自弹出式电连接系统的制作方法
自弹出式电连接系统
相关申请的交叉引用
1.本技术要求于2022年1月31日提交的美国申请第17/588,955号和2021年7月29日提交的美国临时申请第63/227,117号的优先权,其中每一个申请的全部公开内容以参见的方式纳入本文。
技术领域
2.本公开涉及一种带有自弹出特征的电连接器。
背景技术:
3.现有的具有自弹出特征的电连接系统不能完全引导锁定装置上的推力构件。由于聚合物蠕变,由塑料制成的锁定装置会随着时间的推移而失效。现有电连接系统通常需要在阳型连接器壳体中的附加特征以提供自弹出功能。
技术实现要素:
4.根据本公开的一个或多个方面,一种电连接器系统包括限定锁定翅片的第一连接器本体、构造成接纳第一连接器本体的第二连接器本体、以及由第二连接器限定的挠性锁定臂,挠性锁定臂构造成可释放地接合锁定翅片。柱塞可滑动地附连到第二连接器本体并且可从接合位置移动到脱离位置,在接合位置中,柱塞保持锁定臂与锁定翅片接合,在脱离位置中,柱塞使锁定臂与锁定翅片脱离接合。电连接器系统还包括设置在柱塞和第二连接器本体之间的弹簧。该弹簧构造成将柱塞推入接合位置中。
5.在根据先前段落的电连接器系统的一个或多个实施例中,随着第一连接器本体插入第二连接器本体内,柱塞的挠性臂上的推动表面接触第一连接器本体的前端,从而压缩弹簧并将柱塞从接合位置移动到脱离位置。
6.在根据先前段落中任一段落的电连接器系统的一个或多个实施例中,第二连接器本体构造成随着柱塞到达脱离位置,挠性臂弯曲,使得推动表面不再接触第一连接器本体的前端,从而允许柱塞从脱离位置返回到接合位置。
7.在根据先前段落中任一段落的电连接器系统的一个或多个实施例中,当推动表面与前端接触时,弹簧的压缩导致柱塞的挠性臂上的推动表面在第一连接器本体的前端上施加力,从而推动第一连接器本体和第二连接器本体分开。
8.在根据先前段落中任一段落的电连接器系统的一个或多个实施例中,第二连接器本体限定引导通道,挠性臂的一部分设置在该引导通道中。引导通道限定斜面表面,该斜面表面构造成使挠性臂弯曲,使得随着柱塞到达脱离位置,推动表面不再接触第一连接器本体的前端。
9.在根据先前段落中任一段落的电连接器系统的一个或多个实施例中,柱塞限定具有第一成角度表面的第一凸片部,并且锁定臂限定具有第二成角度表面的第二凸片部。随着柱塞从接合位置移动到脱离位置,第一成角度表面接触第二成角度表面,从而将锁定臂
的端部提升到锁定翅片上方。
10.在根据先前段落中的任一段落的电连接器系统的一个或多个实施例中,当柱塞处于脱离位置时,第一凸片部将锁定臂的端部保持在锁定翅片上方。
11.在根据先前段落中的任一段落的电连接器系统的一个或多个实施例中,当柱塞处于脱离位置时,柱塞构造成将锁定臂提升到锁定翅片上方。
12.在根据先前段落中的任一段落的电连接器系统的一个或多个实施例中,锁定臂限定孔口,当柱塞处于接合位置时,将锁定翅片接纳在该孔口中。
13.在根据先前段落中任一段落的电连接器系统的一个或多个实施例中,柱塞和第二连接器本体由聚合材料形成。电连接器系统还包括设置在第二连接器本体内的金属夹。弹簧设置在柱塞和金属夹之间。
14.在根据先前段落中任一段落的电连接器系统的一个或多个实施例中,当柱塞从接合位置移动到脱离位置时,弹簧被压缩。
15.在根据先前段落中任一段落的电连接器系统的一个或多个实施例中,当柱塞处于接合位置时,弹簧松驰。
16.在根据先前段落中任一段落的电连接器系统的一个或多个实施例中,当柱塞处于接合位置时,柱塞的一部分阻止锁定臂的向上运动,从而提供连接器位置保证。
