一种半导体激光器光源、光源阵列和多线激光雷达系统的制作方法
1.本实用新型涉及超透镜应用领域,具体而言,涉及一种半导体激光器光源、光源阵列和多线激光雷达系统。
背景技术:
2.目前,多线激光雷达是指同时发射及接收多束激光的激光旋转测距雷达,可以识别物体的高度信息并获取周围环境的3d扫描图,主要应用于无人驾驶,智慧城市等领域。多线激光雷达采用多个半导体激光器组成的激光器阵列作为信号源时,由于半导体激光器存在快轴 (垂直于pn结平面的方向)和慢轴(平行于pn结平面的方向)。且半导体激光器一般不是单个发光区,而是由多个发光区沿快轴按一定间隔周期线性排列组成。快轴和慢轴的发散角不同,当直接采用微透镜对半导体激光器的多个发光区分别发出的光束进行准直时,造成采用多个半导体激光器组成的激光器阵列作为信号源的多线激光雷达结构复杂且尺寸较大。
技术实现要素:
3.为解决上述问题,本实用新型实施例的目的在于提供一种半导体激光器光源、光源阵列和多线激光雷达系统。
4.第一方面,本实用新型实施例提供了一种半导体激光器光源,包括:半导体激光器单元和超透镜单元;
5.所述半导体激光器单元,包括:半导体激光器;
6.所述超透镜单元,包括:准直超透镜;
7.所述准直超透镜对所述半导体激光器发出的光线进行准直。
8.第二方面,本实用新型实施例还提供了一种半导体激光器光源阵列,包括:沿快轴方向或者慢轴方向排布的多个上述第一方面所述的半导体激光器光源。
9.第三方面,本实用新型实施例还提供了一种用于多线激光雷达系统的半导体激光器光源,包括:半导体激光器阵列、扩束超透镜阵列、第二超透镜阵列和第三超透镜阵列;
10.所述半导体激光器阵列,包括:沿着预设方向线性排布的2n个半导体激光器;其中,n为大于1的自然数,所述预设方向,包括:快轴方向或者慢轴方向;
11.所述扩束超透镜阵列,包括:沿着预设快轴方向线性排布的2n个扩束超透镜;2n个扩束超透镜中的各扩束超透镜能够对2n个半导体激光器中与各扩束超透镜对应设置的半导体激光器中多个发光区中的各发光区发出的激光光束进行扩束,得到各发光区所发出的激光光束的扫描光束;
12.所述第二超透镜阵列,包括:沿着预设快轴方向线性排布的2n个超透镜子阵列;2n个超透镜子阵列中的各超透镜子阵列,分别包括:并排设置的多个超透镜;2n个超透镜子阵列中的各超透镜子阵列对2n个半导体激光器中所有的发光区中与各超透镜子阵列对应设置的发光区发出的激光光束扩束后得到的扫描光束在快轴方向上进行准直;
13.所述第三超透镜阵列,包括:沿着预设慢轴方向线性排布的2n个超表面;2n个超表面中的各超表面分别对各半导体激光器中与各超表面对应设置的半导体激光器的各发光区所发出的激光光束扩束后得到的扫描光束在慢轴方向上进行准直。
14.第四方面,本实用新型实施例还提供了一种基于半导体激光器光源的多线激光雷达系统,包括:分光镜,mems振镜,回波信号接收模块以及上述第三方面所述的用于多线激光雷达系统的半导体激光器光源;
15.所述分光镜能够透过所述用于多线激光雷达系统的半导体激光器光源发出的2n个扫描光束,使得2n个扫描光束中的各扫描光束分别入射到所述mems振镜;其中,各所述扫描光束具有第一光学特性;
16.所述mems振镜,将入射的各扫描光束反射到目标物体的不同位置,通过各所述扫描光束对所述目标物体的不同位置进行扫描;
17.所述目标物体的不同位置被各所述扫描光束照射后,会生成2n个反射光束,所述2n个反射光束中的各反射光束依次经过所述mems 振镜以及所述分光镜的反射后,分别被所述回波信号接收模块接收,其中,各所述反射光束具有第二光学特性,所述第一光学特性与所述第二光学特性不同。
