一种无人船辅助充电装置
本技术属于无人船辅助充电,具体涉及一种无人船辅助充电装置。
背景技术:
1、无人船是一种可以无需遥控,借助精确卫星定位和自身传感即可按照预设任务在水面航行的全自动水面机器人,其体量小、吃水浅、机动灵活,可以替代工作人员从事水上作业,在水环境检测、水文测量、安防、核安全、抗洪抢险等方面得到了越来越广泛的应用。
2、现在大多数的无人船的供电均使用锂电池或者蓄电池,但是受制于电池水平的限制,一般可以正常工作4-5小时就必须返航;因此目前市面上存在一些岸基充电装置,当无人船电力将要耗尽时,前往岸基进行充电即可,不需要拆卸电池就能实现充电;但是在由于水面会由于风力以及其他因素产生波动,导致无人船在充电过程中容易出现晃动的情况,导致无人船充电不稳定。
技术实现思路
1、有鉴于此,本实用新型提供了一种无人船辅助充电装置,以解决目前市面上存在一些岸基充电装置,不需要拆卸电池就能实现充电,但是充电过程中存在无人船容易晃动的问题。
2、本实用新型采用的技术方案如下:
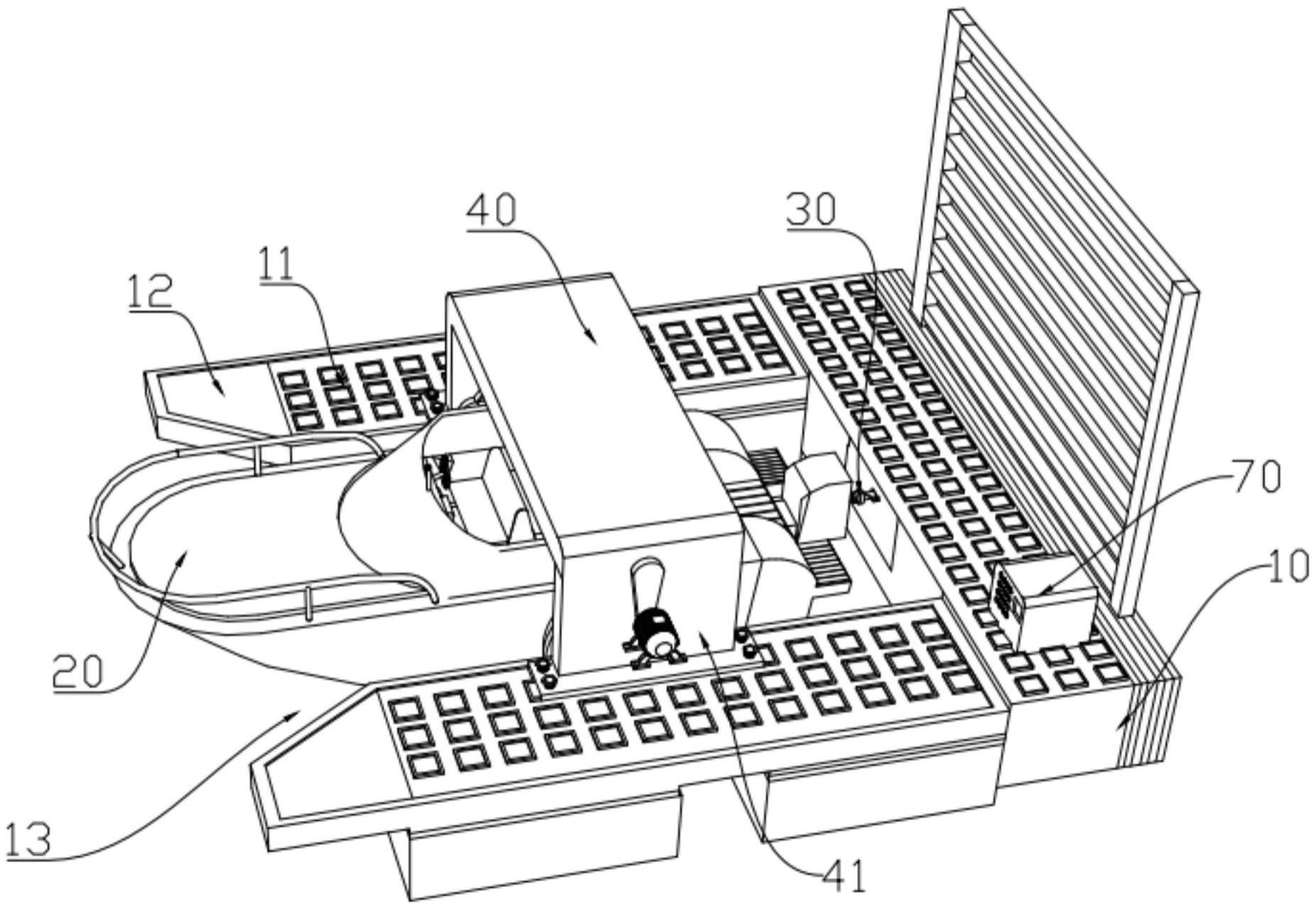
3、一种无人船辅助充电装置,包括基座,所述基座两侧都设有限位台,两个限位台之间形成用以放置船体的船位,所述船体尾部设有充电口,所述基座内设有伸缩件,所述伸缩件的一端穿出到基座外与充电头连接,所述充电头与充电口相对;
4、所两个所述限位台相对的一侧都设有夹板,所述限位台上还设有用以带动两个夹板朝相互靠拢或远离的方向移动的驱动装置。
5、该技术方案中,需要说明的是,无人船为现有技术,其可通过遥控进行控制,也可通过借助精确卫星定位和自身传感即可按照预设任务在水面航,这种水面智能机器人融合了船舶、通信、自动化、机器人控制等技术,实现了自主导航、智能避障、远距离通信、视频实时传输等功能(此为现有技术,在此不做过多说明);本方案中,当需要对无人船进行充电时,无人船可通过人工遥控的方式航行到船位处,当无人船到达指定位置后,通过驱动装置驱动两个夹板朝相互靠拢的方向移动,两个夹板靠近的同时,将无人船逐渐推动到船位的中间处,直到两个夹板将船体夹紧后,驱动装置关闭,此时船体上的充电口与基座上的充电头相对,伸缩件伸张,带动充电头插入充电口内,实现船体的充电;综上所述,本实用新型通过设置的夹板和驱动装置可以对船体进行定位,使得船体上的充电口与基座上的充电头对齐;且驱动装置和夹板也能对船体起到固定作用,使得船体在充电的过程中更加稳定。
6、优选的,所述船位上方通过支架支撑有安装板,所述安装板底部设有滑槽,所述滑槽滑动嵌设有两个滑块,两个滑块的底部分别和两个夹板连接;所述驱动装置包括导向杆、第一螺纹和第二螺纹,所述导向杆的两端分别和滑槽的两端转动连接,所述第一螺纹和第二螺纹间隔设在导向杆上,且所述第一螺纹和第二螺纹的旋向相反,两个滑块分别通过第一螺纹、第二螺纹与导向杆螺纹连接,所述导向杆的一端穿出到滑槽外与电机连接。