17.根据本公开的一个或多个方面,一种连接电连接器系统的方法,该电连接器系统包括限定锁定翅片的第一连接器本体;构造成接纳第一连接器本体的第二连接器本体;由第二连接器本体限定的挠性锁定臂,挠性锁定臂构造成可释放地接合锁定翅片;柱塞,柱塞可滑动地附连到第二连接器本体并且可从接合位置移动到脱离位置,在接合位置中,柱塞保持锁定臂与锁定翅片接合,在脱离位置中,柱塞使锁定臂与锁定翅片脱离接合;以及弹簧,弹簧设置在柱塞和第二连接器本体之间并构造成将柱塞推入接合位置,该方法包括以下步骤:
·
将第二连接器本体插入第一连接器本体内;
·
随着第一连接器本体插入第二连接器本体内,经由柱塞的挠性臂上的推动表面和第一连接器本体的前端之间的接触,将柱塞从接合位置移动到脱离位置;
·
随着柱塞从接合位置移动到脱离位置,压缩弹簧,从而在第一连接器本体的前端上施加力,并推动第一连接器本体和第二连接器本体分开;
·
随着柱塞从接合位置移动到脱离位置,将挠性锁定臂提升到锁定翅片上方;
·
随着柱塞到达脱离位置,挠性臂弯曲,使得推动表面不再接触第一连接器本体的前端;
·
因为推动表面不再与前端接触,随着弹簧解压缩,将柱塞从脱离位置移动到接合位置;以及
·
随着柱塞移回接合位置,锁定臂降低到锁定翅片上方,使得锁定翅片被接纳在锁定臂内的孔口内,从而将第一连接器本体固定到第二连接器本体。
18.在根据先前段落的方法的一个或多个实施例中,该方法还包括在柱塞处于接合位置时,通过将柱塞的部分定位在锁定臂上方来阻止锁定臂的向上运动,从而提供连接器位置保证。
19.在根据先前段落中任一段落的方法的一个或多个实施例中,当柱塞从接合位置移
开时,弹簧被压缩。
20.在根据先前段落中任一段落的方法的一个或多个实施例中,当柱塞处于接合位置时,弹簧松驰。
21.根据本公开的一个或多个方面,一种断开电连接器系统的方法,该电连接器系统包括限定锁定翅片的第一连接器本体;构造成接纳第一连接器本体的第二连接器本体;由第二连接器限定的挠性锁定臂,挠性锁定臂构造成可释放地接合锁定翅片;柱塞,柱塞可滑动地附连到第二连接器本体并且可从接合位置移动到脱离位置,在接合位置中,柱塞保持锁定臂与锁定翅片接合,在脱离位置中,柱塞使锁定臂与锁定翅片脱离接合;以及弹簧,弹簧设置在柱塞和第二连接器本体之间并构造成将柱塞推入接合位置,该方法包括以下步骤:
·
将柱塞从接合位置移动到脱离位置;
·
随着柱塞从接合位置移动到脱离位置,将挠性锁定臂提升到锁定翅片上方;
·
随着柱塞从接合位置移动到脱离位置,压缩弹簧;
·
将第一连接器本体从第二连接器本体中退出;以及
·
随着弹簧解压缩,柱塞从脱离位置移动到接合位置,从而经由柱塞的挠性臂上的推动表面与第一连接器本体的前端之间的接触,将第一连接器本体与第二连接器本体分开。
22.在根据先前段落的方法的一个或多个实施例中,随着柱塞从接合位置移出,弹簧被压缩。
23.在根据先前段落中任一段落的方法的一个或多个实施例中,当柱塞处于接合位置时,弹簧松驰。
附图说明
24.现在将参考附图借助示例描述本发明,附图中:
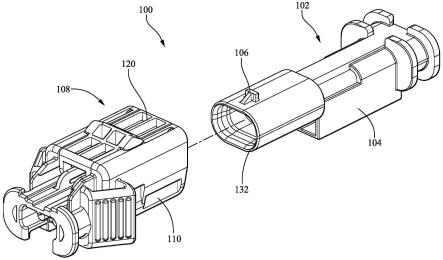
25.图1是根据一些实施例的处于断开状态的电连接器组件的立体图;
26.图2是根据一些实施例的电连接器之一的分解图;
27.图3a是根据一些实施例当第一连接器本体的前端接触第二连接器本体中的柱塞的推动表面时,在电连接器组件的连接的初始阶段期间,电连接器组件的横截面侧视图;
