部分可以由专用硬件实现,而另一部分可以由软件或固件实现。
96.因此,上述每个功能通过处理器执行存储在存储器中的程序来实现,或者通过专用电路的处理来实现。
97.在上述示例中,第二晶片传送装置41被构造成将晶片从第一llc20和第二llc30中的一个移动到另一个。然而,可以使用专用设备在llc之间移动晶片。图11至13示出了这种专用晶片传送装置的示例。
98.图11示出了晶片移动装置的配置示例。晶片移动装置包括加载间锁定室80、闸阀82和84以及加载间锁定晶片传送装置86。加载间锁定室80分别经由闸阀82和84与第一llc20和第二llc30连通。加载间锁定晶片传送装置86设置在加载间锁定室80中。加载间锁定晶片传送装置86例如是用于传送晶片的机器人。加载间锁定晶片传送装置86可以设置在加载间锁定室80中、第一llc中或第二llc中。当晶片通过flex-ll的功能从第一llc和第二llc中的一个移动到另一个时,该移动通过打开闸阀82和84以及通过使用加载间锁定晶片传送装置86来实现。
99.图12示出了根据另一示例的晶片移动装置的配置示例。闸阀90设置在彼此相邻设
置的第一llc20和第二llc30之间。当闸阀90打开时,第一llc20和第二llc30在空间上彼此连接,当闸阀90关闭时,第一llc20和第二llc30之间的气体和物体的运动被阻断。在该示例中,晶片移动装置91设置在第二llc30中。晶片移动装置91是机器人、臂或传送带,当闸阀90处于打开状态时,其将晶片从第一llc20和第二llc30中的一个移动到另一个。晶片移动装置91可以设置在第一llc20中。在该示例中,示出了传送带类型的晶片移动装置91。
100.图13是用于解释通过晶片移动装置91移动晶片的方法的视图。当闸阀90处于打开状态时,晶片移动装置91在x-y平面中旋转,并且由此,晶片移动装置变成在晶片移动方向上(换句话说,在x方向上)延伸较长的状态。在这种状态下,驱动晶片移动装置91的带,从而将晶片从第一llc20和第二llc30中的一个移动到另一个。
101.如图11至图13所示,由于设置了专用的晶片移动装置,在llc之间移动晶片期间,第二晶片传送装置41可以用于另一目的,因此,可以预期产量的进一步提高。此外,已经提供的专用晶片移动装置使得在不打开闸阀24和34的情况下在llc之间移动晶片成为可能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1