一种巨量转移用三自由度混合支撑平台
本发明涉及一种微发光二极管巨量转移技术,尤其涉及一种巨量转移用三自由度混合支撑平台。
背景技术:
1、由发光二极管(light emitting diode,led)缩小至100微米以内的mini/microled具有超高解析度、高亮度、低功耗、无拼接缝隙及快响应等优势,被视为继lcd和oled技术之后新一代主流的显示技术。mini/micro led显示面板生产的工艺流程链长且复杂,主要包括芯片制备、芯片巨量转移和缺陷检测与修复等环节,其中巨量转移作为工艺流程链的最关键环节,直接影响了显示屏的生产成本、量产速度和良率。
2、激光剥离释放技术通过高能量和高功率的激光穿过玻璃基板作用在黏附芯片的转移晶膜上,在光热或光化学反应的作用下,降低芯片与转移晶膜间的粘附力,借助重力,使芯片自行脱落在驱动板上,其转移速度约为100kk/h,转移良品率可达99.999%,是巨量转移方案中最具有潜力的方案。激光剥离巨量转移方案中,需要运动定位平台将吸附芯片的玻璃板以及驱动电路板运送到激光的下方,利用工业ccd相机精准获取mini/micro led芯片的位置信息,通过运动定位平台微调驱动电路板,实现玻璃板上的芯片和驱动电路板上的焊点对准,在激光的作用下,使芯片剥落至驱动电路板的目标焊点上,通过电气互联完成显示面板的制备。在该过程中,运动定位平台的运行速度和定位精度是制约显示面板生产效率和良品率的关键所在。
3、根据支撑方式的不同,运动定位平台可分为机械构型、气浮构型和磁浮构型三类。
4、现有技术一:
5、中国专利202110883029.9所述的巨量转移设备,通过“伺服马达-滚轴丝杠”机械构型模块驱动目标基板载台、芯片玻璃板载台和激光头,实现芯片的巨量转移。该方案运动行程大、结构简单,但存在较大的摩擦磨损和振动,限制了平台的对位精度。申请专利201710632556.6所述的超精密气浮定位平台,采用气浮轴承定位,有效减小了平台振动,但气源较为复杂、机动能力较差。
6、现有技术二:
7、中国专利202111454735.8所述的led显示屏检测修复用六自由度洛伦兹平台,采用轴向平动径向偏转洛伦兹磁轴承和径向平动轴向旋转洛伦兹磁轴承实现平台悬浮和驱动,具有高运动定位精度、高动态响应速度和360°方位角调整能力,但悬浮功耗大,且定位精度受平台行程制约,仅适合小行程运动。综上所述,机械构型运动行程大、结构简单,但其固有摩擦磨损和振动制约了平台对位精度的进一步提升;气浮构型可有效隔离外界振动,无机械摩擦,但气源较为复杂、刚度难以调节、机动能力较差;磁浮构型具备主动振动控制和振动抑制能力,其定位精度可达纳米级,响应速度快,但悬浮功耗大,且定位精度受平台行程制约,仅适合小行程运动。
8、有鉴于此,特提出本发明。
技术实现思路