28.图3b是根据一些实施例在图3a所示的电连接器组件的连接的初始阶段期间,电连接器组件的剖切立体图,示出了第二连接器本体和柱塞之间的弹簧的状态;
29.图4a是根据一些实施例当柱塞从接合位置向脱离位置移动时,在图3a所示的初始阶段之后的电连接器组件的连接阶段期间,电连接器组件的横截面侧视图;
30.图4b是根据一些实施例在图4a所示的电连接器组件的连接阶段期间,电连接器组件的剖切立体图,示出了第二连接器本体和柱塞之间的弹簧的状态;
31.图5a是根据一些实施例在图4a所示阶段之后的电连接器组件的连接阶段期间,电连接器组件的横截面侧视图,此时第二连接器本体中的斜面使柱塞的推动表面移动脱离与第一连接器本体的前端的接触,并且在柱塞处于脱离位置的同时,柱塞将第二连接器本体中的锁定臂提升到第一连接器本体上的锁定翅片上方;
32.图5b是根据一些实施例在图5a所示的电连接器组件的连接阶段期间,电连接器组
件的剖切立体图,示出了第二连接器本体和柱塞之间的弹簧的状态;
33.图6a是根据一些实施例在图5a所示阶段之后的电连接器组件连接的最后阶段期间,电连接器组件的横截面侧视图,此时随着柱塞返回接合位置,柱塞将锁定臂降低到锁定翅片上;
34.图6b是根据一些实施例在图6a所示的电连接器组件的连接的最后阶段期间,电连接器组件的剖切立体图,示出了第二连接器本体和柱塞之间的弹簧的状态;
35.图7是根据一些实施例的电连接器组件的横截面侧视图,示出了柱塞的一部分,该部分构造成在柱塞处于接合位置的同时抑制锁定臂和锁定翅片之间的脱离;
36.图8是根据一些实施例的电连接器组件的横截面侧视图,示出了第二连接器本体的形成前止挡件的一部分,该前止挡件构造成抑制柱塞向前移动到接合位置;
37.图9是根据一些实施例的在电连接器组件断开的初始阶段期间,电连接器组件的横截面侧视图;
38.图10是根据一些实施例当柱塞从接合位置向脱离位置移动时,在图9所示的初始阶段之后的电连接器组件的断开阶段期间,电连接器组件的横截面侧视图;
39.图11是根据一些实施例在图10所示阶段之后的电连接器组件的断开阶段期间,电连接器组件的横截面侧视图,此时柱塞将第二连接器本体中的锁定臂提升到第一连接器本体上的锁定翅片上方;
40.图12a是根据一些实施例当柱塞处于脱离位置时,在图11所示的阶段之后的电连接器组件的断开阶段期间,电连接器组件的横截面侧视图;
41.图12b是根据一些实施例在图12a所示的电连接器组件的连接阶段期间,电连接器组件的剖切立体图,示出了第二连接器本体和柱塞之间的弹簧的状态;
42.图13a是根据一些实施例在图12a所示的阶段之后的电连接器组件的断开阶段期间,电连接器组件的横截面侧视图,此时,随着第一连接器本体从第二连接器本体中退退出,柱塞朝向脱离位置移动;
43.图13b是根据一些实施例在图13a所示的电连接器组件的断开阶段期间,电连接器组件的剖切立体图,示出了第二连接器本体和柱塞之间的弹簧的状态;
44.图14a是根据一些实施例在图13b所示的阶段之后的电连接器组件的断开阶段期间,电连接器组件的横截面侧视图,此时,随着第一连接器本体从第二连接器本体中退退出,柱塞朝向接合位置移动;
45.图14b是根据一些实施例在图14a所示的电连接器组件的断开阶段期间,电连接器组件的剖切立体图,示出了第二连接器本体和柱塞之间的弹簧的状态;
46.图15是根据一些实施例的在电连接器组件断开的最后阶段期间,电连接器组件的剖切立体图;
47.图16a是根据一些实施例的电连接器组件的柱塞的立体图;
48.图16b是根据一些实施例的柱塞的侧视图;以及
49.图17是根据替代实施例的电连接器之一的分解图。