18.本实用新型实施例上述第一方面至第四方面提供的方案中,通过超透镜或者第三超透镜阵列这样的超透镜阵列对半导体激光器发出的光线进行准直或汇聚,来减小半导体激光器慢轴方向的发散角,并通过沿半导体激光器快轴方向或者慢轴方向排列的第一超透镜阵列和第二超透镜阵列,对半导体激光器光源中与第一超透镜阵列和第二超透镜阵列排布方式相同的半导体激光器中发光区所发出的激光光束的放大光束进行准直或者汇聚的方式,来减小半导体激光器快轴方向的发散角,提高出射的放大光束的准直度,与相关技术中采用微透镜进行半导体激光器的多个发光区分别发出的光束进行准直的方式相比,提高了半导体激光器光源的对准精度;而且,由于超透镜具有轻,薄,简,廉及产能高的优点,使得半导体激光器光源的整体规格可以更小更轻薄,基于半导体激光器光源的多线激光雷达系统具有小型化的特点;再者,由于超透镜具有无热化的技术特点,降低了使用超透镜的半导体激光器光源的温度敏感性,可以实现半导体激光器光源的长时间高效稳定工作。
19.为使本实用新型的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
附图说明
20.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
21.图1示出了本实用新型实施例所提供的一种半导体激光器光源中,半导体激光器的快轴方向和慢轴方向的示意图;
22.图2示出了本实用新型实施例所提供的一种半导体激光器光源中,快轴方向准直度高的半导体激光器光源的结构示意图一;
23.图3示出了本实用新型实施例所提供的一种半导体激光器光源中,快轴方向准直
度高的半导体激光器光源的结构示意图二;
24.图4示出了本实用新型实施例所提供的一种半导体激光器光源中,半导体激光器光源的排布方式示意图;
25.图5示出了本实用新型实施例所提供的一种半导体激光器光源中,可以提高出射光束在慢轴方向准直度的半导体激光器光源的俯视结构示意图;
26.图6示出了本实用新型实施例所提供的一种半导体激光器光源中,一种沿慢轴方向线性排布的可以提高出射光束在慢轴方向准直度的半导体激光器光源的俯视结构示意图;
27.图7示出了本实用新型实施例所提供的一种半导体激光器光源中,沿快轴方向线性排布的高准直度的用于多线激光雷达系统的半导体激光器光源的结构示意图;
28.图8示出了本实用新型实施例所提供的一种基于半导体激光器光源的多线激光雷达系统的结构示意图;
29.图9示出了本实用新型实施例所提供的一种半导体激光器光源中,扩束超透镜、超透镜、超表面以及汇聚超透镜中纳米结构以正六边形、正方形以及扇形的纳米结构单元的形式在基底上周期性排列的排布图。
具体实施方式
30.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
31.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
32.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
33.目前,多线激光雷达是指同时发射及接收多束激光的激光旋转测距雷达,可以识别物体的高度信息并获取周围环境的3d扫描图,主要应用于无人驾驶,智慧城市等领域。多线激光雷达采用多个半导体激光器组成的激光器阵列作为信号源时,由于半导体激光器存在快轴 (垂直于pn结平面的方向)和慢轴(平行于pn结平面的方向),且半导体激光器一般不是单个发光区,而是由多个发光区沿快轴按一定间隔周期线性排列组成。快轴和慢轴的发散角不同,当直接采用微透镜对半导体激光器的多个发光区分别发出的光束进行准直时,造成采用多个半导体激光器组成的激光器阵列作为信号源的多线激光雷达结构复杂且尺寸较大。
