多功能机械手及其晶圆加工装置的制作方法
1.本实用新型涉及晶圆贴膜技术领域,特别是涉及一种多功能机械手。
背景技术:
2.碳化硅晶圆经过激光隐切加工,激光束聚焦在晶圆内部,对焦点位置晶圆形成瞬间高温,在晶圆内部形成一系列纵横交错的破坏层,碳化硅晶圆硬度较高无法通过扩膜方式使晶圆裂开,需要适合设备沿晶圆切割道一条一条破开,芯片表面对碎屑敏感,裂片过程中在晶圆表面贴一层pe膜,防止裂片机构的劈刀和晶圆表面直接接触,也防止劈裂过程中产生的碎屑溅污染芯片。
3.目前在贴膜时,用到的膜为复合膜。复合膜经过放膜机构、移膜机构、切膜机构和贴膜机构。在晶圆上贴附的膜为pe膜。切割后的pe膜的面积往往大于晶圆盘,就会造成不方便将晶圆盘放回料仓盒中。
技术实现要素:
4.为解决上述技术问题,本实用新型提供一种将晶圆从料仓中取出,并具有定位、切割功能的多功能机械手。
5.具体方案如下:
6.多功能机械手,包括底座,底座侧方固定有吸盘机械手,与吸盘机械手所在侧壁的相对侧壁设置旋转切割组件,与吸盘机械手所在侧壁的相邻侧壁设置视觉系统,视觉系统的朝向与旋转切割组件的朝向一致。
7.所述旋转切割组件包括:固定在底座侧壁的旋转驱动装置、固定在旋转驱动装置输出轴末端的旋转臂和与旋转臂端部连接的可调刀轮组,其特征在于,所述可调刀轮组包括:刀轮安装座、摆动装置、活动板和刀轮;刀轮安装座固定在旋转臂端部,活动板与刀轮安装座之间通过摆动装置连接,刀轮暗转挂在活动板底部,在刀轮安装座远离旋转电机的端设置有u型缺口,摆动装置包括摆动板、摆动轴、调节板、调节丝杠和活动板;摆动板通过摆动轴设置在u型缺口内,摆动轴通过轴承固定在u型缺口的侧壁上,且摆动板与u型缺口相邻的侧壁之间留有余量;u型缺口的顶部和底部均固定有调节板,调节板底部开设有与u型缺口相对应的凹槽,顶部开设有调节孔;调节丝杠穿过调节孔并贯穿摆动板,且调节丝杠的径向面积小于调节孔的径向面积,并与摆动板之间为螺纹连接,丝杠的端部均螺纹连接有蝶形螺母;活动板与摆动板伸出u型缺口的侧壁连接。
8.蝶形螺母与调节板之间设置有半圆垫片,且半圆垫片穿过调节丝杠,半圆垫片的弧形面与调节板接触。
9.活动板与摆动板之间连接有缓冲装置,缓冲装置包括缓冲基板、缓冲弹簧、缓冲限位轴、直线导轨和缓冲挡板;缓冲挡板固定在活动板顶部;缓冲基板与摆动轴伸出u型缺口的侧壁连接,缓冲基板与直线导轨的滑块连接,直线导轨中的导轨固定在活动板上;缓冲限位轴穿过缓冲挡板,且一端与活动基板连接,另一端连接有缓冲垫片,缓冲垫片与缓冲挡板
之间套设有缓冲弹簧。
10.活动板底部固定有门型刀轮固定座;刀轮同轴固定有刀轮轴承,通过刀轮销轴转动连接在门型刀轮固定座并通过刀轮卡簧对刀轮进行固定。
11.旋转驱动装置包括旋转电机、旋转切割刀固定板、电机安装座和旋转轴;电机安装座固定在旋转切割刀固定板,旋转切割刀固定板与底座连接,旋转轴固定旋转电机的输出端,并且末端与旋转机械臂连接。
12.多功能机械手固定在六轴机械臂上。
13.本实用新型通过六轴机械臂控制多功能机械手开始工作,并能摆放到指定位置,工作过程中灵活方便,切割组件中通过控制蝶形螺母调节刀轮角度,进行精准的切割,视觉系统能够精准定位到晶圆的圆心以及晶圆的边缘。
附图说明
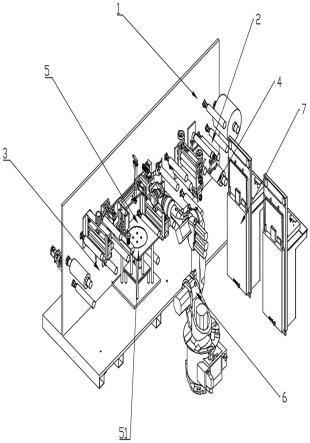
14.图1是全自动贴膜机的结构示意图;
15.图2是图1的侧视图;
16.图3是多功能机器人系统结构示意图;
17.图4是多功能机械手结构示意图;
18.图5是旋转切割组件的结构示意图;
19.图6是可调刀轮组的结构示意图。
20.1、机台架,2、复合膜放膜系统,21、放膜气涨轴,22、从动辊系,23、放膜缓存辊,24、张力控制检测辊,25、第一驱动辊,3、收余料系统,31、收余料气涨轴,32、第二驱动辊,33、余料收集辊系,34、第二缓存辊,4、保护膜收膜系统,41、保护膜收膜气涨轴,42、保护膜收膜辊系,5、晶圆贴膜系统,51、贴膜升降台,52、防静电贴膜辊,53、膜角度调节辊,6、多功能机器人系统,61、六轴机械臂,62、多功能机械手,621、底座,6211、吸盘机械手,6212、视觉系统,6213、旋转切割组件,62131、旋转驱动装置,62132、旋转臂,62133、可调刀轮组,62134、刀轮,7、供料系统。