具体实施方式
50.本公开涉及一种电连接器系统,其中两个配合连接器构造成自弹出或自动分离,
除非完全且适当地配合在一起。这种自弹出特征有助于确保在配合连接器之间建立并保持正确的连接,因为与部分配合的连接器相比,组装操作员更容易检测到分离的连接器。连接器中的一个包括弹簧或类似的力产生装置,其构造成将连接器推开,直到每个配合连接器中的锁定特征正确接合。连接器系统还包括可移动柱塞,随着它在接合位置和脱离位置之间移动,可移动柱塞锁定和解锁锁定特征。柱塞还包括连接器位置保证(cpa)特征,该特征构造成当柱塞处于接合位置时抑制锁定特征的无意解锁和断开。当柱塞处于接合位置时,柱塞将弹簧带到松弛状态。可以使用柱塞手动脱开锁定特征以断开两个配合连接器。当发生这种情况时,弹簧将推动两个配合连接器分开以断开电连接。
51.这种电连接器系统100的非限制性示例在图1中示出。电连接器系统包括第一连接器102,在该示例中为阳型连接器,其具有由电绝缘材料形成的第一连接器本体104。第一连接器本体104在第一连接器本体104的前边缘附近限定了锁定翅片106。如本文所使用的,前向和后向方向是相对于第一连接器102的纵向轴线在第一连接器102插入电连接器系统100的第二配合连接器108内的方向上参考的。锁定翅片106在其前向面上具有相对于第一连接器本体104的锐角表面,并且在其后向面上具有垂直表面。第二连接器108,在该示例中为阴型连接器并且在图2中更详细地示出,具有第二连接器本体110,该第二连接器本体110限定了护罩112,护罩112构造成接纳第一连接器本体104。第一连接器102包括设置在第一连接器本体104内的多个电气端子114,这些电气端子114设计成与设置在第二连接器108的第二连接器本体110内的多个对应配合电气端子116配合,如图9中最佳所示。
52.第二连接器本体110包括挠性锁定臂118,其构造成可释放地接合锁定翅片106,以保持第一连接器本体104和第二连接器本体110之间的连接,从而保持在第一连接器本体104中的电气端子114和第二连接器108的第二连接器本体110中的配合电气端子116之间的连接。
53.第二连接器108还包括可滑动地附连到第二连接器本体110的柱塞120。柱塞120可从接合位置122移动到脱离位置124,在接合位置122中,柱塞120保持锁定臂118与锁定翅片106接合,在脱离位置124中,柱塞120使锁定臂118与锁定翅片106脱离接合。
54.第二连接器108还包括成对压缩螺旋弹簧126,其设置在柱塞120和第二连接器本体110之间。这些弹簧126构造成将柱塞120推入接合位置122中。在替代实施例中,这些弹簧可以由可将柱塞120推入接合位置122中的其他类型的弹簧代替,例如片压缩弹簧、聚合物压缩弹簧、气动压缩弹簧或拉伸弹簧。随着第一连接器本体104插入第二连接器本体110内,柱塞120的挠性臂130前端上的推动表面128接触第一连接器本体104的前端132,从而压缩弹簧126,并使柱塞120从接合位置122移动到脱离位置124,如图3a和4a所示。弹簧126的压缩在第一连接器本体104和第二连接器本体110之间施加力,该力将第一连接器102和第二连接器108推开。随着第一连接器102和第二连接器108配合,组装操作者通过施加到第一连接器102和第二连接器108的反作用力的施加来克服该力。如本文所用,前后方向是相对于第二连接器108的纵向轴线在第二连接器108与第一连接器102配合的方向上参考的。