34.基于此,本技术实施例提出一种半导体激光器光源、光源阵列和多线激光雷达系统,通过超透镜或者第三超透镜阵列这样的超透镜阵列对半导体激光器发出的光线进行准直或汇聚,来减小半导体激光器慢轴方向的发散角,并通过沿半导体激光器快轴方向或者慢轴方向排列的第一超透镜阵列和第二超透镜阵列,对半导体激光器光源中与第一超透镜阵列和第二超透镜阵列排布方式相同的半导体激光器中发光区所发出的激光光束的放大光束进行准直或者汇聚的方式,来减小半导体激光器快轴方向的发散角,提高出射的放大光束的准直度;而且,由于超透镜具有轻,薄,简,廉及产能高的优点,使得半导体激光器光源的整体规格可以更小更轻薄,基于半导体激光器光源的多线激光雷达系统具有小型化的特点;再者,由于超透镜具有无热化的技术特点,降低了使用超透镜的半导体激光器光源的温度敏感性,可以实现半导体激光器光源的长时间高效稳定工作。
35.在对本实施例进行描述之前,先参见图1所示的半导体激光器的快轴方向和慢轴方向的示意图,在本实施例中,坐标系中x-z平面延伸方向是快轴方向,坐标系中x-y平面的延伸方向是慢轴方向。
36.为使本技术的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本技术做进一步详细的说明。
37.实施例
38.本实施例提出一种半导体激光器光源,至少包括:半导体激光器单元和超透镜单元。
39.为了减小半导体激光器慢轴方向的发散角,参见图5所示的一种可以提高出射光束在慢轴方向准直度的半导体激光器光源的俯视结构示意图,所述半导体激光器单元,包括:半导体激光器400;所述超透镜单元,包括:准直超透镜402。
40.所述准直超透镜对所述半导体激光器发出的光线进行准直。
41.参见图6所示的一种沿慢轴方向线性排布的可以提高出射光束在慢轴方向准直度的半导体激光器光源阵列的俯视结构示意图,在本实施例提出一种半导体激光器光源中:所述半导体激光器光源阵列,包括:沿快轴方向或者慢轴方向排布的多个上述半导体激光器光源。
42.在上述所述半导体激光器光源阵列中,所述准直超透镜与所述半导体激光器光源一一对应。
43.所述准直超透镜对与所述准直超透镜对应设置的半导体激光器发出的光线进行准直。
44.通过超透镜对半导体激光器的发出的光线进行准直,来减小半导体激光器慢轴方向的发散角。
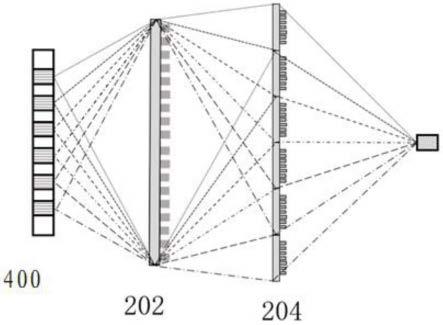
45.可选地,为了减小半导体激光器快轴方向的发散角,参见图2所示的一种快轴方向准直度高的半导体激光器光源的结构示意图一和参见图3所示的一种快轴方向准直度高的半导体激光器光源的结构示意图二,本实施例上述的提出一种快轴方向准直度高的半导体激光器光源中,所述半导体激光器单元,还包括:扩束超透镜202;所述超透镜单元,包括:第一超透镜阵列204。
46.所述半导体激光器,包括:多个沿快轴方向排布的发光区。
47.所述第一超透镜阵列,包括:多个超透镜。
48.所述扩束超透镜,对所述半导体激光器中多个发光区中的各发光区发出的激光光束进行扩束,得到各发光区所发出的激光光束的放大光束;其中,所述扩束超透镜与所述半导体激光器之间的距离小于等于扩束超透镜的焦距。