1、本发明的目的是提供了一种巨量转移用三自由度混合支撑平台,以解决现有技术中存在的上述技术问题,可有效提升芯片与焊点的对位速度和精度。
2、本发明的目的是通过以下技术方案实现的:
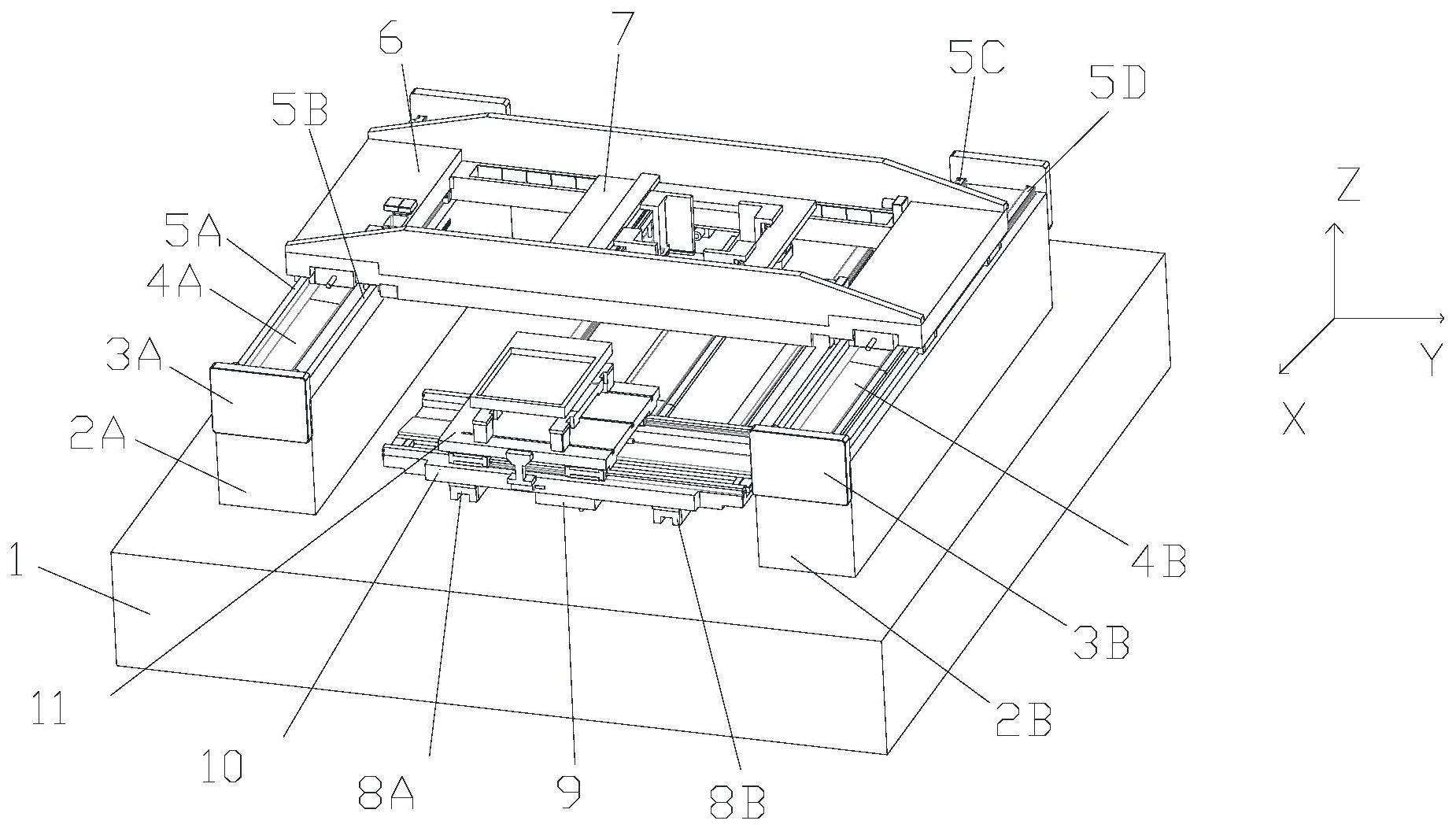
3、本发明的巨量转移用三自由度混合支撑平台,主要由上x方向机械轨道系统、y方向磁悬浮系统和下机械轨道系统三部分组成,上x方向机械轨道系统主要包括:大理石平台、支撑横梁、支撑横梁挡板、上x方向电机定子、上x方向导轨;y方向磁浮系统主要包括:玻璃板传送架组件和玻璃板载台组件;下机械轨道系统主要包括:底座运动平台左滑动导轨、底座运动平台右滑动导轨、底座电机定子、底座运动平台和基板传送架组件。大理石平台位于左支撑横梁和右支撑横梁的下端,左支撑横梁和右支撑横梁位于大理石平台的左右两侧,左支撑横梁和右支撑横梁位于大理石平台的上方,并通过紧固螺钉安装在大理石平台上,左支撑横梁挡板位于左支撑横梁的前端上方,并通过紧固螺钉分别安装在左支撑横梁上,右支撑横梁挡板位于右支撑横梁的前端上方,并通过紧固螺钉分别安装在右支撑横梁上,上x方向左电机定子位于左支撑横梁上表面中心位置,并通过紧固螺钉安装在左支撑横梁上,上x方向右电机定子位于右支撑横梁上表面中心位置,并通过紧固螺钉安装在右支撑横梁上,上x方向左外导轨和上x方向左内导轨对称分布在左支撑横梁上表面和上x方向左电机定子左右两侧,并通过紧固螺钉安装在左支撑横梁上,上x方向右内导轨和上x方向右外导轨对称分布在右支撑横梁上表面和上x方向右电机定子左右两侧,并通过紧固螺钉安装在右支撑横梁上,玻璃板传送架组件位于上x方向左电机定子和上x方向右电机定子上表面,玻璃板传送架组件位于玻璃板载台组件的下方,并通过玻璃板传送架组件底板上的滑块卡在上x方向左外导轨、上x方向左内导轨、上x方向右内导轨和上x方向右外导轨上,玻璃板载台组件位于玻璃板传送架组件上方,并通过玻璃板载台组件底端的滑块卡在玻璃板传送架组件的轨道上,底座运动平台左滑动导轨和底座运动平台右滑动导轨位于大理石平台的上表面,底座运动平台左滑动导轨和底座运动平台右滑动导轨位于左支撑横梁、左支撑横梁挡板和上x方向左电机定子的右侧,底座运动平台左滑动导轨和底座运动平台右滑动导轨位于右支撑横梁、右支撑横梁挡板和上x方向右电机定子的左侧,并通过紧固螺钉安装在大理石平台上,底座电机定子位于底座运动平台左滑动导轨和底座运动平台右滑动导轨的中间位置,并通过紧固螺钉安装在大理石平台上,底座运动平台位于底座运动平台左滑动导轨、底座运动平台右滑动导轨和底座电机定子的正上方,并通过底座运动平台上的滑块与底座运动平台左滑动导轨和底座运动平台右滑动导轨连接,基板传送架组件位于底座运动平台左滑动导轨和底座运动平台右滑动导轨的中间位置,基板传送架组件位于底座运动平台的正上方,并通过基板传送架组件上的滑块与底座运动平台上的导轨连接。