55.在图16a和16b中最佳示出的挠性臂130的部分134设置在第二连接器本体110中的引导通道136内,并且该引导通道136的后端限定成角度的斜面特征138。当柱塞120被拉回到如图5a所示的脱离位置124时,斜面特征138使挠性臂130向上弯曲,使得推动表面128不再接触第一连接器本体104的前端132,如图6a所示。这允许柱塞120从脱离位置124朝向接
合位置122返回。
56.如图4a所示,柱塞120限定在其后端上具有第一成角度表面142的第一凸片部140,并且锁定臂118限定在其前端上具有第二成角度表面146的第二凸片部144。如图4a所示,随着柱塞120从接合位置122移动到脱离位置124,第一成角度表面142接触第二成角度表面146,并且将锁定臂118的前端提升到第一连接器本体104的锁定翅片106的上方。当柱塞120处于脱离位置124时,第一凸片部140将锁定臂118的前端提升到锁定翅片106上方并保持在锁定翅片106上方,从而使锁定臂118从锁定翅片106脱开,并允许第一连接器本体104从第二连接器本体110分离和移除。
57.锁定臂118限定孔口148,在柱塞120从脱离位置124移动到接合位置122并且第一凸片部140不再与第二凸片部144接合之后,锁定翅片106被接纳在孔口148中,如图7所示。
58.当柱塞120从接合位置122移动到脱离位置124时,弹簧126被压缩,而当柱塞120处于接合位置122时,弹簧126松驰,如图3b、4b、5b和6b所示。
59.柱塞120和第二连接器本体110由聚合材料形成。在图17所示的替代实施例中,电连接器系统100还包括设置在第二连接器本体110内的金属夹150。弹簧126设置在柱塞120和金属夹150之间。金属夹提供减少随时间推移会发生的第二连接器本体110中的聚合物蠕变量的益处。
60.柱塞120的部分152构造成当柱塞120处于接合位置122时阻止锁定臂118向上运动,从而提供连接器位置保证功能。
61.柱塞120的前端154可以接触第二连接器本体110,以防止柱塞120移动超出接合位置122,如图8所示。
62.一种连接上述电连接器系统的方法包括以下步骤:
·
将第二连接器本体110插入第一连接器本体104内,如图3a所示;
·
随着第一连接器本体104插入第二连接器本体110内,经由柱塞120的挠性臂130上的推动表面128和第一连接器本体104的前端132之间的接触,将柱塞120从接合位置122移动到脱离位置124,如图4a和5a所示;
·
随着柱塞120从接合位置122移动到脱离位置124,压缩弹簧126,从而在第一连接器本体104的前端132上施加力,并推动第一连接器本体104和第二连接器本体110分开,如图4b和5b所示;
·
随着柱塞120从接合位置122移动到脱离位置124,将挠性锁定臂118提升到锁定翅片106上方,如图5a所示;
·
随着柱塞120到达脱离位置124,使挠性臂130弯曲,使得推动表面128不再接触第一连接器本体104的前端132,如图5a所示;
·
由于推动表面128不再与前端132接触,随着弹簧126解压缩,将柱塞120从脱离位置124移动到接合位置122,如图6a和6b所示;以及
·
随着柱塞120移回接合位置122,将锁定臂118降低到锁定翅片106上方,使得锁定翅片106被接纳在锁定臂118内的孔口148内,从而将第一连接器本体104固定到第二连接器本体110,如图6a所示。
63.该方法还可以包括以下步骤:在柱塞120处于接合位置122时,通过将柱塞120的部分152定位在锁定臂118上方来阻止锁定臂118向上运动,从而提供连接器位置保证,如图7