49.多个所述超透镜沿所述半导体激光器快轴方向线性排列,所述多个超透镜中的各超透镜对各所述发光区中与各超透镜对应设置的发光区发出的激光光束扩束后得到的放大光束进行汇聚或者准直。
50.多个超透镜中的各超透镜对各所述发光区中与各超透镜对应设置的发光区发出的激光光束扩束后得到的放大光束进行汇聚或者准直,使得放大光束中的至少部分放大光束在快轴方向上叠加,得到一个在快轴方向比半导体激光器发光区尺寸更小的像(即新的光源),该新的光源发出的光束在快轴方向的发散角更小,可以提高半导体激光器光源的出射光束在快轴方向的准直度。
51.参见图4所示的一种可以提高出射光束在快轴方向准直度的半导体激光器光源阵列的示意图,本实施例还提出一种可以提高出射光束在快轴方向准直度的半导体激光器光源阵列,包括:沿快轴方向或者慢轴方向排布的多个半导体激光器光源300。
52.多个半导体激光器光源300中的各半导体激光器光源,可以采用上述图2所示的半导体激光器光源、上述图3所示的半导体激光器光源、上述图5所示的半导体激光器光源阵列和/或者上述图6所示的半导体激光器光源阵列。
53.参见图7所示的一种沿快轴方向线性排布的高准直度的用于多线激光雷达系统的半导体激光器光源的结构示意图,本实施例还提出一种用于多线激光雷达系统的半导体激光器光源,包括:半导体激光器阵列600、扩束超透镜阵列602、第二超透镜阵列604和第三超透镜阵列606。
54.所述半导体激光器阵列,包括:沿着预设方向线性排布的2n个半导体激光器;其中,n为大于1的自然数,所述预设方向,包括:快轴方向或者慢轴方向。
55.所述扩束超透镜阵列,包括:沿着快轴方向线性排布的2n个扩束超透镜;2n个扩束超透镜中的各扩束超透镜能够对2n个半导体激光器中与各扩束超透镜对应设置的半导体激光器中多个发光区中的各发光区发出的激光光束进行扩束,得到各发光区所发出的激光光束的扫描光束。
56.所述第二超透镜阵列,包括:沿着快轴方向线性排布的2n个超透镜子阵列;2n个超透镜子阵列中的各超透镜子阵列,分别包括:并排设置的多个超透镜;2n个超透镜子阵列中的各超透镜子阵列对2n个半导体激光器中所有的发光区中与各超透镜子阵列对应设置的发光区发出的激光光束扩束后得到的扫描光束在快轴方向上进行准直。
57.所述第三超透镜阵列,包括:沿着慢轴方向线性排布的2n个超表面;2n个超表面中的各超表面分别对各半导体激光器中与各超表面对应设置的半导体激光器的各发光区所发出的激光光束扩束后得到的扫描光束在慢轴方向上进行准直。
58.根据n的数量大小,本实施例提出的用于多线激光雷达系统的半导体激光器光源,可以是发出4线、8线、16线、32线、64线或者 128线的扫描光束的激光雷达系统光源。
59.这里,若所述第二超透镜阵列中的2n个超透镜子阵列中的各超透镜子阵列对2n个半导体激光器中所有的发光区中与各超透镜子阵列对应设置的发光区发出的激光光束扩束后得到的扫描光束在快轴方向上进行汇聚,那么所述第三超透镜阵列中的2n个超表面中
的各超表面就是分别对各半导体激光器中与各超表面对应设置的半导体激光器的各发光区所发出的激光光束扩束后得到的扫描光束在慢轴方向上进行汇聚的。
60.若所述第二超透镜阵列中的2n个超透镜子阵列中的各超透镜子阵列对2n个半导体激光器中所有的发光区中与各超透镜子阵列对应设置的发光区发出的激光光束扩束后得到的扫描光束在快轴方向上进行准直,那么所述第三超透镜阵列中的2n个超表面中的各超表面就是分别对各半导体激光器中与各超表面对应设置的半导体激光器的各发光区所发出的激光光束扩束后得到的扫描光束在慢轴方向上进行准直的。