具体实施方式
21.下面将结合本实用新型中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本实用新型一部分实施,而不是全部的实施,基于本实用新型的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
22.如图1-图6所示。全自动晶圆覆膜机,包括:机台架1、复合膜放膜系统2、收余料系统3、保护膜收膜系统4、晶圆贴膜系统5、多功能机器人系统6和供料系统7,所述复合膜放膜系统2、收余料系统3、保护膜收膜系统4设置在机台架1的纵向侧壁上,晶圆贴膜系统5设置在机台架1的水平架上,并处于复合膜放膜系统2和收余料系统3之间,多功能机器人系统6包括六轴机械臂61和固定在六轴机械臂61上的多功能机械手62,通过转到六轴机械臂61,多功能机械手62将晶圆由供料系统7运送到晶圆贴膜系统5,并对贴完pe膜的晶圆进行切割。复合膜包括pe膜和保护膜,复合膜卷从复合膜放膜系统2中放出,在经过晶圆贴膜贴膜系统之间,将pe膜和保护膜分开,保护膜被保护膜收膜系统4所回收,pe膜经过贴膜系统时,
与多功能机器人系统6所运送的晶圆贴合,随后多功能机器人将pe膜切割成与晶圆相匹配的大小,切割完成后的pe膜带被余料回收。
23.所述复合膜放膜系统2包括:放膜气涨轴21、从动辊系22和放膜缓存辊23,放膜气涨轴21的端部固定有放膜电磁制动器,放膜电磁制动器与张力控制辊24之间为电连接,张力控制辊24检测膜带的张力,反馈至放膜电磁制动器,保持复合膜始终张紧。复合膜放膜系统2还包括第一缓存辊,第一缓存辊作为滑块与设置在纵向侧壁上导轨连接,依靠自身的重力与膜带接触。所述复合膜放膜系统2与晶圆贴膜系统5之间设置有第一驱动辊25,第一驱动辊25下方设置第一定转辊,第一定转辊与第一驱动辊25之间存在供膜带前进的通道,且pe膜与第一驱动辊25紧密接触,保护膜与第一定转辊紧密接触。pe膜依次穿过各个辊,放膜电磁制动器与张力控制辊24之间的配合以及第一缓存辊依靠自重,保证复合膜带在放膜系统中,能够保持足够的张力。
24.保护膜收膜系统4包括保护膜收膜气涨轴41和保护膜收膜轮系,保护膜经第一定转辊,穿过保护膜收膜辊系42,缠绕在保护膜收膜气涨轴41上,保护膜收膜气涨轴41端部固定有保护膜收膜电磁制动器,保持保护膜被回收时保持始终张紧。
25.晶圆贴膜系统5包括贴膜升降台51、防静电贴膜辊52和膜角度调节辊53,防静电贴膜辊52通过二维移动装置固定在纵向侧壁上,经二维移动装置与贴膜升降平台上的pe膜接触,膜角度调节辊53通过升降气缸固定在纵向侧壁上,穿出贴膜升降平台的pe膜与膜角度调节辊53底部接触,使得膜带与水平面之间的角度不变。晶圆被多功能机器人系统6运送至贴膜升降平台后,升降平台上升,与pe膜接触,防静电贴膜辊52通过二维移动装置移动至pe膜上方,将pe膜压紧。
26.多功能机器人系统6包括六轴机械臂61和固定在六轴机械臂61上的多功能机械手62,多功能机械手62上包括底座621、底座621侧方固定有吸盘机械手6211,与吸盘机械手6211所在侧壁的相对侧壁设置旋转切割组件6213,与吸盘机械手6211所在侧壁的相邻侧壁设置视觉系统6212,视觉系统6212的朝向与旋转切割组件6213的朝向一致。吸盘机械手6211将晶圆从供料系统7中取出,放置在晶圆贴膜系统5中,使得晶圆开始贴膜,贴膜完成后,多功能机械手62转动,使得视觉系统6212对准晶圆,检测到晶圆的中心位置,和边缘位置,切割组件开始工作,对pe膜进行切割。切割完成后,吸盘机械手6211将晶圆放回供料系统7。