所示。
64.随着柱塞120从接合位置122移出,弹簧126被压缩,并且当柱塞120处于接合位置122时,弹簧126松驰,如图3b、4b、5b和6b所示。
65.一种断开上述电连接器系统的方法包括以下步骤:
·
将柱塞120从接合位置122移动到脱离位置124,如图9和10所示;
·
随着柱塞120从接合位置122移动到脱离位置124,将挠性锁定臂118提升到锁定翅片106上方,如图11所示;
·
随着柱塞120从接合位置122移动到脱离位置124,压缩弹簧126,如图12b所示;
·
将第一连接器本体104从第二连接器本体110中退出,如图14a和15所示;以及
·
随着弹簧126解压缩,将柱塞120从脱离位置124移动到接合位置122,如图12a、12b、13a、13b、14a和14b所示,从而经由柱塞120的挠性臂130上的推动表面128和第一连接器本体104的前端132之间的接触,使第一连接器本体104与第二连接器本体110分离。
66.随着柱塞120从接合位置122移出,弹簧126被压缩,并且当柱塞120处于接合位置122时,弹簧126松驰,如图12b、13b和14b所示。
67.虽然已经参照一个或多个示例性实施例描述了本发明,但是本领域的技术人员应理解的是,可进行各种变化且其元件可由等同物替代而不脱离本发明的范围。此外,可以作各种修改以使得具体的情形或材料适应本发明的教导,而不偏离其主要范围。因此,本发明并不旨在限制于所公开的一个或多个实施例,而是会包括落在所附权利要求书内的所有实施例。
68.如本文使用的,“一个或多个”包括由一个元件执行的功能、例如以分布的形式由超过一个元件执行的功能、由一个元件执行若干功能、由若干元件执行若干功能、或以上这些的任意组合。
69.还应理解,尽管在一些情况下术语“第一”、“第二”等在本文中用于描述各种元件,但是这些元件不应由这些术语限制。这些术语仅用于将一个元件与另一个元件区分。例如,在不脱离各种所述实施例的范围的情况下,第一接触件可以被称为第二接触件,并且类似地,第二接触件可以被称为第一接触件。第一接触件和第二接触件都是接触件,但它们不是相同的接触件。
70.在本文的各种实施例的描述中使用的术语仅用于描述特定实施例的目的,而不是旨在限制。如在各种所述实施例的说明书中和所附权利要求中所使用的,单数形式“一”、“一个”和“该”意在同样包括复数形式,除非上下文明确指出了其它情形。还应当理解,术语“和/或”包括一个或多个相关联列出项目的任何和所有组合。还应当理解,在本文中所使用的术语“包括”特指存在所陈述的特征、整体、步骤、操作、元件和/或部件,但并不排除存在或附加一个或多个其它特征、整体、步骤、操作、元件、部件和/或它们的组合。
71.如在本文中所使用的,取决于上下文,术语“如果”可选地被解释为表示当
“……
时”或“在......时或“响应于确定”或“响应于检测”。类似地,取决于上下文,短语“如果确定”或如果检测到“[所陈述的状况或事件]”可选地被解释为表示“在决定
……
时”或“响应于决定”或“[在检测到所述条件或事件]时”或“响应于检测到[所述的条件或事件]”。
[0072]
另外,虽然本文可使用条例或取向的术语,但这些元件不应受这些术语的限制。除非另有说明,否则所有条例或定向用于区分一个元件与另一个元件的目的,并且除非另有
说明,否则不表示任何特定顺序、操作顺序、方向或取向。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1