7、该技术方案中,需要说明的是,导向杆通过轴承与滑槽转动连接,滑块通过连接杆和夹板连接,为了保证夹板的稳定性,通过加强筋将连接杆的侧壁和夹板的顶部连接,使其形成三角形结构;当需要对船体进行固定和定位时,启动电机,电机带动导向杆转动,导向杆转动带动与其螺纹连接的两个滑块朝相互靠近的方向移动,即使得两个夹板朝相互靠拢的方向移动,直到将船体固定夹紧为止。
8、优选的,所述伸缩件为气缸,所述气缸的输出端与充电头连接,所述充电头通过电线与设在基座内部的电源连接。
9、该技术方案中,当船体通过夹板进行定位固定后,启动气缸,气缸带动充电头插入船体上的充电口内,充电时,电源将电能依次传递给电线、充电头、充电口。
10、优选的,两个所述夹板相对的一端都设有保护垫,所述保护垫由弹性材料制成。
11、该技术方案中,需要说明的是,保护垫具体可由橡胶材料制成,通过设置的保护垫起到对船体进行保护的作用,防止船体被夹板磨损。
12、优选的,两个保护垫相对的一端都设有若干防滑凸起,所述防滑凸起有弹性材料制成。
13、该技术方案中,通过设置的防滑凸起可以增到夹板与船体之间的摩擦,使得船体的稳定性能更好。
14、优选的,所述基座上设有控制器,所述保护垫内设有压力传感器,所述压力传感器、气缸、电机都分别和控制器电连接。
15、该技术方案中,需要说明的是,通过设置的压力传感器和控制器能够完成船体的自动充电,当船体到达船位后,工作人员通过摄像头(摄像头设在基座上,为现有技术)在电脑上看到船体,之后工作人员启动电机,电机带动导向杆转动,导向杆转动带动与其螺纹连接的两个滑块朝相互靠近的方向移动,即使得两个夹板朝相互靠拢的方向移动,当两个夹板将船体夹紧后,压力上升到a值,此时压力传感器将感应信号发送至控制器,控制器控制电机关闭,并控制气缸启动,使得气缸带动充电头插入充电口内,对船体进行充电。
16、优选的,两个所述限位台远离基座的一端都设有导向台,两个所述导向台形成八字形结构。
17、该技术方案中,需要说明的是,通过设置的两个导向台,用以对船体进行导向作用。
18、综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
19、本实用新型通过设置的夹板和驱动装置可以对船体进行定位,使得船体上的充电口与基座上的充电头对齐;且驱动装置和夹板也能对船体起到固定作用,使得船体在充电的过程中更加稳定。
技术特征:
1.一种无人船辅助充电装置,包括基座(10),所述基座(10)两侧都设有限位台(11),两个限位台(11)之间形成用以放置船体(20)的船位(13),其特征在于,所述船体(20)尾部设有充电口(21),所述基座(10)内设有伸缩件(31),所述伸缩件(31)的一端穿出到基座(10)外与充电头(30)连接,所述充电头(30)与充电口(21)相对;