61.通过以上描述的内容可知,本实施例在用于多线激光雷达系统的半导体激光器光源中设置第二超透镜阵列保证可以在快轴方向上减小半导体激光器阵列所发出的扫描光束的发散角的同时,又设置第三超透镜阵列在慢轴方向上减小半导体激光器阵列所发出的扫描光束的发散角,提高半导体激光器阵列所发出的扫描光束的准直度。
62.参见图8所示的一种基于半导体激光器光源的多线激光雷达系统的结构示意图,本实施例还提出一种基于半导体激光器光源的多线激光雷达系统,包括:分光镜700,mems振镜702,回波信号接收模块以及上述的用于多线激光雷达系统的半导体激光器光源704。
63.所述分光镜能够透过所述用于多线激光雷达系统的半导体激光器光源发出的2n个扫描光束,使得2n个扫描光束中的各扫描光束分别入射到所述mems振镜;其中,各所述扫描光束具有第一光学特性。
64.所述mems振镜,将入射的各扫描光束反射到目标物体的不同位置,通过各所述扫描光束对所述目标物体的不同位置进行扫描。
65.所述目标物体的不同位置被各所述扫描光束照射后,会生成2n个反射光束,所述2n个反射光束中的各反射光束依次经过所述mems 振镜以及所述分光镜的反射后,分别被所述回波信号接收模块接收,其中,各所述反射光束具有第二光学特性,所述第一光学特性与所述第二光学特性不同。
66.根据n的数量大小,本实施例提出的基于半导体激光器光源的多线激光雷达系统,可以是4线、8线、16线、32线、64线或者128线激光雷达系统。
67.所述第一光学特性与所述第二光学特性,可以是不同的偏振特性,也可以是不同的光线波长,还可以是其他已知的任何不同的光学特性,这里不再一一赘述。
68.所述分光镜,可以为了满足对第一光学特性的光透射,对第二光学特性的光反射的要求而设计得到。具体的设计方式是现有技术,这里不再赘述。
69.为了对反射光束进行接收,在本实施例提出的基于半导体激光器光源的多线激光雷达系统中,所述回波信号接收模块,包括:汇聚超透镜阵列706和光电探测器阵列708。
70.所述汇聚超透镜阵列,包括:并排设置的多个汇聚超透镜。
71.所述光电探测器阵列,包括:并排设置的多个光电探测器。
72.多个汇聚超透镜中的各所述汇聚超透镜分别将入射的各反射光束汇聚到所述多个光电探测器中与各所述汇聚超透镜相对设置的光电探测器上。
73.可选地,汇聚超透镜阵列上的汇聚超透镜与光电探测器阵列中的光电探测器在排列上一一对应,光电探测器可以位于接收超透镜的下方。
74.所述光电探测器,将入射的反射光束转化为电信号。
75.在一个实施方式中,所述光电探测器,采用雪崩二极管或者单光子雪崩二极管。
76.所述扩束超透镜、所述超透镜、所述超表面以及所述汇聚超透镜,分别包括:衬底和设置在所述衬底上的纳米结构。
77.所述扩束超透镜、所述超透镜、所述超表面以及所述汇聚超透镜中的纳米结构的尺寸和周期并不相同。使得所述超透镜、所述超表面以及所述汇聚超透镜分别具有不同的功能。
78.所述扩束超透镜、所述超透镜、所述超表面以及所述汇聚超透镜是一层亚波长的人工纳米结构膜,可根据基底上的纳米结构来调制入射光。其中纳米结构包含全介质或等离子的纳米天线,可直接调控光的相位、幅度和偏振等特性。纳米结构可以采用全介质结构单元,在可见光波段具有高透过率,可选的材料包括但不限于:氧化钛、氮化硅、熔融石英、氧化铝、氮化镓、磷化镓和氢化非晶硅。纳米结构在基底上呈阵列排布,所述扩束超透镜、所述超透镜、所述超表面以及所述汇聚超透镜的基底的截面形状为正六边形和/或正方形和/或扇形,每个基底的中心位置,或者每个基底的中心位置和顶点位置分别设有一个纳米结构。