4、与现有技术相比,本发明所提供的巨量转移用三自由度混合支撑平台,综合机械构型运动定位平台和磁浮构型运动定位平台的优点,通过机械导轨式平面电机实现目标基板焊点和玻璃板芯片的x向行对位,利用磁浮系统实现玻璃板芯片的y向列快速机动,本方案兼具机械构型大行程、系统简单和磁浮构型高精度、快响应的优势,极大提高了芯片与目标焊点的对位速度和精度。
技术特征:
1.一种巨量转移用三自由度混合支撑平台,主要由上x方向机械轨道系统、y方向磁浮系统和下机械轨道系统三部分组成,上x方向机械轨道系统主要包括:大理石平台(1)、左支撑横梁(2a)、右支撑横梁(2b)、左支撑横梁挡板(3a)、右支撑横梁挡板(3b)、上x方向左电机定子(4a)、上x方向右电机定子(4b)、上x方向左外导轨(5a)、上x方向左内导轨(5b)、上x方向右内导轨(5c)和上x方向右外导轨(5d);y方向磁浮系统主要包括:玻璃板传送架组件(6)和玻璃板载台组件(7);下机械轨道系统主要包括:底座运动平台左滑动导轨(8a)、底座运动平台右滑动导轨(8b)、底座电机定子(9)、底座运动平台(10)和基板传送架组件(11)。大理石平台(1)位于左支撑横梁(2a)和右支撑横梁(2b)的下端,左支撑横梁(2a)和右支撑横梁(2b)位于大理石平台(1)的左右两侧,左支撑横梁(2a)和右支撑横梁(2b)位于大理石平台(1)的上方,并通过紧固螺钉安装在大理石平台(1)上,左支撑横梁挡板(3a)位于左支撑横梁(2a)的前端上方,并通过紧固螺钉分别安装在左支撑横梁(2a)上,右支撑横梁挡板(3b)位于右支撑横梁(2b)的前端上方,并通过紧固螺钉分别安装在右支撑横梁(2b)上,上x方向左电机定子(4a)位于左支撑横梁(2a)上表面中心位置,并通过紧固螺钉安装在左支撑横梁(2a)上,上x方向右电机定子(4b)位于右支撑横梁(2b)上表面中心位置,并通过紧固螺钉安装在右支撑横梁(2b)上,上x方向左外导轨(5a)和上x方向左内导轨(5b)对称分布在左支撑横梁(2a)上表面和上x方向左电机定子(4a)左右两侧,并通过紧固螺钉安装在左支撑横梁(2a)上,上x方向右内导轨(5c)和上x方向右外导轨(5d)对称分布在右支撑横梁(2b)上表面和上x方向右电机定子(4b)左右两侧,并通过紧固螺钉安装在右支撑横梁(2b)上,玻璃板传送架组件(6)位于上x方向左电机定子(4a)和上x方向右电机定子(4b)上表面,玻璃板传送架组件(6)位于玻璃板载台组件(7)的下方,并通过玻璃板传送架组件(6)底板上的滑块卡在上x方向左外导轨(5a)、上x方向左内导轨(5b)、上x方向右内导轨(5c)和上x方向右外导轨(5d)上,玻璃板载台组件(7)位于玻璃板传送架组件(6)上方,并通过玻璃板载台组件(7)底端的滑块卡在玻