2.根据权利要求1所述的一种无人船辅助充电装置,其特征在于,所述船位(13)上方通过支架(41)支撑有安装板(40),所述安装板(40)底部设有滑槽(42),所述滑槽(42)内滑动嵌设有两个滑块(63),两个所述滑块(63)的底部分别和两个夹板(50)连接;所述驱动装置包括导向杆(60)、第一螺纹(61)和第二螺纹(62),所述导向杆(60)的两端分别和滑槽(42)的两端转动连接,所述第一螺纹(61)和第二螺纹(62)间隔设在导向杆(60)上,且所述第一螺纹(61)和第二螺纹(62)的旋向相反,两个所述滑块(63)分别通过第一螺纹(61)、第二螺纹(62)与导向杆(60)螺纹连接。
3.根据权利要求2所述的一种无人船辅助充电装置,其特征在于,所述导向杆(60)的一端穿出到滑槽(42)外与电机(64)连接。
4.根据权利要求3所述的一种无人船辅助充电装置,其特征在于,所述伸缩件(31)为气缸,所述气缸的输出端与充电头(30)连接,所述充电头(30)通过电线(32)与设在基座(10)内部的电源(33)连接。
5.根据权利要求1-4任一所述的一种无人船辅助充电装置,其特征在于,两个所述夹板(50)相对的一端都设有保护垫(51),所述保护垫(51)由弹性材料制成。
6.根据权利要求5所述的一种无人船辅助充电装置,其特征在于,两个所述保护垫(51)相对的一端都设有若干防滑凸起(52),所述防滑凸起(52)由弹性材料制成。
7.根据权利要求5所述的一种无人船辅助充电装置,其特征在于,所述基座(10)上设有控制器(70),所述保护垫(51)内设有压力传感器(54),所述压力传感器(54)、气缸、电机(64)分别和控制器(70)电连接。
8.根据权利要求1-4任一所述的一种无人船辅助充电装置,其特征在于,两个所述限位台(11)远离基座(10)的一端都设有导向台(12),两个所述导向台(12)形成八字形结构。
技术总结
本技术公开了一种无人船辅助充电装置,属于无人船辅助充电技术领域,解决了现有技术中无人船充电过程中存在容易晃动的问题,其包括基座,所述基座两侧都设有限位台,两个限位台之间形成用以放置船体的船位,所述船体尾部设有充电口,所述基座内设有伸缩件,所述伸缩件的一端穿出到基座外与充电头连接,所述充电头与充电口相对;所两个所述限位台相对的一侧都设有夹板,所述限位台上还设有用以带动两个夹板朝相互靠拢或远离的方向移动的驱动装置。本技术通过设置的夹板和驱动装置可以对船体进行定位,使得船体上的充电口与基座上的充电头对齐;且驱动装置和夹板也能对船体起到固定作用,使得船体在充电的过程中更加稳定。
技术研发人员:杨怀德,郭剑岚,陈俞强,郑慧君,李建新
受保护的技术使用者:东莞职业技术学院
技术研发日:20221116
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!