27.所述旋转切割组件6213包括:固定在底座621侧壁的旋转驱动装置62131、固定在旋转驱动装置62131输出轴末端的旋转臂62133和与旋转臂62133端部连接的可调刀轮62134组62133,其特征在于,所述可调刀轮62134组62133包括:刀轮62134安装座、摆动装置、活动板和刀轮62134;刀轮62134安装座固定在旋转臂62133端部,活动板与刀轮62134安装座之间通过摆动装置连接,刀轮62134暗转挂在活动板底部,在刀轮62134安装座远离旋转电机的端设置有u型缺口,摆动装置包括摆动板、摆动轴、调节板、调节丝杠和活动板;摆动板通过摆动轴设置在u型缺口内,摆动轴通过轴承固定在u型缺口的侧壁上,且摆动板与u型缺口相邻的侧壁之间留有余量;u型缺口的顶部和底部均固定有调节板,调节板底部开设有与u型缺口相对应的凹槽,顶部开设有调节孔;调节丝杠穿过调节孔并贯穿摆动板,且调节丝杠的径向面积小于调节孔的径向面积,并与摆动板之间为螺纹连接,丝杠的端部均螺纹连接有蝶形螺母;活动板与摆动板伸出u型缺口的侧壁连接,蝶形螺母与调节板之间设置
有半圆垫片,且半圆垫片穿过调节丝杠,半圆垫片的弧形面与调节板接触。活动板底部固定有门型刀轮62134固定座;刀轮62134同轴固定有刀轮62134轴承,通过刀轮62134销轴转动连接在门型刀轮62134固定座并通过刀轮62134卡簧对刀轮62134进行固定。控制调节丝杠使得,摆动装置绕摆动轴进行摆动,使得刀轮62134的角度能够得到精准的调节,方便刀轮62134对pe膜进行精准的切割,半圆垫片使得在摆动装置的摆动时不会卡死。
28.活动板与摆动板之间连接有缓冲装置,缓冲装置包括缓冲基板、缓冲弹簧、缓冲限位轴、直线导轨和缓冲挡板;缓冲挡板固定在活动板顶部;缓冲基板与摆动轴伸出u型缺口的侧壁连接,缓冲基板与直线导轨的滑块连接,直线导轨中的导轨固定在活动板上;缓冲限位轴穿过缓冲挡板,且一端与活动基板连接,另一端连接有缓冲垫片,缓冲垫片与缓冲挡板之间套设有缓冲弹簧。
29.旋转驱动装置62131包括旋转电机、旋转切割刀固定板、电机安装座和旋转轴;电机安装座固定在旋转切割刀固定板,旋转切割刀固定板与底座621连接,旋转轴固定旋转电机的输出端,并且末端与旋转机械臂连接。
30.所述收余料系统3包括余料气涨轴、第二驱动辊32、余料收集辊系33和第二缓存辊34,膜带穿过膜角度调节辊53后经第二驱动辊32的上表面出过余料收集辊系33,缠绕在余料气涨轴上,余料气涨轴端部固定有电磁制动器,保持pe膜被回收时保持始终张紧。
31.复合膜卷固定在放膜气涨轴21上,穿过放膜气涨轴21系,使得复合膜到达第一驱动辊25和第一定转辊之间,将复合膜分为pe膜和保护膜,保护膜穿过保护膜收膜轮系,缠绕在保护膜收膜气涨轴41上,pe膜经过晶圆贴膜系统5,同时,六轴机械臂61转动,使得多功能机械手62将供料系统7内的晶圆取出,放置在晶圆贴膜系统5的贴膜升降平台,平台升降使得晶圆与pe膜接触,防静电贴膜辊52在二维移动装置的装置,将pe膜压实在晶圆的表面,多功能机械手62转动,使得视觉系统6212对准晶圆,检测到晶圆的中心位置,和边缘位置,切割组件开始工作,对pe膜进行切割。切割完成后,吸盘机械手6211将晶圆放回供料系统7。切割完成的pe膜带穿过余料回收辊系,缠绕在余料回收气涨轴上。
32.复合膜放膜系统2内的气涨轴与放膜电磁制动器与张力控制辊24之间的配合以及第一缓存辊依靠自重,保证复合膜带在放膜系统中,能够保持足够的张力。防静电贴膜辊52通过二维移动装置移动至pe膜上方,将pe膜压紧。收余料系统3内的第二缓存辊34依靠自身的重力使得切割完成后的pe膜带始终保持足够的张力,多功能机器人系统6工作过程中灵活方便,切割组件中通过控制蝶形螺母调节刀轮62134角度,进行精准的切割,半圆垫片使得在摆动装置的摆动时不会卡死,刀轮62134在调节角度的过程中,缓冲装置能够防止刀轮62134升降的过快,造成损伤。视觉系统6212能够精准定位到晶圆的圆心以及晶圆的边缘。
33.本实用新型方案所公开的技术手段不仅限于上述实施方式所公开的技术手段,还包括由以上技术特征任意组合所组成的技术方案。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1