79.参见图9所示的扩束超透镜、超透镜、超表面以及汇聚超透镜中,纳米结构以正六边形、正方形以及扇形的纳米结构单元的形式在基底上周期性排列的排布图;图9中每个虚线围成的区域就是一个纳米结构单元;纳米结构单元的顶点和/或中心位置设置有纳米结构。在一些情况下,基底的一侧设置有纳米结构层。在一些情况下,基底的两侧都设置有纳米结构层。
80.所述扩束超透镜、所述超透镜、所述超表面以及所述汇聚超透镜的工作波段为红外波段。纳米结构之间可用空气填充或者其他透明的填充材料,需要注意的是,此填充材料的折射率与纳米结构的折射率差值的绝对值需大于等于0.5。纳米结构可为偏振相关的结构,如纳米鳍和纳米椭圆柱等结构,此类结构对入射光施加一个几何相位;纳米结构也可以是偏振无关结构,如纳米圆柱和纳米方柱等结构,此类结构对入射光施加一个传播相位。
81.所述扩束超透镜、所述超透镜、所述超表面以及所述汇聚超透镜,还分别包括:填充材料;
82.所述填充材料填充于多个所述纳米结构周围。
83.所述填充材料的折射率与所述纳米结构的折射率之间的差值的绝对值大于或等于0.5。
84.多个所述纳米结构阵列式排布在所述衬底上。
85.所述纳米结构为偏振相关结构或偏振无关结构;所述偏振相关结构.包括:纳米鳍或纳米椭圆柱;所述偏振无关结构,包括:纳米圆柱或纳米方柱。
86.为了对本实施例提出的基于半导体激光器光源的多线激光雷达系统进行控制,本实施例提出的基于半导体激光器光源的多线激光雷达系统,还包括:控制系统和处理系统。
87.所述控制系统,分别与用于多线激光雷达系统的半导体激光器光源和光电探测器连接,被构造为对用于多线激光雷达系统的半导体激光器光源和光电探测器进行控制的部件;所述处理系统与所述控制系统相连,对所述控制系统下达命令,同时对控制系统接收到的光电探测器对光信号进行光电转换后得到的探测值(即上述电信号)进行数据处理。
88.所述控制系统和所述处理系统,可以采用现有技术中的任何微处理器、微控制器、以及单片机,这里不再一一赘述。
89.所述控制系统,分别与用于多线激光雷达系统的半导体激光器光源和光电探测器连接,被构造为对用于多线激光雷达系统的半导体激光器光源和光电探测器进行控制的具体过程都是现有技术,这里不再赘述。
90.所述处理系统,对所述控制系统下达命令,同时对控制系统接收到的光电探测器对光信号进行光电转换后得到的探测值进行数据处理的过程是现有技术,这里不再赘述。
91.综上所述,本实施例提出一种半导体激光器光源、光源阵列和多线激光雷达系统,通过超透镜或者第三超透镜阵列这样的超透镜阵列对半导体激光器发出的光线进行准直或汇聚,来减小半导体激光器慢轴方向的发散角,并通过沿半导体激光器快轴方向或者慢轴方向排列的第一超透镜阵列和第二超透镜阵列,对半导体激光器光源中与第一超透镜阵列和第二超透镜阵列排布方式相同的半导体激光器中发光区所发出的激光光束的放大光束进行准直或者汇聚的方式,来减小半导体激光器快轴方向的发散角,提高出射的放大光束的准直度,与相关技术中采用微透镜进行半导体激光器的多个发光区分别发出的光束进行准直的方式相比,提高了半导体激光器光源的对准精度;而且,由于超透镜具有轻,薄,简,廉及产能高的优点,使得半导体激光器光源的整体规格可以更小更轻薄,基于半导体激光器光源的多线激光雷达系统具有小型化的特点;再者,由于超透镜具有无热化的技术特点,降低了使用超透镜的半导体激光器光源的温度敏感性,可以实现半导体激光器光源的长时间高效稳定工作。
92.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1