璃板传送架组件(6)的轨道上,底座运动平台左滑动导轨(8a)和底座运动平台右滑动导轨(8b)位于大理石平台(1)的上表面,底座运动平台左滑动导轨(8a)和底座运动平台右滑动导轨(8b)位于左支撑横梁(2a)、左支撑横梁挡板(3a)和上x方向左电机定子(4a)的右侧,底座运动平台左滑动导轨(8a)和底座运动平台右滑动导轨(8b)位于右支撑横梁(2b)、右支撑横梁挡板(3b)和上x方向右电机定子(4b)的左侧,并通过紧固螺钉安装在大理石平台(1)上,底座电机定子(9)位于底座运动平台左滑动导轨(8a)和底座运动平台右滑动导轨(8b)的中间位置,并通过紧固螺钉安装在大理石平台(1)上,底座运动平台(10)位于底座运动平台左滑动导轨(8a)、底座运动平台右滑动导轨(8b)和底座电机定子(9)的正上方,并通过底座运动平台(10)上的滑块与底座运动平台左滑动导轨(8a)和底座运动平台右滑动导轨(8b)连接,基板传送架组件(11)位于底座运动平台左滑动导轨(8a)和底座运动平台右滑动导轨(8b)的中间位置,基板传送架组件(11)位于底座运动平台(10)的正上方,并通过基板传送架组件(11)上的滑块与底座运动平台(10)上的导轨连接。
2.根据权利要求1所述的巨量转移用三自由度混合支撑平台,其特征在于:所述的玻璃板传送架组件(6)包括,玻璃板传送架主体(601)、左外前滑块(602a)、右外前滑块(602b)、左内前滑块(602c)、右内前滑块(602d)、左外后滑块(602e)、右外后滑块(602f)、左内后滑块(602g)、右内后滑块(602h)、浮驱一体左轨道(603a)、浮驱一体右轨道(603b)、轨道导向永磁体(604)、轨道承重永磁体(605)、前直线电机连接板(606a)、后直线电机连接板(606b)、前直线电机动子(607a)和后直线电机动子(607b)。
3.根据权利要求2所述的巨量转移用三自由度混合支撑平台,其特征在于:所述的玻璃板载台组件(7)包括,玻璃板载台组件主体(701)、浮驱一体左滑块(702a)、浮驱一体右滑块(702b)、左前电涡流位移传感器(703a)、右前电涡流位移传感器(703b)、左后电涡流位移传感器(703c)、右后电涡流位移传感器(703d)、左外前纵向阻尼线圈(704a)、左内前纵向阻尼线圈(704b)、左外后纵向阻尼线圈(704c)、左内后纵向阻尼线圈(704d)、右外前纵向阻尼线圈(704e)、右内前纵向阻尼线圈(704f)、右外后纵向阻尼线圈(704g)、右内后纵向阻尼线圈(704h)、左外前横向阻尼线圈(705a)、左内前横向阻尼线圈(705b)、左外后横向阻尼线圈(705c)、左内后横向阻尼线圈(705d)、右外前横向阻尼线圈(705e)、右内前横向阻尼线圈(705f)、右外后横向阻尼线圈(705g)、右内后横向阻尼线圈(705h)、左直线电机动子(706a)、右直线电机动子(706b)、滑块导向永磁体(707)和滑块承重永磁体(708)。
4.根据权利要求1所述的巨量转移用三自由度混合支撑平台,其特征在于:所述的底座运动平台(10)包括,底座运动平台主体(1001)、前导轨(1002a)、后导轨(1002b)、直线电机定子(1003)、左前滑块(1004a)、左后滑块(1004b)、右前滑块(1004c)、右后滑块(1004d)和直线电机动子(1005)。
5.根据权利要求1所述的巨量转移用三自由度混合支撑平台,其特征在于:所述的基板传送架组件(11)包括,基板传送架主体(1101)、左前滑块(1102a)、左后滑块(1102b)、右前滑块(1102c)、右后滑块(1102d)和直线电机动子(1103)。
6.根据权利要求3所述的巨量转移用三自由度混合支撑平台,其特征在于:所述的轨道导向永磁体(604)、轨道承重永磁体(605)、滑块导向永磁体(707)和滑块承重永磁体(708)均为衫钴合金或钕铁硼合金永磁材料。
7.根据权利要求3所述的巨量转移用三自由度混合支撑平台,其特征在于:所述的轨道导向永磁体(604)和滑块导向永磁体(707)均沿磁极面法向方向充磁,充磁方向依次为:左s右n、左n右s或者左n右s、左s右n。
8.根据权利要求3所述的巨量转移用三自由度混合支撑平台,其特征在于:所述的轨道承重永磁体(605)和滑块承重永磁体(708)均沿磁极面法向方向充磁,充磁方向依次为:上n下s、上s下n或者上s下n、上n下s。
9.根据权利要求3所述的巨量转移用三自由度混合支撑平台,其特征在于:所述的左前电涡流位移传感器(703a)、右前电涡流位移传感器(703b)、左后电涡流位移传感器(703c)和右后电涡流位移传感器(703d)用于实时测量玻璃板传送架组件(6)的振动量。
技术总结
本发明公开了一种巨量转移用三自由度混合支撑平台,由上X方向机械轨道系统、Y方向磁悬浮系统和下机械轨道系统三部分组成,上X方向机械轨道系统主要包括:大理石平台、支撑横梁、支撑横梁挡板、上X方向电机定子和上X方向导轨;Y方向磁悬浮系统主要包括:玻璃板传送架组件和玻璃板载台组件;下机械轨道系统主要包括:底座运动平台滑动导轨、底座电机定子、底座运动平台和基板传送架组件。本发明采用机械+磁浮混合构型,通过机械导轨实现目标焊点与芯片的X向行对位,利用磁浮系统实现芯片的Y向列快速机动,既有机械构型大行程、控制系统简单的优势,又具备磁浮构型高精度、快响应的特点,极大提高了芯片与焊点的对位速度和精度。
技术研发人员:刘强,王凯毅,马宁,李衡,王伟,李爱琴,王中辉
受保护的技术使用者:北京石油化工学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!